智能佳—E-PUCK2分布式单体智能集群协作机器人

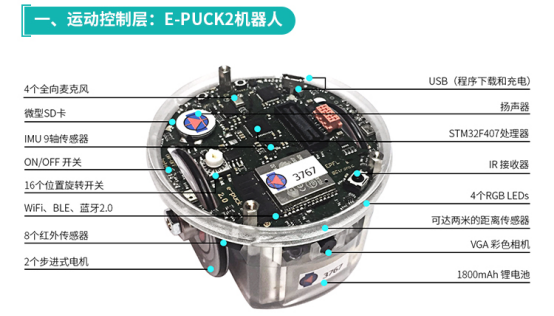
E-PUCK2.0轮式机器人
直径70mm 高度45mm
STM32处理器
配置丰富传感器
E-PUCK2.1嵌入式机器人
E-PUCK 2.0嵌入式机器人SP-puck 核心控制单体智能算力更高
E-PUCK2.3分布式控制机器人
E-PUCK2.0嵌入式机器人SP-puck核心控制R&B测距模块360度环视摄像头基于高频投影定位下的集中式与分布式群体控制

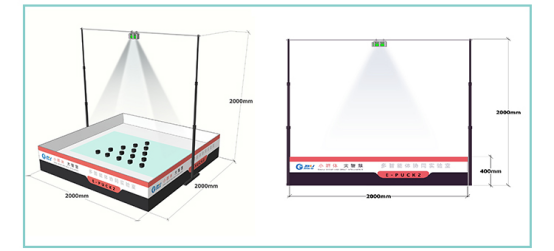
群体智能测试场地
2x2m场地摄像头支架安装配件安装手册

E-PUCK2群体智能协作系统介绍
E-PUCK 2.0(伊普克)嵌入式机器人是由瑞士洛桑联邦理工学院(EPFL )开发小型移动式机器人,已在国内外上百所高校和研究院在使用,例如斯坦福、剑桥大学、苏黎世联邦理工学院、清华大学、北京大学、国防科技大学等,并有很多研究成果发表在IEEE、FreeCheck等核心期刊中。
随着科技的发展,单体智能机器人已经不能满足不断提高的控制系统性能需求,多智能体机器人协同控制以其更好的智能性和自适应等优势,逐渐成为机器人控制领域的研究热点。分布式控制是一种去中心化的多智能体协同的系统设计方法,在适应复杂环境的能力、提高系统的工作效率等方面都具有重要的理论和实际意义。
E-PUCK分布式群体智能特点

E-PUCK2.3分布式群体智能协同系统架构
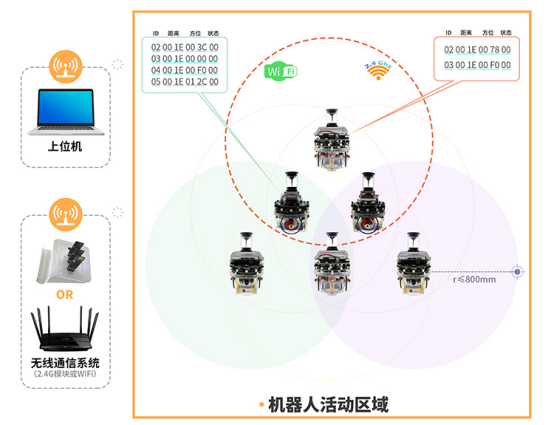
上位机:作为辅助调试设备负责远程监听所有机器人的信息,用于数据统计与分析,优化集群算法;
无线通信系统:负责上位机与机器人建立无线连接,给机器人发送起始信号,实时接收机器人状态信息等;
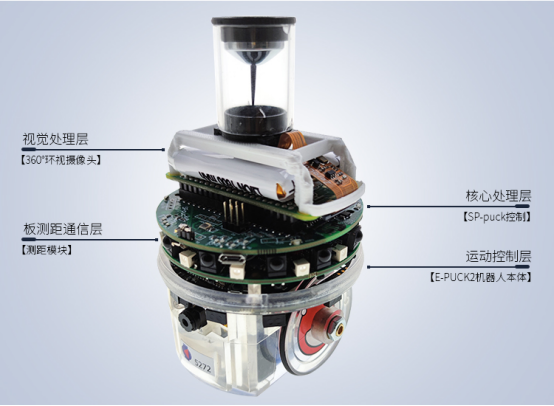
驱动控制层:负责机器人运动、状态显示和传感器数据采集等功能;
核心算法层:负责采集机器人运动控制层和通信层传回来的信息,通过进行数据分析与处理,进行复杂运算以及处理交互信息;
信息交互层:机器人彼此之间通过12组红外传感器实现与邻域机器人的通信,获得与邻域机器人的距离与方位信息;
视觉处理层:采集机器人周围图像信息,可以识别机器人或障碍物,以及进行场地边界识别等信息;
通过鲁棒四边形分布式网格定位法和信标定位法,所有机器人具有一致的共享坐标系,各个机器人在此坐标系内通过局部感知、自主决策、相互协调等完成特定任务。
群智能研究主要课题及方向
|
智能蚁群算法 |
人员自然流动算法 |
群居活动聚类算法 |
|
仿生机器人学优化算法 |
自主决策与远程控制算法 |
病毒传播模型算法 |
|
人工神经网络算法验证 |
粒子群优化算法 |
多机器人协同合作算法 |

E-PUCK2.3自主机器人介绍
通过提升E-PUCK2.0机器人配置,增加PI-puck核心控制板、红外测距模块以及360°环视摄像头,使得机器人具有强大的计算能力、近距离彼此位置感应能力、距离探测能力以及身份识别能力,为实现大规模分布式集群控制究提供硬件基础,可完成多机器人之间的编队与避碰控制。

