009-多线程-基础-AbstractQueuedSynchronizer-用于构建锁和同步容器的框架、独占锁与共享锁的获取与释放
一、概述
AbstractQueuedSynchronizer (简称AQS),位于java.util.concurrent.locks.AbstractQueuedSynchronizer包下,
AQS是一个用于构建锁和同步容器的框架。事实上concurrent包内许多类都是基于AQS构建,例如ReentrantLock,Semaphore,CountDownLatch,ReentrantReadWriteLock,FutureTask等。AQS解决了在实现同步容器时设计的大量细节问题。这些锁都有一个特点,都不是直接扩展自AQS,而是都有一个内部类继承自AQS。为什么会这么设计而不是直接继承呢?简而言之,锁面向的是使用者,同步器面向的是线程控制,在锁的实现中聚合同步器而不是直接继承AQS很好的隔离了二者所关注的领域。
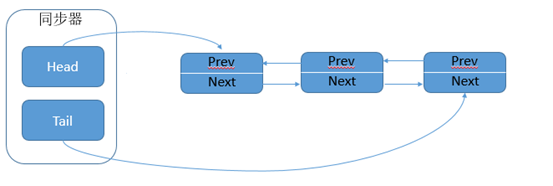
AQS使用一个FIFO的队列表示排队等待锁的线程,队列头节点称作“哨兵节点”或者“哑节点”,它不与任何线程关联。其他的节点与等待线程关联,每个节点维护一个等待状态waitStatus。
UML类图

二、源码分析


package java.util.concurrent.locks; import java.util.concurrent.TimeUnit; import java.util.ArrayList; import java.util.Collection; import java.util.Date; import sun.misc.Unsafe; /** * 提供一个框架,用于实现依赖先进先出(FIFO)等待队列的阻塞锁和相关同步器(信号量、事件等)。 * 此类被设计为大多数类型的同步器的有用基础,这些同步器依赖单个原子@code int值来表示状态。 * 子类必须定义更改此状态的受保护方法,以及定义此状态对于正在获取或释放的对象意味着什么。 * 考虑到这些,这个类中的其他方法执行所有排队和阻塞机制。 * 子类可以维护其他状态字段,但只有使用方法@link getstate、@link setstate和@link compareandsetstate对原子更新的@code int值进行同步跟踪。 **/ public abstract class AbstractQueuedSynchronizer extends AbstractOwnableSynchronizer implements java.io.Serializable { private static final long serialVersionUID = 7373984972572414691L; protected AbstractQueuedSynchronizer() { } /** * Wait queue node class. * * 等待队列是“clh”(craig、landin和hagersten)锁队列的变体。CLH锁通常用于旋转锁。 * 相反,我们使用它们来阻塞同步器,但是使用相同的基本策略来保存关于其节点前一个线程的一些控制信息。 * 每个节点中的“状态”字段跟踪线程是否应该阻塞。节点的前一个版本发布时会发出信号。 * 否则,队列的每个节点都充当一个特定的通知样式监控器,其中包含一个等待线程。但状态字段不控制是否授予线程锁等。 * 如果线程是队列中的第一个线程,它可能会尝试获取。但是,作为第一名并不能保证成功,它只给予竞争的权利。 * 因此,当前发布的竞争者线程可能需要重新等待。 * */ static final class Node { /** Marker to indicate a node is waiting in shared mode */ static final Node SHARED = new Node(); /** Marker to indicate a node is waiting in exclusive mode */ static final Node EXCLUSIVE = null; /** waitStatus value to indicate thread has cancelled */ static final int CANCELLED = 1; /** waitStatus value to indicate successor's thread needs unparking */ static final int SIGNAL = -1; /** waitStatus value to indicate thread is waiting on condition */ static final int CONDITION = -2; /** * waitStatus value to indicate the next acquireShared should * unconditionally propagate */ static final int PROPAGATE = -3; /** * Status field, taking on only the values: * SIGNAL: The successor of this node is (or will soon be) * blocked (via park), so the current node must * unpark its successor when it releases or * cancels. To avoid races, acquire methods must * first indicate they need a signal, * then retry the atomic acquire, and then, * on failure, block. * CANCELLED: This node is cancelled due to timeout or interrupt. * Nodes never leave this state. In particular, * a thread with cancelled node never again blocks. * CONDITION: This node is currently on a condition queue. * It will not be used as a sync queue node * until transferred, at which time the status * will be set to 0. (Use of this value here has * nothing to do with the other uses of the * field, but simplifies mechanics.) * PROPAGATE: A releaseShared should be propagated to other * nodes. This is set (for head node only) in * doReleaseShared to ensure propagation * continues, even if other operations have * since intervened. * 0: None of the above * * The values are arranged numerically to simplify use. * Non-negative values mean that a node doesn't need to * signal. So, most code doesn't need to check for particular * values, just for sign. * * The field is initialized to 0 for normal sync nodes, and * CONDITION for condition nodes. It is modified using CAS * (or when possible, unconditional volatile writes). */ volatile int waitStatus; /** * Link to predecessor node that current node/thread relies on * for checking waitStatus. Assigned during enqueuing, and nulled * out (for sake of GC) only upon dequeuing. Also, upon * cancellation of a predecessor, we short-circuit while * finding a non-cancelled one, which will always exist * because the head node is never cancelled: A node becomes * head only as a result of successful acquire. A * cancelled thread never succeeds in acquiring, and a thread only * cancels itself, not any other node. */ volatile Node prev; /** * Link to the successor node that the current node/thread * unparks upon release. Assigned during enqueuing, adjusted * when bypassing cancelled predecessors, and nulled out (for * sake of GC) when dequeued. The enq operation does not * assign next field of a predecessor until after attachment, * so seeing a null next field does not necessarily mean that * node is at end of queue. However, if a next field appears * to be null, we can scan prev's from the tail to * double-check. The next field of cancelled nodes is set to * point to the node itself instead of null, to make life * easier for isOnSyncQueue. */ volatile Node next; /** * The thread that enqueued this node. Initialized on * construction and nulled out after use. */ volatile Thread thread; /** * Link to next node waiting on condition, or the special * value SHARED. Because condition queues are accessed only * when holding in exclusive mode, we just need a simple * linked queue to hold nodes while they are waiting on * conditions. They are then transferred to the queue to * re-acquire. And because conditions can only be exclusive, * we save a field by using special value to indicate shared * mode. */ Node nextWaiter; /** * Returns true if node is waiting in shared mode. */ final boolean isShared() { return nextWaiter == SHARED; } /** * Returns previous node, or throws NullPointerException if null. * Use when predecessor cannot be null. The null check could * be elided, but is present to help the VM. * * @return the predecessor of this node */ final Node predecessor() throws NullPointerException { Node p = prev; if (p == null) throw new NullPointerException(); else return p; } Node() { // Used to establish initial head or SHARED marker } Node(Thread thread, Node mode) { // Used by addWaiter this.nextWaiter = mode; this.thread = thread; } Node(Thread thread, int waitStatus) { // Used by Condition this.waitStatus = waitStatus; this.thread = thread; } } /** * Head of the wait queue, lazily initialized. Except for * initialization, it is modified only via method setHead. Note: * If head exists, its waitStatus