智能佳机械软手智能研究版 QB SOFTHAND Research

智能佳机械软手智能研究版是一种基于软机器人技术的拟人机器人手,灵活、适应性强,能够与周围环境、物体和人类进行交互,同时限制伤害操作员、破坏要处理的产品和破坏机器人本身的风险。 智能佳机械软手智能研究版具有适应性,可以抓住不同的对象,而控制动作没有任何变化,表现出无与伦比的简单性和灵活性。 由于其软性,qbrobotics 的手在简单和内在智能的设计中利用了协同原理,该设计不仅在人机交互使用中安全,而且能够适应各种物体,控制动作不用发生任何变化。 创新的结合使这个柔性抓握装置,可以抓住各种各样的对象。单电机驱动使手即插即用易于控制(单电机需要一个电机需要一个控制信号来关闭和打开整个手)而且价格合理。机器人手 QB SoftHand Rsearch 可以很容易地与市场上的主要机器人品牌集成, 也是由丹麦机器人公司通用机器人认证的 UR+ 。 智能佳机械软手智能研究版专为教育部门,特别是为研究机构、大学、学校、测试实验室以及私人和上市公司的研发部门而设计。
特征和关键特征
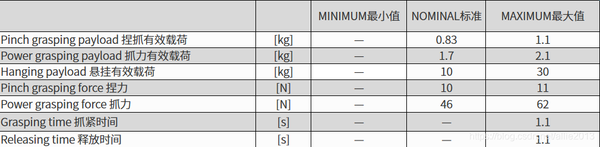
柔和的机器人设计,具有灵活性、适应性、鲁棒性 在一个单一的协同运动中控制19个拟人化自由度 可移位和自我复位的指骨; 高达60 N的抓握力; 最大有效载荷达2.0千克; 最大关闭时间为1.1 s; 总重量770克(包括铝制法兰和螺钉); 通用机器人+即插即用认证; 提供ROS软件包和常规C ++ API 抓取力和有效载荷高度取决于物体尺寸和接近策略
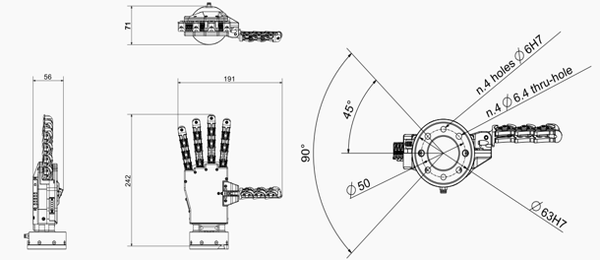
QB SoftHand图纸
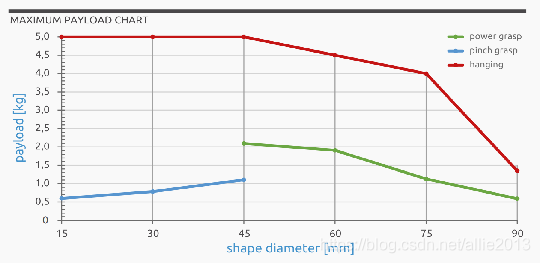
最大抓力图示意

最大有效载荷图
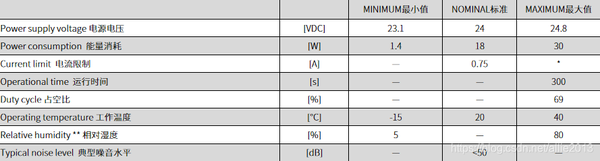
电气特性
兼容机器人品牌

应用领域


 浙公网安备 33010602011771号
浙公网安备 33010602011771号