机器人手通过感知形状来识别自己在抓什么
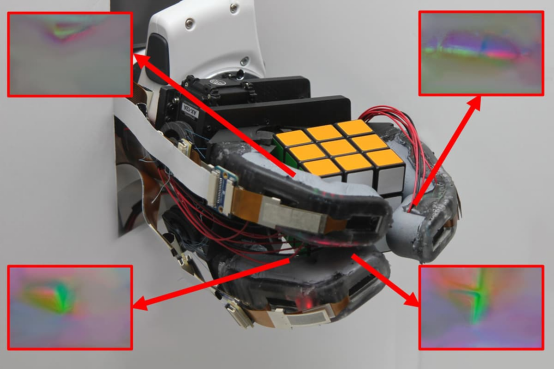
GelSight EndoFlex的手抓住一个魔方,镶嵌图显示了它的六个传感器中的四个是如何看到物体轮廓的 MIT
如果机器人要抓取精致的物体,那么机器人最好知道这些物体是什么,这样它就可以相应地处理它们。一种新的机械手可以通过感应物体三指长度的形状来做到这一点。
该实验装置由麻省理工学院的一组科学家开发,被称为GelSight EndoFlex。顾名思义,它融合了该大学的GelSight技术,该技术以前只用于机器人手的指尖垫。
EndoFlex的三个机械手指呈Y形排列——顶部有两个“手指”,底部有一个可相对的“拇指”。每一个都由一个铰接的硬质聚合物骨架组成,包裹在柔软的外层中。GelSight传感器本身——每个数字两个——位于这些数字的顶部和中间部分的下侧。
每个传感器都包含一块透明的合成橡胶,橡胶的一面涂有一层金属漆——这种漆就像手指的皮肤。当绘制被压在曲面上时,它会变形为该曲面的形状。从橡胶的另一侧看,一个微型集成相机(在三个彩色LED的帮助下)可以拍摄表面的微小轮廓,并将其压入油漆中。
连接计算机上的特殊算法将这些轮廓转换为3D图像,捕捉深度小于一微米、宽度约为两微米的细节。为了使表面的光学质量标准化,油漆是必要的,这样系统就不会被多种颜色或材料混淆。
在EndoFlex的情况下,通过同时组合来自六个这样的传感器的图像(三个手指中的每个手指上有两个),可以创建被抓取物品的三维模型。然后,在手只抓住物体一次之后,基于机器学习的软件就能够识别模型代表的物体。该系统目前的准确率约为85%,尽管随着技术的进一步发展,这个数字应该会有所提高。
机械工程研究生Sandra Liu与本科生Leonardo Zamora Yañez和教授共同领导了这项研究。
“我们这项工作的目标是将所有使我们的人手如此出色的东西结合成一个机器人手指,它可以完成其他机器人手指目前无法完成的任务。”
资料来源:麻省理工学院
智能佳机器人
www.bjrobot.com
400 099 1872
E shop:智能佳机器人专营店 - 京东 (jd.com)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号