
TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板
1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可:

2) 下载后打开,键入Turbot3的ip à回车à选择连接:

3) 登录后,电脑端显示的控制画面,即可进行操作。
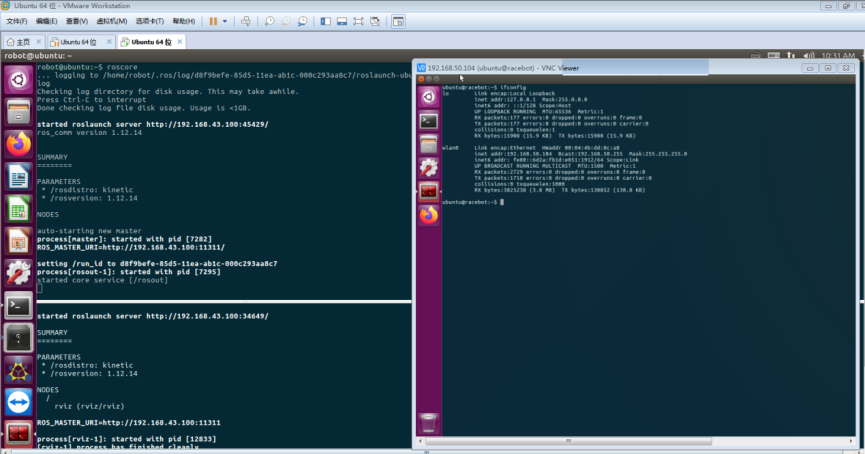
4) 打开Ubuntu,这样就可以同时控制两端:
4.2. IP的配置
4.2.1.获取Remote PC和Turbot3的IP
首先获取Remote PC端和Turbot3端的IP
$ ifconfig