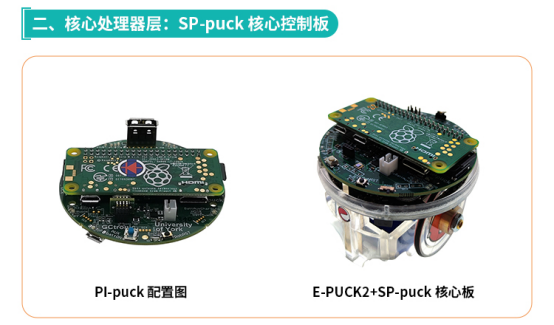
核心控制板配有树莓派zero w可以运行Linux操作系统,提升E-puck2机器人算力,可以验证神经网络算法研发。
技术参数:
|
采用树莓派Zero W核心处理器; |
配有16G micro SD; |
|
内置标准的Linux运行系统; |
2个RGB LED状态指示灯; |
|
1个数字麦克风; |
1个1W扬声器; |
|
支持充电墙自动充电和USB充电; |
6个I2C接口、2个ADC输入接口; |

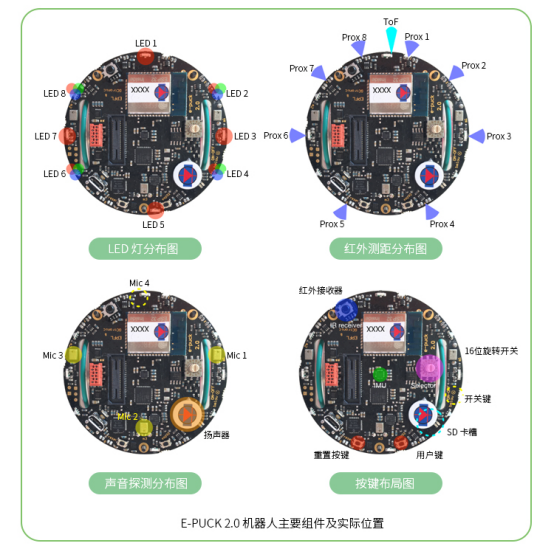
该模块包括12对红外发射与接收传感器,MAX感应距离可达80cm,可以在没有其他集中控制或外部定位设备控制的情况下,实现机器人对四周有效通信范围内的角度、距离感知,以及彼此信息交互。
技术参数:
|
采用MicroChip dsPIC33F系列核心处理器; |
12对红外发射/接收传感器; |
|
红外模块角度分配约30°; |
MAX 测距范围约80cm; |
|
支持I2C和RS232两种通讯模式; |
电压范围:2.5 V至6 V; |
|
1个TV Remote 接收器 ; |
1个档位选择开关; |

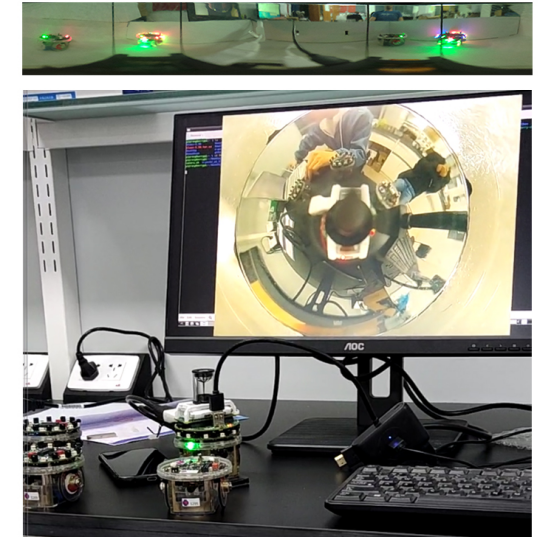
该模块通过彩色摄像头与”丁”字形抛物面镜结合,可采集360°范围内的机器人或物体等图像信息,实现斑点识别、图像追踪以及其他目标识别等任务。
技术参数:
|
VGA 彩色摄像头; |
360°环视抛物面镜; |
|
最高支持1080P 30fps; |
兼容Pi-puck连接树莓派Zero W; |
|
支持OpenCV图像处理、斑点、颜色和光线检测。 |
|
提供技术资料
二次开发:提供底层通讯协议和API接口,以及相关demo。
(1)提供机器人端与群体智能协作系统的通信协议。(2)提供机器人模块目标速度控制接口(3)提供机器人模块目标角度控制接口(4)提供机器人单体避障算法与demo(5)提供机器人群体队列保持算法demo(6)提供机器人跟随算法demo(7)协同感知算法demo
产品配置清单
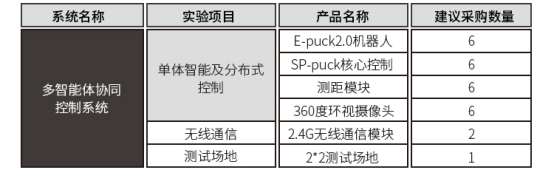
备注:可根据实验内容增减机器人数量!
群体智能实验案例
系统知识产权证书:

国内部分应用学校

视频链接:智能佳机器人的个人空间_哔哩哔哩_bilibili
购买咨询:单体/群体智能协同系列_轮式机器人_智能佳机器人专营店单体/群体智能协同系列【价格_图片_怎么样】- 智能佳机器人专营店 (jd.com)
智能佳机器人
400 099 1872
www.bjrobot.com

 浙公网安备 33010602011771号
浙公网安备 33010602011771号