TurtleBot 3 & 2i ROS开源实验平台
TurtleBot 3 & 2i ROS开源实验平台,全球更受欢迎的ROS平台。
TurtleBot是ROS标准平台机器人,在全球开发人员和学生中深受欢迎。其有3个版本: TurtleBot1——在iRobot的Roomba研究机器人Create之上开发,用于ROS部署,于2010年开发并发售; TurtleBot2——2012年Yujin Robot在研究机器人iClebo Kobuki的基础上开发; TurtleBot3——2017年旨在补充其前代产品的不足功能和用户需求,采用ROBOTIS智能执行器Dynamixel用于驾驶。
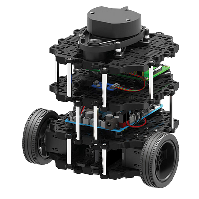
TurtleBot3 Burger
![]()
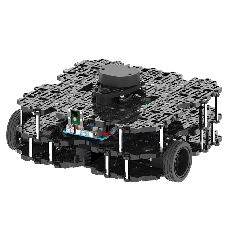
TurtleBot3 Waffle Pi
![]()
![]()
TurtleBot 2i
![]()
TurtleBot3是一款小型、价格适中、可编程的基于ROS的移动机器人,用于教育,研究,业余爱好和产品原型制作,目标是在不牺牲其功能品质和质量的情况下减小平台尺寸并降低价格,并提供可扩展性。 TurtleBot3的核心技术是SLAM(即时定位和构建地图)、导航和操纵,并可从实验室、笔记本电脑、游戏板或基于Android的智能手机实现远程控制;TurtleBot3可以进行移动跟随;可以连接操纵器(如开放式机械手)作为移动操作器来操纵对象。开放式机械手具有与Waffle Pi兼容的优势,弥补缺乏自由性的缺点,从而作为具有SLAM和导航功能的 服务机器人具有更高的完整性。 您可以根据对机械零件的重构方式及使用可选零件(例如计算机和传感器)对TurtleBot3进行各种自定义,更低成本、更小尺寸的SBC适用于强大的嵌入式系统、360度距离传感器和3D打印技术。
TurtleBot3特点 :

![]() 全球最受欢迎的ROS平台 ——小型,低成本,完全可编程,基于ROS的移动机器人
全球最受欢迎的ROS平台 ——小型,低成本,完全可编程,基于ROS的移动机器人

![]() 成本低 ——满足学校、实验室和公司对成本的需求 ——是配备SLAM、360°激光距离传感器LDS-01最实惠的移动机器人
成本低 ——满足学校、实验室和公司对成本的需求 ——是配备SLAM、360°激光距离传感器LDS-01最实惠的移动机器人

![]() 移动机器人模块化执行器 ——TurtleBot3可以通过在轮节中使用2个DYNAMIXEL来获得精确的空间数据。DYNAMIXELXM系列可以通过车轮速度控制模式、关节扭矩控制模式或位置控制模式等进行工作,甚至可用于制造轻巧但可以通过速度、扭矩和位置精确控制的移动机械手。
移动机器人模块化执行器 ——TurtleBot3可以通过在轮节中使用2个DYNAMIXEL来获得精确的空间数据。DYNAMIXELXM系列可以通过车轮速度控制模式、关节扭矩控制模式或位置控制模式等进行工作,甚至可用于制造轻巧但可以通过速度、扭矩和位置精确控制的移动机械手。

![]() 可扩展性 ——TurtleBot3鼓励用户通过一些可替代选项来自定义其机械结构: 开源嵌入式板(作为控制板),计算机和传感器等。 TurtleBot3 Burger是两轮差动驱动类型的平台,但可以在以下结构和机械上进行定制许多方式:汽车,自行车,拖车等。 通过可伸缩结构上的各种 SBC,传感器和电动机将您的想法扩展到超出想象的范围。
可扩展性 ——TurtleBot3鼓励用户通过一些可替代选项来自定义其机械结构: 开源嵌入式板(作为控制板),计算机和传感器等。 TurtleBot3 Burger是两轮差动驱动类型的平台,但可以在以下结构和机械上进行定制许多方式:汽车,自行车,拖车等。 通过可伸缩结构上的各种 SBC,传感器和电动机将您的想法扩展到超出想象的范围。