is guaranteed not to be * CANCELLED. */ private transient volatile Node head; /** * Tail of the wait queue, lazily initialized. Modified only via * method enq to add new wait node. */ private transient volatile Node tail; /** * The synchronization state. */ private volatile int state; /** * Returns the current value of synchronization state. * This operation has memory semantics of a {@code volatile} read. * @return current state value */ protected final int getState() { return state; } /** * Sets the value of synchronization state. * This operation has memory semantics of a {@code volatile} write. * @param newState the new state value */ protected final void setState(int newState) { state = newState; } /** * Atomically sets synchronization state to the given updated * value if the current state value equals the expected value. * This operation has memory semantics of a {@code volatile} read * and write. * * @param expect the expected value * @param update the new value * @return {@code true} if successful. False return indicates that the actual * value was not equal to the expected value. */ protected final boolean compareAndSetState(int expect, int update) { // See below for intrinsics setup to support this return unsafe.compareAndSwapInt(this, stateOffset, expect, update); } // Queuing utilities /** * The number of nanoseconds for which it is faster to spin * rather than to use timed park. A rough estimate suffices * to improve responsiveness with very short timeouts. */ static final long spinForTimeoutThreshold = 1000L; /** * Inserts node into queue, initializing if necessary. See picture above. * @param node the node to insert * @return node's predecessor */ private Node enq(final Node node) { for (;;) { Node t = tail; if (t == null) { // Must initialize if (compareAndSetHead(new Node())) tail = head; } else { node.prev = t; if (compareAndSetTail(t, node)) { t.next = node; return t; } } } } /** * Creates and enqueues node for current thread and given mode. * * @param mode Node.EXCLUSIVE for exclusive, Node.SHARED for shared * @return the new node */ private Node addWaiter(Node mode) { Node node = new Node(Thread.currentThread(), mode); // Try the fast path of enq; backup to full enq on failure Node pred = tail; if (pred != null) { node.prev = pred; if (compareAndSetTail(pred, node)) { pred.next = node; return node; } } enq(node); return node; } /** * Sets head of queue to be node, thus dequeuing. Called only by * acquire methods. Also nulls out unused fields for sake of GC * and to suppress unnecessary signals and traversals. * * @param node the node */ private void setHead(Node node) { head = node; node.thread = null; node.prev = null; } /** * Wakes up node's successor, if one exists. * * @param node the node */ private void unparkSuccessor(Node node) { /* * If status is negative (i.e., possibly needing signal) try * to clear in anticipation of signalling. It is OK if this * fails or if status is changed by waiting thread. */ int ws = node.waitStatus; if (ws < 0) compareAndSetWaitStatus(node, ws, 0); /* * Thread to unpark is held in successor, which is normally * just the next node. But if cancelled or apparently null, * traverse backwards from tail to find the actual * non-cancelled successor. */ Node s = node.next; if (s == null || s.waitStatus > 0) { s = null; for (Node t = tail; t != null && t != node; t = t.prev) if (t.waitStatus <= 0) s = t; } if (s != null) LockSupport.unpark(s.thread); } /** * Release action for shared mode -- signals successor and ensures * propagation. (Note: For exclusive mode, release just amounts * to calling unparkSuccessor of head if it needs signal.) */ private void doReleaseShared() { /* * Ensure that a release propagates, even if there are other * in-progress acquires/releases. This proceeds in the usual * way of trying to unparkSuccessor of head if it needs * signal. But if it does not, status is set to PROPAGATE to * ensure that upon release, propagation continues. * Additionally, we must loop in case a new node is added * while we are doing this. Also, unlike other uses of * unparkSuccessor, we need to know if CAS to reset status * fails, if so rechecking. */ for (;;) { Node h = head; if (h != null && h != tail) { int ws = h.waitStatus; if (ws == Node.SIGNAL) { if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0)) continue; // loop to recheck cases unparkSuccessor(h); } else if (ws == 0 && !compareAndSetWaitStatus(h, 0, Node.PROPAGATE)) continue; // loop on failed CAS } if (h == head) // loop if head changed break; } } /** * Sets head of queue, and checks if successor may be waiting * in shared mode, if so propagating if either propagate > 0 or * PROPAGATE status was set. * * @param node the node * @param propagate the return value from a tryAcquireShared */ private void setHeadAndPropagate(Node node, int propagate) { Node h = head; // Record old head for check below setHead(node); /* * Try to signal next queued node if: * Propagation was indicated by caller, * or was recorded (as h.waitStatus either before * or after setHead) by a previous operation * (note: this uses sign-check of waitStatus because * PROPAGATE status may transition to SIGNAL.) * and * The next node is waiting in shared mode, * or we don't know, because it appears null * * The conservatism in both of these checks may cause * unnecessary wake-ups, but only when there are multiple * racing acquires/releases, so most need signals now or soon * anyway. */ if (propagate > 0 || h == null || h.waitStatus < 0 || (h = head) == null || h.waitStatus < 0) { Node s = node.next; if (s == null || s.isShared()) doReleaseShared(); } } // Utilities for various versions of acquire /** * Cancels an ongoing attempt to acquire. * * @param node the node */ private void cancelAcquire(Node node) { // Ignore if node doesn't exist if (node == null) return; node.thread = null; // Skip cancelled predecessors Node pred = node.prev; while (pred.waitStatus > 0) node.prev = pred = pred.prev; // predNext is the apparent node to unsplice. CASes below will // fail if not, in which case, we lost race vs another cancel // or signal, so no further action is necessary. Node predNext = pred.next; // Can use unconditional write instead of CAS here. // After this atomic step, other Nodes