
第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
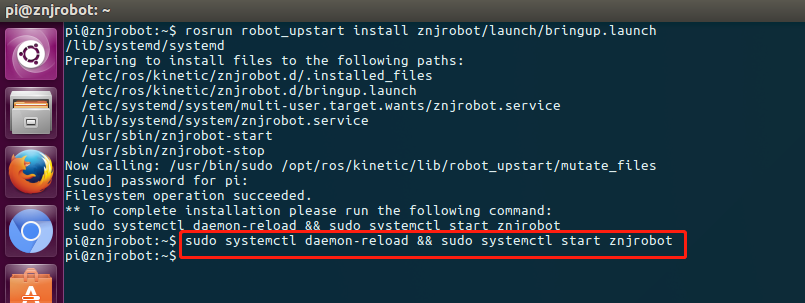
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch

2.按照上一步提示运行命令:sudo systemctl daemon-reload && sudo systemctl start znjrobot。
3.再继续运行 sudo service znjrobot start

4.此时通过 rostopic list,可以查看到 bringup.launch,已经导入开机自启动服务。

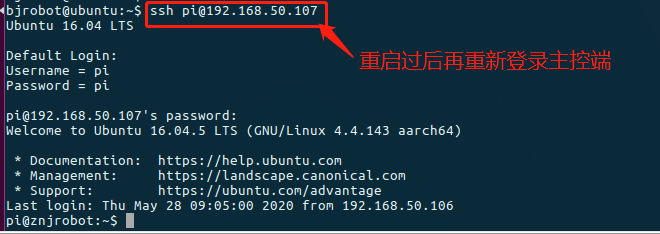
5.按下图输入命令重启主控,重启后再 ssh 过去主控端。

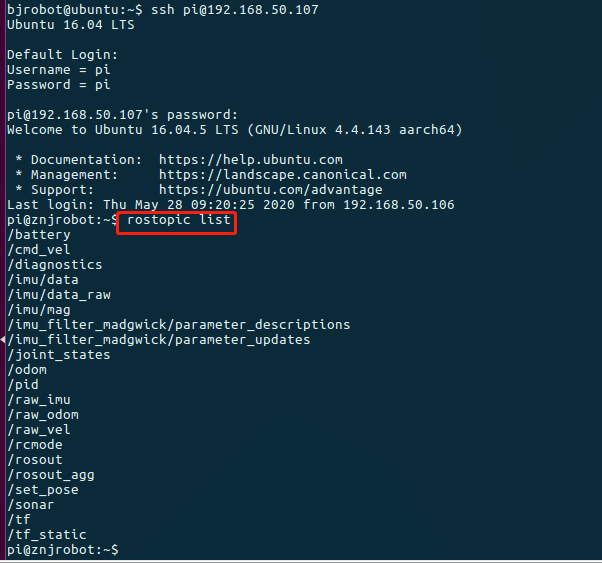
6.此时主控是重启后的,运行 rostopic list 可以看到 bringup.launch 启动后的相关话题。
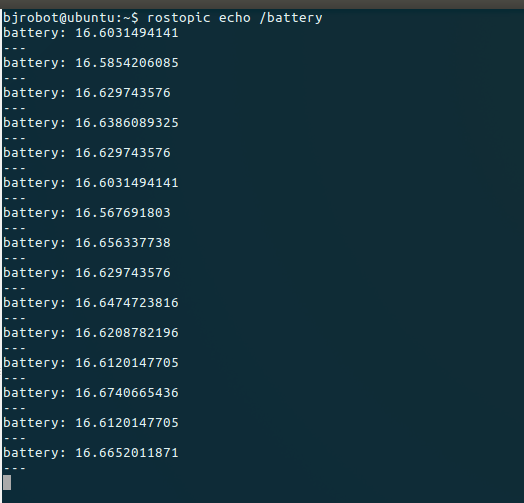
7.在虚拟机端打开一个终端,输入 rostopic echo /battery,可以在虚拟机端查看到主控端发布的电池电压话题信息。
8.在上一个步骤用键盘 ctrl+c 取消话题信息输入,然后启动键盘控制小车移动。
Rosrunteleop_twist_keyboard teleop_twist_keyboard.py。
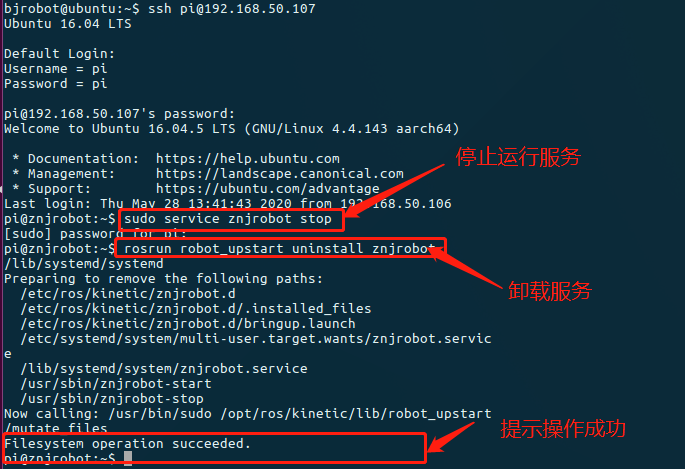
9.按下图步骤可以取消开机自启动服务。
登录主控端:sudo service znjrobot stop
rosrun robot_upstart uninstall znjrobot

 浙公网安备 33010602011771号
浙公网安备 33010602011771号