第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下。另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以跟随。
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch。
2.在虚拟机端再打开一个终端,ssh 过去启动 roslaunch znj_lidar_follower laser_follower.launch
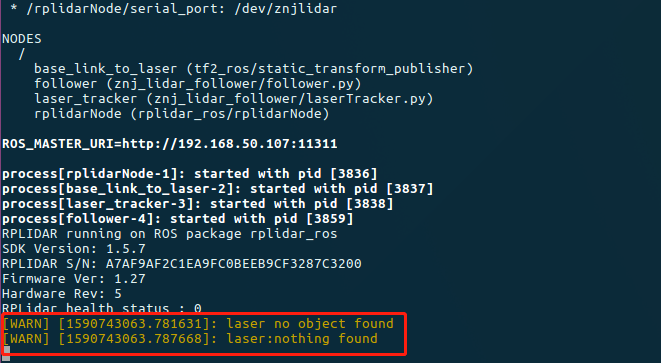
3.如下图出现的警告是因为没有识别物体,此时站过去小车前面,前后左右行走即可实现雷达跟随。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号