受玩具启发的执行器可以让软机器人跳跃
受到波普尔启发的执行器飞向空中,David Melancon和Benjamin Gorissen /哈佛大学SEAS
还记得那些在您将它们推下后突然飞向空中的玩具吗?它们被称为波普尔(poppers),它们启发了一种执行器,该执行器有一天可以让软体机器人跳越崎terrain的地形。
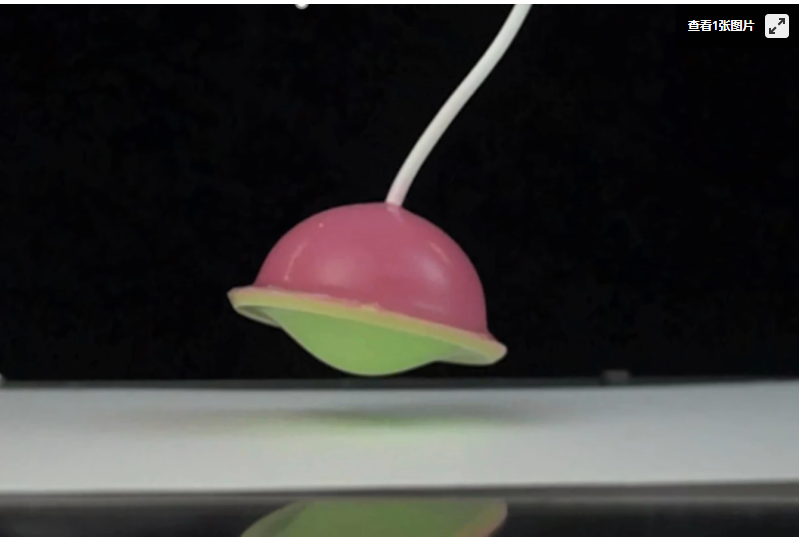
执行器由哈佛大学开发,由两个上下碗形的聚合物盖组成。两者中较大的一个位于顶部,较小的一个位于其中。两者之间有一个很小的气隙,而且它们在底部(沿着“碗”的“边缘”)连接在一起。
不需要时,执行器可以平放在地面上。但是,一旦需要跳跃,就可以使用集成软管将空气泵入两个盖之间的间隙中。由此产生的压力使顶部较大的盖子向上膨胀。
但是,与此同时,较小的底盖会弯曲并向下扩展,从凹形到凸形会迅速释放能量。此过程称为外壳屈曲,它导致盖被强行撞到地面,从而将整个执行器弹向空中。
跳跃完成后,气压将被释放,盖子再次弹回到执行器中。以此方式,配备有这种装置的机器人可以重复跳跃。
该研究论文的高级作者Katia Bertoldi教授说:“该执行器是一个模块,可以集成到一个完全软的机器人系统中,从而使已经可以爬行,行走和游泳的软机器人具有跳跃的能力。” “通过将跳线整合到这些设计中,这些机器人可以在未知的地形中安全地导航。”
资料来源:哈佛大学约翰·保尔森工程与应用科学学院
*文章仅用于学术交流与探讨,不做任何商业行为使用,著作权归原作者所有。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号