can skip past us. // Before, we are free of interference from other threads. node.waitStatus = Node.CANCELLED; // If we are the tail, remove ourselves. if (node == tail && compareAndSetTail(node, pred)) { compareAndSetNext(pred, predNext, null); } else { // If successor needs signal, try to set pred's next-link // so it will get one. Otherwise wake it up to propagate. int ws; if (pred != head && ((ws = pred.waitStatus) == Node.SIGNAL || (ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) && pred.thread != null) { Node next = node.next; if (next != null && next.waitStatus <= 0) compareAndSetNext(pred, predNext, next); } else { unparkSuccessor(node); } node.next = node; // help GC } } /** * Checks and updates status for a node that failed to acquire. * Returns true if thread should block. This is the main signal * control in all acquire loops. Requires that pred == node.prev. * * @param pred node's predecessor holding status * @param node the node * @return {@code true} if thread should block */ private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) { int ws = pred.waitStatus; if (ws == Node.SIGNAL) /* * This node has already set status asking a release * to signal it, so it can safely park. */ return true; if (ws > 0) { /* * Predecessor was cancelled. Skip over predecessors and * indicate retry. */ do { node.prev = pred = pred.prev; } while (pred.waitStatus > 0); pred.next = node; } else { /* * waitStatus must be 0 or PROPAGATE. Indicate that we * need a signal, but don't park yet. Caller will need to * retry to make sure it cannot acquire before parking. */ compareAndSetWaitStatus(pred, ws, Node.SIGNAL); } return false; } /** * Convenience method to interrupt current thread. */ static void selfInterrupt() { Thread.currentThread().interrupt(); } /** * Convenience method to park and then check if interrupted * * @return {@code true} if interrupted */ private final boolean parkAndCheckInterrupt() { LockSupport.park(this); return Thread.interrupted(); } /* * Various flavors of acquire, varying in exclusive/shared and * control modes. Each is mostly the same, but annoyingly * different. Only a little bit of factoring is possible due to * interactions of exception mechanics (including ensuring that we * cancel if tryAcquire throws exception) and other control, at * least not without hurting performance too much. */ /** * Acquires in exclusive uninterruptible mode for thread already in * queue. Used by condition wait methods as well as acquire. * * @param node the node * @param arg the acquire argument * @return {@code true} if interrupted while waiting */ final boolean acquireQueued(final Node node, int arg) { boolean failed = true; try { boolean interrupted = false; for (;;) { final Node p = node.predecessor(); if (p == head && tryAcquire(arg)) { setHead(node); p.next = null; // help GC failed = false; return interrupted; } if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) interrupted = true; } } finally { if (failed) cancelAcquire(node); } } /** * Acquires in exclusive interruptible mode. * @param arg the acquire argument */ private void doAcquireInterruptibly(int arg) throws InterruptedException { final Node node = addWaiter(Node.EXCLUSIVE); boolean failed = true; try { for (;;) { final Node p = node.predecessor(); if (p == head && tryAcquire(arg)) { setHead(node); p.next = null; // help GC failed = false; return; } if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) throw new InterruptedException(); } } finally { if (failed) cancelAcquire(node); } } /** * Acquires in exclusive timed mode. * * @param arg the acquire argument * @param nanosTimeout max wait time * @return {@code true} if acquired */ private boolean doAcquireNanos(int arg, long nanosTimeout) throws InterruptedException { if (nanosTimeout <= 0L) return false; final long deadline = System.nanoTime() + nanosTimeout; final Node node = addWaiter(Node.EXCLUSIVE); boolean failed = true; try { for (;;) { final Node p = node.predecessor(); if (p == head && tryAcquire(arg)) { setHead(node); p.next = null; // help GC failed = false; return true; } nanosTimeout = deadline - System.nanoTime(); if (nanosTimeout <= 0L) return false; if (shouldParkAfterFailedAcquire(p, node) && nanosTimeout > spinForTimeoutThreshold) LockSupport.parkNanos(this, nanosTimeout); if (Thread.interrupted()) throw new InterruptedException(); } } finally { if (failed) cancelAcquire(node); } } /** * Acquires in shared uninterruptible mode. * @param arg the acquire argument */ private void doAcquireShared(int arg) { final Node node = addWaiter(Node.SHARED); boolean failed = true; try { boolean interrupted = false; for (;;) { final Node p = node.predecessor(); if (p == head) { int r = tryAcquireShared(arg); if (r >= 0) { setHeadAndPropagate(node, r); p.next = null; // help GC if (interrupted) selfInterrupt(); failed = false; return; } } if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) interrupted = true; } } finally { if (failed) cancelAcquire(node); } } /** * Acquires in shared interruptible mode. * @param arg the acquire argument */ private void doAcquireSharedInterruptibly(int arg) throws InterruptedException { final Node node = addWaiter(Node.SHARED); boolean failed = true; try { for (;;) { final Node p = node.predecessor(); if (p == head) { int r = tryAcquireShared(arg); if (r >= 0) { setHeadAndPropagate(node, r); p.next = null; // help GC failed = false; return; } } if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) throw new InterruptedException(); } } finally { if (failed) cancelAcquire(node); } } /** * Acquires in shared timed mode. * * @param arg the acquire argument * @param nanosTimeout max wait time * @return {@code true} if acquired */ private boolean doAcquireSharedNanos(int arg, long nanosTimeout) throws InterruptedException { if (nanosTimeout <= 0L) return false; final long deadline = System.nanoTime() + nanosTimeout; final Node node = addWaiter(Node.SHARED); boolean failed = true; try { for (;;) { final Node p = node.predecessor(); if (p == head) { int r = tryAcquireShared(arg); if (r >= 0) { setHeadAndPropagate(node, r); p.next = null; // help GC failed = false; return true; } } nanosTimeout = deadline - System.nanoTime(); if (nanosTimeout <= 0L) return false; if (shouldParkAfterFailedAcquire(p, node) && nanosTimeout > spinForTimeoutThreshold) LockSupport.parkNanos(this, nanosTimeout); if (Thread.interrupted()) throw new InterruptedException(); } } finally { if (failed) cancelAcquire(node); } } // Main exported methods /** * Attempts to acquire in exclusive mode. This method should query * if the state of the object permits it to be acquired in the * exclusive mode, and if so to acquire it. * * <p>This method is always invoked by the thread performing * acquire. If this method reports failure, the acquire method * may queue the thread, if it is not already queued, until it is * signalled by a release from some other thread. This can be used * to implement method {@link Lock#tryLock()}. * * <p>The default * implementation throws {@link UnsupportedOperationException}. * * @param arg the acquire argument. This value is always the one * passed to an acquire method, or is the value saved on entry * to a condition wait. The value is otherwise uninterpreted * and can represent anything you like. * @return {@code true} if successful. Upon success, this object has * been acquired. * @throws IllegalMonitorStateException if acquiring would place this * synchronizer in an illegal state. This exception must be * thrown in a consistent fashion for synchronization to work * correctly. * @throws UnsupportedOperationException if exclusive mode is not supported */ protected boolean tryAcquire(int arg) { throw new UnsupportedOperationException(); } /** * Attempts to set the state to reflect a release in exclusive * mode. * * <p>This method is always invoked by the thread performing release. * * <p>The default implementation throws * {@link UnsupportedOperationException}. * * @param arg the release argument. This value is always the one * passed to a release method, or the current state value upon * entry to a condition wait. The value is otherwise * uninterpreted and can represent anything you like. * @return {@code true} if this object is now in a fully released * state, so that any waiting threads may attempt to acquire; * and {@code false} otherwise. * @throws IllegalMonitorStateException if releasing would place this * synchronizer in an illegal state. This exception must be * thrown in a consistent fashion for synchronization to work * correctly. * @throws UnsupportedOperationException if exclusive mode is not supported */ protected boolean tryRelease(int arg) { throw new UnsupportedOperationException(); } /** * Attempts to acquire in shared mode. This method should query if * the state of the object permits it to be acquired in the shared * mode, and if so to acquire it. * * <p>This method is always invoked by the thread performing * acquire. If this method reports failure, the acquire method * may queue the thread, if it is not already queued, until it is * signalled by a release from some other thread. * * <p>The default implementation throws {@link * UnsupportedOperationException}. * * @param arg the acquire argument. This value is always the one * passed to an acquire method, or is the value saved on entry * to a condition wait. The value is otherwise uninterpreted * and can represent anything you like. * @return a negative value on failure; zero if acquisition in shared * mode succeeded but no subsequent shared-mode acquire can * succeed; and a positive value if acquisition in shared * mode succeeded and subsequent shared-mode acquires might * also succeed, in which case a subsequent waiting thread * must check availability. (Support for three different * return values enables this method to be used in contexts * where acquires only sometimes act exclusively.) Upon * success, this object has been acquired. * @throws IllegalMonitorStateException if acquiring would place this * synchronizer in an illegal state. This exception must be * thrown in a consistent fashion for synchronization to work * correctly. * @throws UnsupportedOperationException if shared mode is not supported */ protected int tryAcquireShared(int arg) { throw new UnsupportedOperationException(); } /** * Attempts to set the state to reflect a release in shared mode. * * <p>This method is always invoked by the thread performing release. * * <p>The default implementation throws * {@link UnsupportedOperationException}. * * @param arg the release argument. This value is always the one * passed to a release method, or the current state value upon * entry to a condition wait. The value is otherwise * uninterpreted and can represent anything you like. * @return {@code true} if this release of shared mode may permit a * waiting acquire (shared or exclusive) to succeed; and * {@code false} otherwise * @throws IllegalMonitorStateException if releasing would place this * synchronizer in an illegal state. This exception must be * thrown in a consistent fashion for synchronization to work * correctly. * @throws UnsupportedOperationException if shared mode is not supported */ protected boolean tryReleaseShared(int arg) { throw new UnsupportedOperationException(); } /** * Returns {@code true} if synchronization is held exclusively with * respect to the current (calling) thread. This method is invoked * upon each call to a non-waiting {@link ConditionObject} method. * (Waiting methods instead invoke {@link #release}.) * * <p>The default implementation throws {@link * UnsupportedOperationException}. This method is invoked * internally only within {@link ConditionObject} methods, so need * not be defined if conditions are not used. * * @return {@code true} if synchronization is held exclusively; * {@code false} otherwise * @throws UnsupportedOperationException if conditions are not supported */ protected boolean isHeldExclusively() { throw new UnsupportedOperationException(); } /** * Acquires in exclusive mode, ignoring interrupts. Implemented * by invoking at least once {@link #tryAcquire}, * returning on success. Otherwise the thread is queued, possibly * repeatedly blocking and unblocking, invoking {@link * #tryAcquire} until success. This method can be used * to implement method {@link Lock#lock}. * * @param arg the acquire argument. This value is conveyed to * {@link #tryAcquire} but is otherwise uninterpreted and * can represent anything you like. */ public final void acquire(int arg) { if (!tryAcquire(arg) && acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) selfInterrupt(); } /** * Acquires in exclusive mode, aborting if interrupted. * Implemented by first checking interrupt status, then invoking * at least once {@link #tryAcquire}, returning on * success. Otherwise the thread is queued, possibly repeatedly * blocking and unblocking, invoking {@link #tryAcquire} * until success or the thread is interrupted. This method can be * used to implement method {@link Lock#lockInterruptibly}. * * @param arg the acquire argument. This value is conveyed to * {@link #tryAcquire} but is otherwise uninterpreted and * can represent anything you like. * @throws InterruptedException if the current thread is interrupted */ public final void acquireInterruptibly(int arg) throws InterruptedException { if (Thread.interrupted()) throw new InterruptedException(); if (!tryAcquire(arg)) doAcquireInterruptibly(arg); } /** * Attempts to acquire in exclusive mode, aborting if interrupted, * and failing if the given timeout elapses. Implemented by first * checking interrupt status, then invoking at least once {@link * #tryAcquire}, returning on success. Otherwise, the thread is * queued, possibly repeatedly blocking and unblocking, invoking * {@link #tryAcquire} until success or the thread is interrupted * or the timeout elapses. This method can be used to implement * method {@link Lock#tryLock(long, TimeUnit)}. * * @param arg the acquire argument. This value is conveyed to * {@link #tryAcquire} but is otherwise uninterpreted and * can represent anything you like. * @param nanosTimeout the maximum number of nanoseconds to wait * @return {@code true} if acquired; {@code false} if timed out * @throws InterruptedException if the current thread is interrupted */ public final boolean tryAcquireNanos(int arg, long nanosTimeout) throws InterruptedException { if (Thread.interrupted()) throw new InterruptedException(); return tryAcquire(arg) || doAcquireNanos(arg, nanosTimeout); } /** * Releases in exclusive mode. Implemented by unblocking one or * more threads if {@link #tryRelease} returns true. * This method can be used to implement method {@link Lock#unlock}. * * @param arg the release argument. This value is conveyed to * {@link #tryRelease} but is otherwise uninterpreted and * can represent anything you like. * @return the value returned from {@link #tryRelease} */ public final boolean release(int arg) { if (tryRelease(arg)) { Node h = head; if (h != null && h.waitStatus != 0) unparkSuccessor(h); return true; } return false; } /** * Acquires in shared mode, ignoring interrupts. Implemented by * first invoking at least once {@link #tryAcquireShared}, * returning on success. Otherwise the thread is queued, possibly * repeatedly blocking and unblocking, invoking {@link * #tryAcquireShared} until success. * * @param arg the acquire argument. This value is conveyed to * {@link #tryAcquireShared} but is otherwise uninterpreted * and can represent anything you like. */ public final void acquireShared(int arg) { if (tryAcquireShared(arg) < 0) doAcquireShared(arg); } /** * Acquires in shared mode, aborting if interrupted. Implemented * by first checking interrupt status, then invoking at least once * {@link #tryAcquireShared}, returning on success. Otherwise the * thread is queued, possibly repeatedly blocking and unblocking, * invoking {@link #tryAcquireShared} until success or the thread * is interrupted. * @param arg the acquire argument. * This value is conveyed to {@link #tryAcquireShared} but is * otherwise uninterpreted and can represent anything * you like. * @throws InterruptedException if the current thread is interrupted */ public final void acquireSharedInterruptibly(int arg) throws InterruptedException { if (Thread.interrupted()) throw new InterruptedException(); if (tryAcquireShared(arg) < 0) doAcquireSharedInterruptibly(arg); } /** * Attempts to acquire in shared mode, aborting if interrupted, and * failing if the given timeout elapses. Implemented by first * checking interrupt status, then invoking at least once {@link * #tryAcquireShared}, returning on success. Otherwise, the * thread is queued, possibly repeatedly blocking and unblocking, * invoking {@link #tryAcquireShared} until success or the thread * is interrupted or the timeout elapses. * * @param arg the acquire argument. This value is conveyed to * {@link #tryAcquireShared} but is otherwise uninterpreted * and can represent anything you like. * @param nanosTimeout the maximum number of nanoseconds to wait * @return {@code true} if acquired; {@code false} if timed out * @throws InterruptedException if the current thread is interrupted */ public final boolean tryAcquireSharedNanos(int arg, long nanosTimeout) throws InterruptedException { if (Thread.interrupted()) throw new InterruptedException(); return tryAcquireShared(arg) >= 0 || doAcquireSharedNanos(arg, nanosTimeout); } /** * Releases in shared mode. Implemented by unblocking one or more * threads if {@link #tryReleaseShared} returns true. * * @param arg the release argument. This value is conveyed to * {@link #tryReleaseShared} but is otherwise uninterpreted * and can represent anything you like. * @return the value returned from {@link #tryReleaseShared} */ public final boolean releaseShared(int arg) { if (tryReleaseShared(arg)) { doReleaseShared(); return true; } return false; } // Queue inspection methods /** * Queries whether any threads are waiting to acquire. Note that * because cancellations due to interrupts and timeouts may occur * at any time, a {@code true} return does not guarantee that any * other thread will ever acquire. * * <p>In this implementation, this operation returns in * constant time. * * @return {@code true} if there may be other threads waiting to acquire */ public final boolean hasQueuedThreads() { return head != tail; } /** * Queries whether any threads have ever contended to acquire this * synchronizer; that is if an acquire method has ever blocked. * * <p>In this implementation, this operation returns in * constant time. * * @return {@code true} if there has ever been contention */ public final boolean hasContended() { return head != null; } /** * Returns the first (longest-waiting) thread in the queue, or * {@code null} if no threads