
OpenManipulator RM-X52 ROS 开源机械臂
DYNAMIXEL PRO PH54-200-S500-R 简介

![]()
此款机械臂可以直接装配到TurtleBot3 Waffle上使用,对于TurtleBot3 Burger需要对机器人底盘重新改装才能装配使用,相关事宜请咨询我司! OpenManipulator是一款基于ROS开源平台的机械臂,它的软件和硬件都是开源的,使用的是嵌入式控制板OpenCR(当然,用户可以使用自己的软件和控制器,只要符合robotis Dynamixel控制协议即可)。机械臂除了金属衔接件,其他骨架可3D打印。 本款机械臂是基于ROS的精简版; 由于采用了舵机XM-430系列舵机,使其具有了较高的有效载荷; PC或移动平台可使用,方便快速。同时可兼容产品,如TB3 WafflePi; 提供源代码和开发环境,帮助您迅速操作TB3 WafflePi; 您可以自由选择,使用PC或使用控制器。如控制器OpenCR;
可用于:开放源码软件、3D绘图、CAD数据等方向的研究
产品特点
▪低成本,高重复性,MAX有效载荷500g
▪带有反馈的精密伺服控制(DYNAMIXEL X系列)
▪模块化结构和多合一设计 ▪易于与PC或嵌入式板一起使用
▪开源硬件(CAD)和软件(SDK)
▪重量轻,可与移动机器人平台集成

![]()
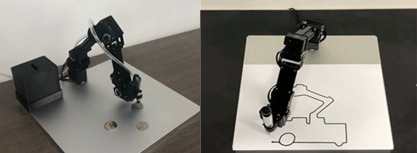
OpenManipulator RM-X52为开放式机械手,提供开源CAD,软件,硬件设计和公共资源进行开发

![]()
开发环境与链接方式

![]()
产品参数
电源 (单独出售) 12V
自由度 5 (4自由度 + 1自由度 Gripper)
负载 500g
RPM (关节) 46RPM
重量 (装配) 700g
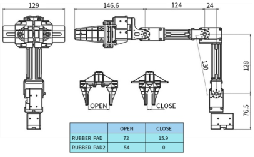
长度 380mm
夹持力 20~75mm
接口 TTL Level Multi Drop BUS
软件 ROS. DYNAMIXEL SDK, Arduino, Processing
控制器 (单独出售) PC, OpenCR
![]()

![]()
配置

![]()

![]()
开源硬件和开源软件
Open-source Hardware
CAD Date : OnShape(Search “ROBOTIS”)
Chain : https://goo.gl/NsqJMu
SCARA : https://goo.gl/oVsK8m
Link : https://goo.gl/MJ6C8K
Open-source Software
Firmware & ROS package : Github(Search “ROBOTIS-GIT”)
OpenManipulator : https://github.com/ROBOTIS-GIT/open_manipulator
OpenCR : https://github.com/ROBOTIS-GIT/OpenCR
![]()

![]()

![]()
可选搭配方案

![]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号