键入命令后回车à获取IP
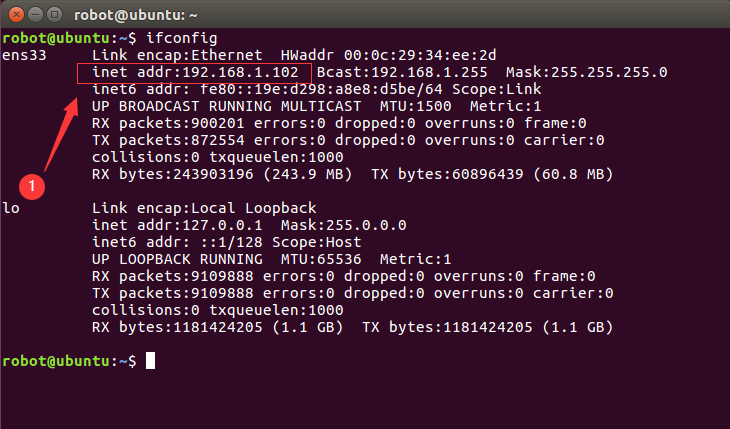
如上图获取的Remote PC的IP为:192.168.1.102
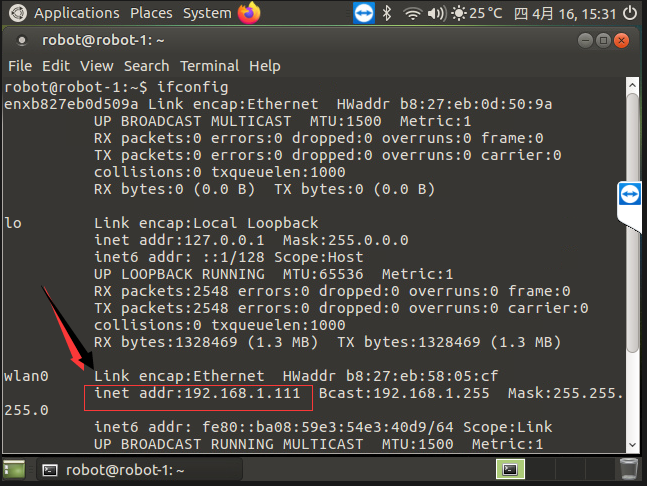
获取的Turbot3的IP为:192.168.1.111
4.2.2.修改Remote PC和Turbot3的IP
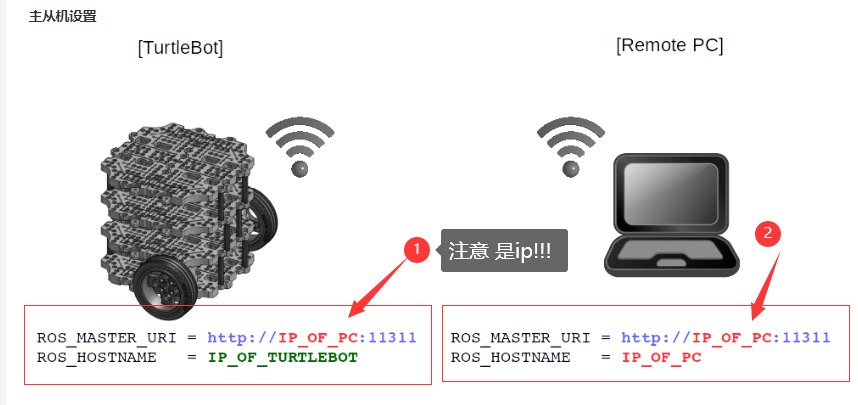
修改IP的命令为:
$ gedit ~/.bashrc
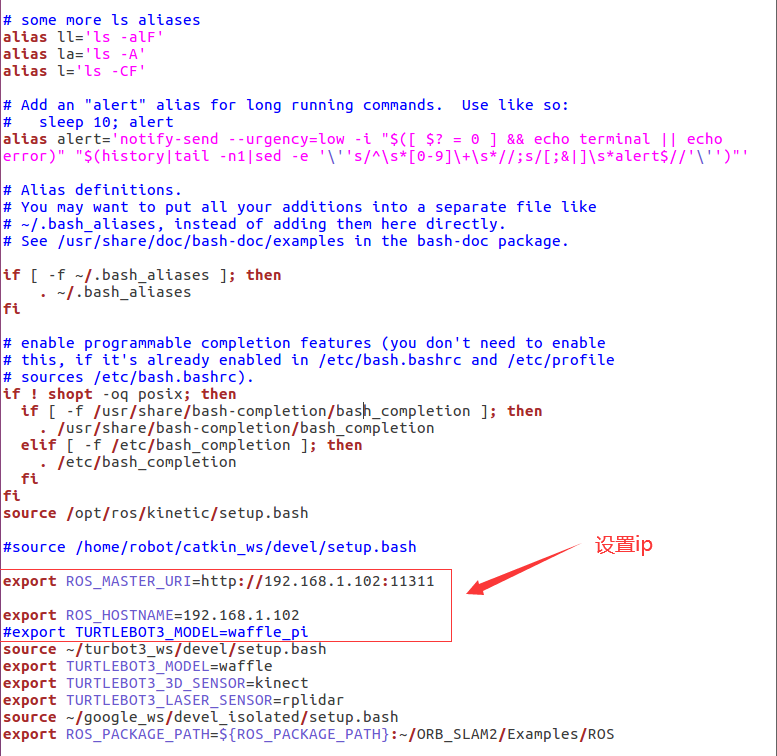
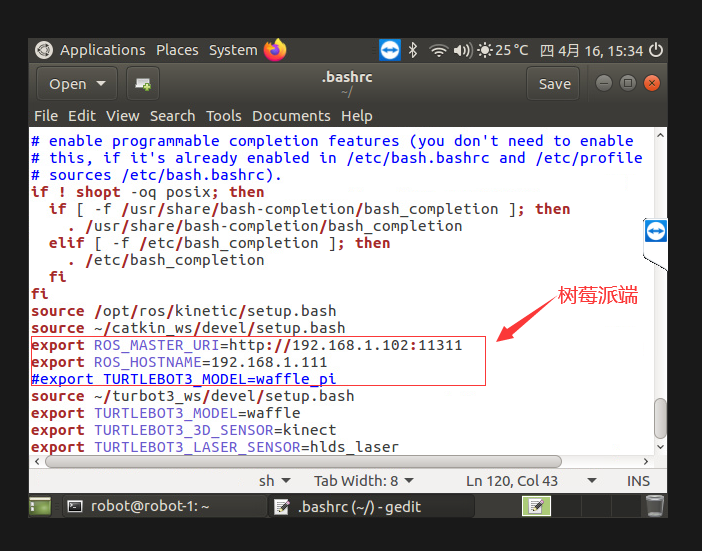
4.2.3.保存Remote PC和Turbot3端的修改
[Turbot3 && Remote PC] 让环境生效,配置的命令为:
$ source ~/.bashrc
4.3.通信测试
[Remote PC]端键入命令,启动roscore
$ roscore

[Turbot3]端键入通信命令(查看是否订阅到主机发布的话题):
$ rostopic list
出现上图,及说明通信成功。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号