are currently queued. * * <p>In this implementation, this operation normally returns in * constant time, but may iterate upon contention if other threads are * concurrently modifying the queue. * * @return the first (longest-waiting) thread in the queue, or * {@code null} if no threads are currently queued */ public final Thread getFirstQueuedThread() { // handle only fast path, else relay return (head == tail) ? null : fullGetFirstQueuedThread(); } /** * Version of getFirstQueuedThread called when fastpath fails */ private Thread fullGetFirstQueuedThread() { /* * The first node is normally head.next. Try to get its * thread field, ensuring consistent reads: If thread * field is nulled out or s.prev is no longer head, then * some other thread(s) concurrently performed setHead in * between some of our reads. We try this twice before * resorting to traversal. */ Node h, s; Thread st; if (((h = head) != null && (s = h.next) != null && s.prev == head && (st = s.thread) != null) || ((h = head) != null && (s = h.next) != null && s.prev == head && (st = s.thread) != null)) return st; /* * Head's next field might not have been set yet, or may have * been unset after setHead. So we must check to see if tail * is actually first node. If not, we continue on, safely * traversing from tail back to head to find first, * guaranteeing termination. */ Node t = tail; Thread firstThread = null; while (t != null && t != head) { Thread tt = t.thread; if (tt != null) firstThread = tt; t = t.prev; } return firstThread; } /** * Returns true if the given thread is currently queued. * * <p>This implementation traverses the queue to determine * presence of the given thread. * * @param thread the thread * @return {@code true} if the given thread is on the queue * @throws NullPointerException if the thread is null */ public final boolean isQueued(Thread thread) { if (thread == null) throw new NullPointerException(); for (Node p = tail; p != null; p = p.prev) if (p.thread == thread) return true; return false; } /** * Returns {@code true} if the apparent first queued thread, if one * exists, is waiting in exclusive mode. If this method returns * {@code true}, and the current thread is attempting to acquire in * shared mode (that is, this method is invoked from {@link * #tryAcquireShared}) then it is guaranteed that the current thread * is not the first queued thread. Used only as a heuristic in * ReentrantReadWriteLock. */ final boolean apparentlyFirstQueuedIsExclusive() { Node h, s; return (h = head) != null && (s = h.next) != null && !s.isShared() && s.thread != null; } /** * Queries whether any threads have been waiting to acquire longer * than the current thread. * * <p>An invocation of this method is equivalent to (but may be * more efficient than): * <pre> {@code * getFirstQueuedThread() != Thread.currentThread() && * hasQueuedThreads()}</pre> * * <p>Note that because cancellations due to interrupts and * timeouts may occur at any time, a {@code true} return does not * guarantee that some other thread will acquire before the current * thread. Likewise, it is possible for another thread to win a * race to enqueue after this method has returned {@code false}, * due to the queue being empty. * * <p>This method is designed to be used by a fair synchronizer to * avoid <a href="AbstractQueuedSynchronizer#barging">barging</a>. * Such a synchronizer's {@link #tryAcquire} method should return * {@code false}, and its {@link #tryAcquireShared} method should * return a negative value, if this method returns {@code true} * (unless this is a reentrant acquire). For example, the {@code * tryAcquire} method for a fair, reentrant, exclusive mode * synchronizer might look like this: * * <pre> {@code * protected boolean tryAcquire(int arg) { * if (isHeldExclusively()) { * // A reentrant acquire; increment hold count * return true; * } else if (hasQueuedPredecessors()) { * return false; * } else { * // try to acquire normally * } * }}</pre> * * @return {@code true} if there is a queued thread preceding the * current thread, and {@code false} if the current thread * is at the head of the queue or the queue is empty * @since 1.7 */ public final boolean hasQueuedPredecessors() { // The correctness of this depends on head being initialized // before tail and on head.next being accurate if the current // thread is first in queue. Node t = tail; // Read fields in reverse initialization order Node h = head; Node s; return h != t && ((s = h.next) == null || s.thread != Thread.currentThread()); } // Instrumentation and monitoring methods /** * Returns an estimate of the number of threads waiting to * acquire. The value is only an estimate because the number of * threads may change dynamically while this method traverses * internal data structures. This method is designed for use in * monitoring system state, not for synchronization * control. * * @return the estimated number of threads waiting to acquire */ public final int getQueueLength() { int n = 0; for (Node p = tail; p != null; p = p.prev) { if (p.thread != null) ++n; } return n; } /** * Returns a collection containing threads that may be waiting to * acquire. Because the actual set of threads may change * dynamically while constructing this result, the returned * collection is only a best-effort estimate. The elements of the * returned collection are in no particular order. This method is * designed to facilitate construction of subclasses that provide * more extensive monitoring facilities. * * @return the collection of threads */ public final Collection<Thread> getQueuedThreads() { ArrayList<Thread> list = new ArrayList<Thread>(); for (Node p = tail; p != null; p = p.prev) { Thread t = p.thread; if (t != null) list.add(t); } return list; } /** * Returns a collection containing threads that may be waiting to * acquire in exclusive mode. This has the same properties * as {@link #getQueuedThreads} except that it only returns * those threads waiting due to an exclusive acquire. * * @return the collection of threads */ public final Collection<Thread> getExclusiveQueuedThreads() { ArrayList<Thread> list = new ArrayList<Thread>(); for (Node p = tail; p != null; p = p.prev) { if (!p.isShared()) { Thread t = p.thread; if (t != null) list.add(t); } } return