![]() 尺寸小 ——TurtleBot3 Burger的尺寸仅为138 x 178 x 192mm,可放在背包中在任何地方进行开发与测试
尺寸小 ——TurtleBot3 Burger的尺寸仅为138 x 178 x 192mm,可放在背包中在任何地方进行开发与测试

![]() ROS开放控制板 ——控制板以硬件方式和软件方式开源用于ROS通信。开源控制板OpenCR1.0不仅可以控制DYNAMIXEL,还可以控制ROBOTIS传感器,如触摸传感器,红外传感器,色彩传感器等。OpenCR1.0内部装有IMU传感器,可以增强对很多应用的精确控制。
ROS开放控制板 ——控制板以硬件方式和软件方式开源用于ROS通信。开源控制板OpenCR1.0不仅可以控制DYNAMIXEL,还可以控制ROBOTIS传感器,如触摸传感器,红外传感器,色彩传感器等。OpenCR1.0内部装有IMU传感器,可以增强对很多应用的精确控制。

![]() 强大的传感器阵容 ——TurtleBot3 Burger使用增强的360°LiDAR,9轴惯性测量单元和精确的编码器。TurtleBot3 Waffle建议使用功能强大的Intel®RealSense™和识别SDK。 Waffle Pi使用高效率的Raspberry Pi相机,这将是制造移动机器人的最佳硬件解决方案。
强大的传感器阵容 ——TurtleBot3 Burger使用增强的360°LiDAR,9轴惯性测量单元和精确的编码器。TurtleBot3 Waffle建议使用功能强大的Intel®RealSense™和识别SDK。 Waffle Pi使用高效率的Raspberry Pi相机,这将是制造移动机器人的最佳硬件解决方案。

![]() 开源平台 ——TurtleBot3的硬件、固件和软件是开源的,方便用户下载、修改和共享源代码。TurtleBot3的所有组件均采用注模塑料制造,以实现低成本,也提供3D CAD数据用于3D打印。对于想要自己制作OpenCR1.0板的用户,OpenCR1.0板的所有详细信息(如原理图,PCB gerber文件,BOM和固件源代码)均已根据用户和ROS的开源许可开放。
开源平台 ——TurtleBot3的硬件、固件和软件是开源的,方便用户下载、修改和共享源代码。TurtleBot3的所有组件均采用注模塑料制造,以实现低成本,也提供3D CAD数据用于3D打印。对于想要自己制作OpenCR1.0板的用户,OpenCR1.0板的所有详细信息(如原理图,PCB gerber文件,BOM和固件源代码)均已根据用户和ROS的开源许可开放。
TurtleBot3主要功能:

