
TurtleBot3 Waffle (tx2版华夫)(6)
重要提示:请在配网通信成功后进行操作,配网后再次开机需要重新验证通信;
重要提示:[Remote PC]代表PC端、[TurtelBot]代表树莓派端;
操作步骤如下:
1)[Remote PC] 启动roscore;
$ roscore
2)[Turbot3] 启动底盘;
$ roslaunch turbot3_bringup minimal.launch
3)[Turbot3] 启动相机;
$ roslaunch freenect_launch freenect-registered-xyzrgb.launch
4)[Remote PC] 监听是否获取到图像数据;
$ rostopic hz /camera/rgb/image_color
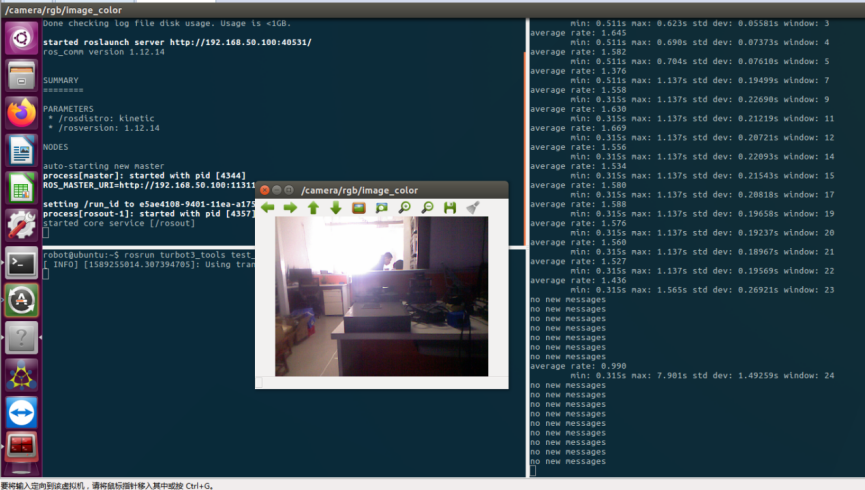
5)[Remote PC] 执行显示图像;
$ rosrun turbot3_tools test_kinect_color
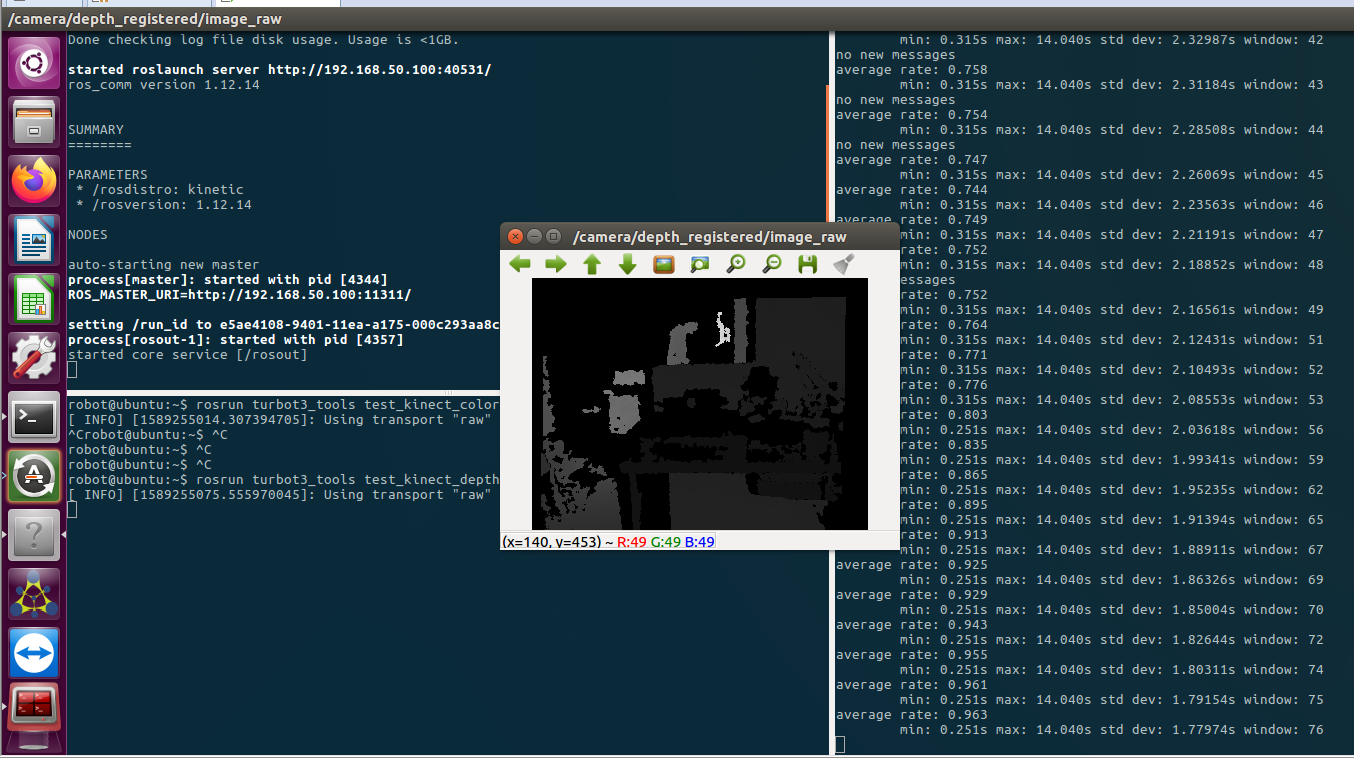
6)[Remote PC] 执行显示深度图;
$ rosrun turbot3_tools test_kinect_depth

 浙公网安备 33010602011771号
浙公网安备 33010602011771号