list; } /** * Returns a collection containing threads that may be waiting to * acquire in shared mode. This has the same properties * as {@link #getQueuedThreads} except that it only returns * those threads waiting due to a shared acquire. * * @return the collection of threads */ public final Collection<Thread> getSharedQueuedThreads() { ArrayList<Thread> list = new ArrayList<Thread>(); for (Node p = tail; p != null; p = p.prev) { if (p.isShared()) { Thread t = p.thread; if (t != null) list.add(t); } } return list; } /** * Returns a string identifying this synchronizer, as well as its state. * The state, in brackets, includes the String {@code "State ="} * followed by the current value of {@link #getState}, and either * {@code "nonempty"} or {@code "empty"} depending on whether the * queue is empty. * * @return a string identifying this synchronizer, as well as its state */ public String toString() { int s = getState(); String q = hasQueuedThreads() ? "non" : ""; return super.toString() + "[State = " + s + ", " + q + "empty queue]"; } // Internal support methods for Conditions /** * Returns true if a node, always one that was initially placed on * a condition queue, is now waiting to reacquire on sync queue. * @param node the node * @return true if is reacquiring */ final boolean isOnSyncQueue(Node node) { if (node.waitStatus == Node.CONDITION || node.prev == null) return false; if (node.next != null) // If has successor, it must be on queue return true; /* * node.prev can be non-null, but not yet on queue because * the CAS to place it on queue can fail. So we have to * traverse from tail to make sure it actually made it. It * will always be near the tail in calls to this method, and * unless the CAS failed (which is unlikely), it will be * there, so we hardly ever traverse much. */ return findNodeFromTail(node); } /** * Returns true if node is on sync queue by searching backwards from tail. * Called only when needed by isOnSyncQueue. * @return true if present */ private boolean findNodeFromTail(Node node) { Node t = tail; for (;;) { if (t == node) return true; if (t == null) return false; t = t.prev; } } /** * Transfers a node from a condition queue onto sync queue. * Returns true if successful. * @param node the node * @return true if successfully transferred (else the node was * cancelled before signal) */ final boolean transferForSignal(Node node) { /* * If cannot change waitStatus, the node has been cancelled. */ if (!compareAndSetWaitStatus(node, Node.CONDITION, 0)) return false; /* * Splice onto queue and try to set waitStatus of predecessor to * indicate that thread is (probably) waiting. If cancelled or * attempt to set waitStatus fails, wake up to resync (in which * case the waitStatus can be transiently and harmlessly wrong). */ Node p = enq(node); int ws = p.waitStatus; if (ws > 0 || !compareAndSetWaitStatus(p, ws, Node.SIGNAL)) LockSupport.unpark(node.thread); return true; } /** * Transfers node, if necessary, to sync queue after a cancelled wait. * Returns true if thread was cancelled before being signalled. * * @param node the node * @return true if cancelled before the node was signalled */ final boolean transferAfterCancelledWait(Node node) { if (compareAndSetWaitStatus(node, Node.CONDITION, 0)) { enq(node); return true; } /* * If we lost out to a signal(), then we can't proceed * until it finishes its enq(). Cancelling during an * incomplete transfer is both rare and transient, so just * spin. */ while (!isOnSyncQueue(node)) Thread.yield(); return false; } /** * Invokes release with current state value; returns saved state. * Cancels node and throws exception on failure. * @param node the condition node for this wait * @return previous sync state */ final int fullyRelease(Node node) { boolean failed = true; try { int savedState = getState(); if (release(savedState)) { failed = false; return savedState; } else { throw new IllegalMonitorStateException(); } } finally { if (failed) node.waitStatus = Node.CANCELLED; } } // Instrumentation methods for conditions /** * Queries whether the given ConditionObject * uses this synchronizer as its lock. * * @param condition the condition * @return {@code true} if owned * @throws NullPointerException if the condition is null */ public final boolean owns(ConditionObject condition) { return condition.isOwnedBy(this); } /** * Queries whether any threads are waiting on the given condition * associated with this synchronizer. Note that because timeouts * and interrupts may occur at any time, a {@code true} return * does not guarantee that a future {@code signal} will awaken * any threads. This method is designed primarily for use in * monitoring of the system state. * * @param condition the condition * @return {@code true} if there are any waiting threads * @throws IllegalMonitorStateException if exclusive synchronization * is not held * @throws IllegalArgumentException if the given condition is * not associated with this synchronizer * @throws NullPointerException if the condition is null */ public final boolean hasWaiters(ConditionObject condition) { if (!owns(condition)) throw new IllegalArgumentException("Not owner"); return condition.hasWaiters(); } /** * Returns an estimate of the number of threads waiting on the * given condition associated with this synchronizer. Note that * because timeouts and interrupts may occur at any time, the * estimate serves only as an upper bound on the actual number of * waiters. This method is designed for use in monitoring of the * system state, not for synchronization control. * * @param condition the condition * @return the estimated number of waiting threads * @throws IllegalMonitorStateException if exclusive synchronization * is not held * @throws IllegalArgumentException if the given condition is * not associated with this synchronizer * @throws NullPointerException if the condition is null */ public final int getWaitQueueLength(ConditionObject condition) { if (!owns(condition)) throw new IllegalArgumentException("Not owner"); return condition.getWaitQueueLength(); } /** * Returns a collection containing those threads that may be * waiting on the given condition associated with this * synchronizer. Because the actual set of threads may change * dynamically while constructing