![]()
TurtleBot3 Burger & Waffle Pi
 Turtlebot3-Waffle-pi
Turtlebot3-Waffle-pi Turtlebot3-Burger
Turtlebot3-Burger
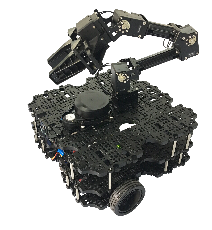
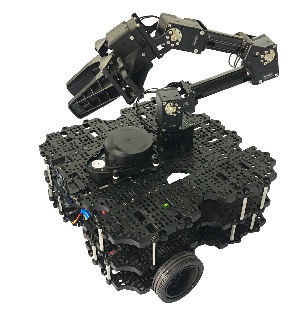
Waffle Pi+X52机械臂(视觉)扩展手
Waffle Pi 移动操纵手—Waffle Pi KT是一款功能更加强大的软件和硬件双开源的小型化ROS移动平台。采用模块化设计,除本身Waffle Pi传感器外,Waffle Pi KT基于四轮全向移动平台集成了小型5自由度的轻量机械手臂(OpenManipulatorRM-X52-TNM)、深度相机、功能更强大的开发版以及二维激光雷达。 Waffle Pi KT基于ROS机器人操作系统使之可以完成自主定位与导航,SLAM地图构建,物体识别与抓取,多关节手臂复杂环境下的运动规划等功能;适合用于ROS教学、科学研究、多机器人协作,以及机器人爱好者的产品原型设计等。
![]()
Turtlebot3 Burger视觉PRO版-ZNPTV
TB3 汉堡视觉 PRO 版的核心技术是 360 度 SLAM 导航和规划,通过360°点云探测物体的位置信息、距离信息、尺寸信息等,通过预处理视觉系统识别二维码,得到物体的身份信息,以及 WIFI 通讯模块实现多智能体的组网。
TB3 汉堡视觉 PRO 版可根据需要重新定制配置控制器、传感器、3D 打印机械部件等;核心目标是成为学生“软件开发”、“动手实践”、“多机器人协作”、“创意展示”、“竞赛”等综合平台,最大程度的激发出学生们对机器人学习兴趣,从而激发学生自发的求知欲和创造欲。
 Turtlebot3 Burger视觉PRO版-ZNPTV
Turtlebot3 Burger视觉PRO版-ZNPTVTurtlebot 2i
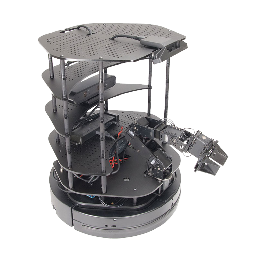
TurtleBot 2i移动研究机器人是一种基于ROS的模块化机器人平台。TurtleBot 2i对TurtleBot的先前迭代进行了改进,具有全新设计的模块化底盘,并且实现了对机械臂的本地支持。TurtleBot 2i提供了Pincher MK3 4 DOF机械臂作为受支持的标准选件,允许机器人与现实世界中的小物体交互,从而有效地将TurtleBot转变为功能强大的移动操纵器,以更加平易近人的方式将以前令人生畏的技术和研究领域,例如自主导航和机器人操纵带入创新者和开发人员的手中。
![]()

![]()



Turtlebot 2i 技术特点
1、TurtleBot 2i由Intel NUC BOXNUC6CAYH驱动,具有双3D摄像头配置,使用专用的远程Orbbec Astra进行导航和制图,以及短距离的Intel RealSense摄像头SR300系列作为专用的操作工作空间传感器。
2、TurtleBot 2i提供了Pincher MK3机械臂作为支持的标准,允许该机器人与现实世界中的小物体,按钮和工具进行交互。 Arbotix-M Robocontroller为Pincher Mk3手臂提供了一个接口,该接口使用开源逆运动学解决方案MoveIt实现,允许用户仅使用高级命令来控制手臂。
![]()



![]()
TurtleBot 2i ROS软件/演示功能
1.创建地图
2.自主导航和点云映射
3.前进避障和路径规划
4.地图区域标识和航点
5.定点自导航 ·跟随演示
6.机器人手臂对象的处理和排序
7.远程操作示例
8.带底座的自动充电

![]()
应用场合
-个人自主搭建属于自己的机器人
-机器人研发&及机器人示范教育
-多功能机器人研究用
-对开源社区软件培训及学习用
目标人群
-学生,如自动化,电子及计算机软件专业
-研发人员
-相关教师,技术培训人员
-机器人爱好者

![]()

![]()
TurtleBot 2i配备有ROS开放源码的SDK,及相关的示例源代码,以帮助使用者开发及测试自己开发机器人算法程序。并且由于TurtleBot 2i价格便宜,非常适合用来做机器人研究以及为个人或家庭提供机器人开发平台,故正在被越来越多的院校、研究所以及个人所采用。 与此同时您完全不用担心购买后的使用问题,智能佳有专业的技术服务支持团队为你提供支持。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号