
Turtlebot3新手教程:OpenCR软件设置(shell)
*本文针对如何利用脚本来更新固件进行讲解
具体步骤如下:
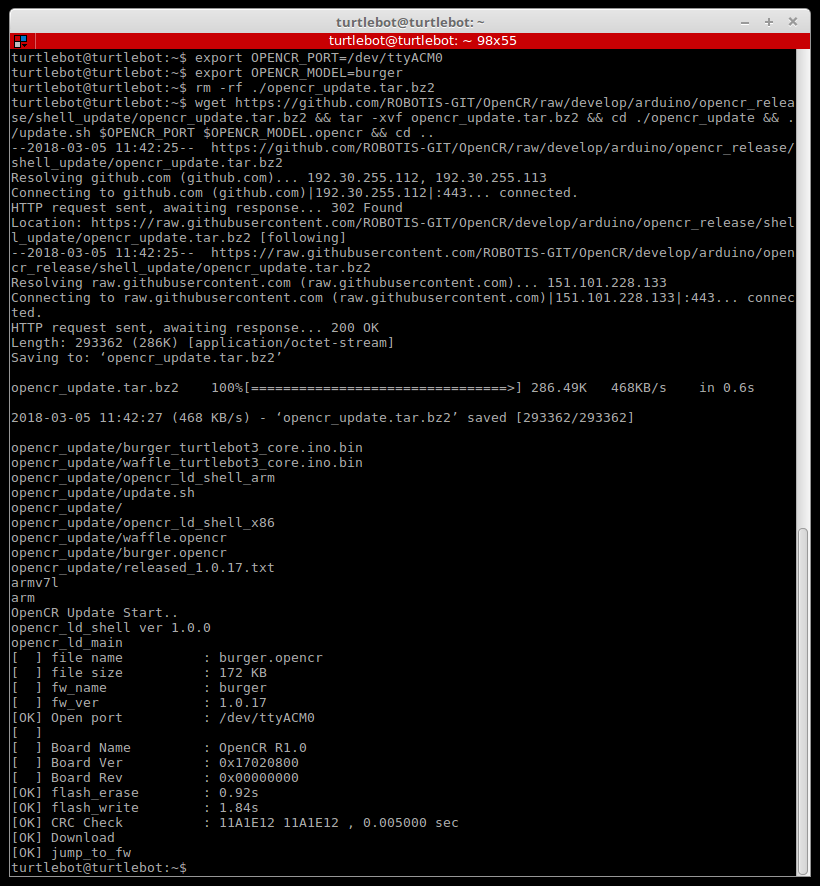
burger的固件更新
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=burger
$ rm -rf ./opencr_update.tar.bz2
$wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 && tar -xvf opencr_update.tar.bz2 && cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd ..
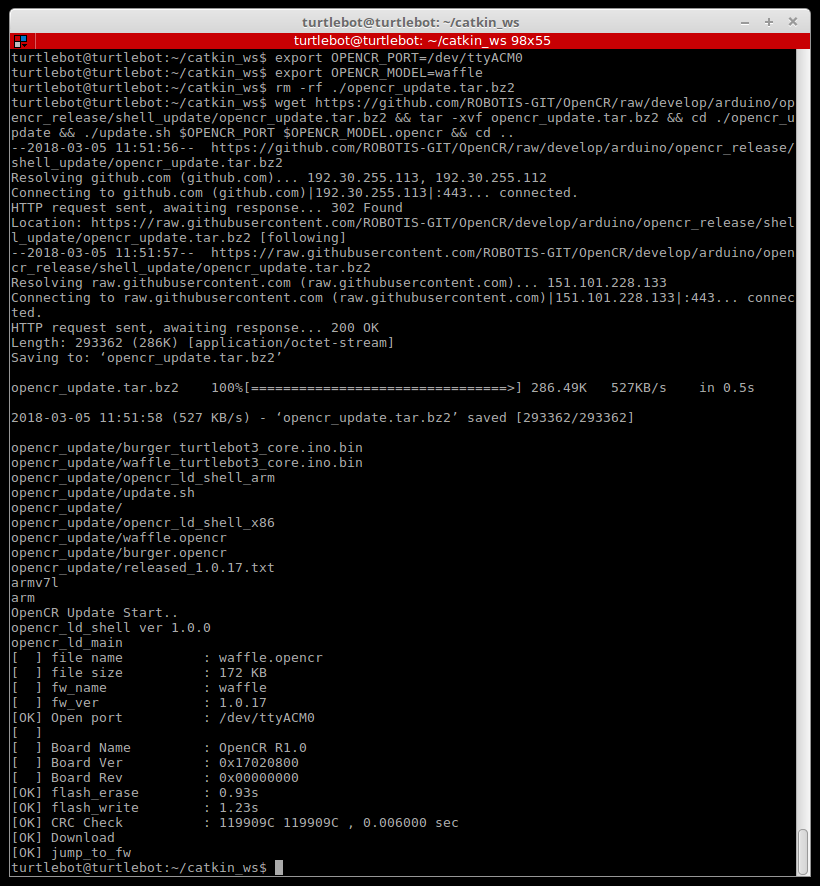
waffle或waffle pi的固件更新
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=waffle
$ rm -rf ./opencr_update.tar.bz2
$wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 && tar -xvf opencr_update.tar.bz2 && cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd ..

 浙公网安备 33010602011771号
浙公网安备 33010602011771号