this result, the returned * collection is only a best-effort estimate. The elements of the * returned collection are in no particular order. * * @param condition the condition * @return the collection of threads * @throws IllegalMonitorStateException if exclusive synchronization * is not held * @throws IllegalArgumentException if the given condition is * not associated with this synchronizer * @throws NullPointerException if the condition is null */ public final Collection<Thread> getWaitingThreads(ConditionObject condition) { if (!owns(condition)) throw new IllegalArgumentException("Not owner"); return condition.getWaitingThreads(); } /** * Condition implementation for a {@link * AbstractQueuedSynchronizer} serving as the basis of a {@link * Lock} implementation. * * <p>Method documentation for this class describes mechanics, * not behavioral specifications from the point of view of Lock * and Condition users. Exported versions of this class will in * general need to be accompanied by documentation describing * condition semantics that rely on those of the associated * {@code AbstractQueuedSynchronizer}. * * <p>This class is Serializable, but all fields are transient, * so deserialized conditions have no waiters. */ public class ConditionObject implements Condition, java.io.Serializable { private static final long serialVersionUID = 1173984872572414699L; /** First node of condition queue. */ private transient Node firstWaiter; /** Last node of condition queue. */ private transient Node lastWaiter; /** * Creates a new {@code ConditionObject} instance. */ public ConditionObject() { } // Internal methods /** * Adds a new waiter to wait queue. * @return its new wait node */ private Node addConditionWaiter() { Node t = lastWaiter; // If lastWaiter is cancelled, clean out. if (t != null && t.waitStatus != Node.CONDITION) { unlinkCancelledWaiters(); t = lastWaiter; } Node node = new Node(Thread.currentThread(), Node.CONDITION); if (t == null) firstWaiter = node; else t.nextWaiter = node; lastWaiter = node; return node; } /** * Removes and transfers nodes until hit non-cancelled one or * null. Split out from signal in part to encourage compilers * to inline the case of no waiters. * @param first (non-null) the first node on condition queue */ private void doSignal(Node first) { do { if ( (firstWaiter = first.nextWaiter) == null) lastWaiter = null; first.nextWaiter = null; } while (!transferForSignal(first) && (first = firstWaiter) != null); } /** * Removes and transfers all nodes. * @param first (non-null) the first node on condition queue */ private void doSignalAll(Node first) { lastWaiter = firstWaiter = null; do { Node next = first.nextWaiter; first.nextWaiter = null; transferForSignal(first); first = next; } while (first != null); } /** * Unlinks cancelled waiter nodes from condition queue. * Called only while holding lock. This is called when * cancellation occurred during condition wait, and upon * insertion of a new waiter when lastWaiter is seen to have * been cancelled. This method is needed to avoid garbage * retention in the absence of signals. So even though it may * require a full traversal, it comes into play only when * timeouts or cancellations occur in the absence of * signals. It traverses all nodes rather than stopping at a * particular target to unlink all pointers to garbage nodes * without requiring many re-traversals during cancellation * storms. */ private void unlinkCancelledWaiters() { Node t = firstWaiter; Node trail = null; while (t != null) { Node next = t.nextWaiter; if (t.waitStatus != Node.CONDITION) { t.nextWaiter = null; if (trail == null) firstWaiter = next; else trail.nextWaiter = next; if (next == null) lastWaiter = trail; } else trail = t; t = next; } } // public methods /** * Moves the longest-waiting thread, if one exists, from the * wait queue for this condition to the wait queue for the * owning lock. * * @throws IllegalMonitorStateException if {@link #isHeldExclusively} * returns {@code false} */ public final void signal() { if (!isHeldExclusively()) throw new IllegalMonitorStateException(); Node first = firstWaiter; if (first != null) doSignal(first); } /** * Moves all threads from the wait queue for this condition to * the wait queue for the owning lock. * * @throws IllegalMonitorStateException if {@link #isHeldExclusively} * returns {@code false} */ public final void signalAll() { if (!isHeldExclusively()) throw new IllegalMonitorStateException(); Node first = firstWaiter; if (first != null) doSignalAll(first); } /** * Implements uninterruptible condition wait. * <ol> * <li> Save lock state returned by {@link #getState}. * <li> Invoke {@link #release} with saved state as argument, * throwing IllegalMonitorStateException if it fails. * <li> Block until signalled. * <li> Reacquire by invoking specialized version of * {@link #acquire} with saved state as argument. * </ol> */ public final void awaitUninterruptibly() { Node node = addConditionWaiter(); int savedState = fullyRelease(node); boolean interrupted = false; while (!isOnSyncQueue(node)) { LockSupport.park(this); if (Thread.interrupted()) interrupted = true; } if (acquireQueued(node, savedState) || interrupted) selfInterrupt(); } /* * For interruptible waits, we need to track whether to throw * InterruptedException, if interrupted while blocked on * condition, versus reinterrupt current thread, if * interrupted while blocked waiting to re-acquire. */ /** Mode meaning to reinterrupt on exit from wait */ private static final int REINTERRUPT = 1; /** Mode meaning to throw InterruptedException on exit from wait */ private static final int THROW_IE = -1; /** * Checks for interrupt, returning THROW_IE if interrupted * before signalled, REINTERRUPT if after signalled, or * 0 if not interrupted. */ private int checkInterruptWhileWaiting(Node node) { return Thread.interrupted() ? (transferAfterCancelledWait(node) ? THROW_IE : REINTERRUPT) : 0; } /** * Throws InterruptedException, reinterrupts current thread, or * does nothing, depending on mode. */ private void reportInterruptAfterWait(int interruptMode) throws InterruptedException { if (interruptMode == THROW_IE) throw new InterruptedException(); else if (interruptMode == REINTERRUPT) selfInterrupt(); } /** * Implements interruptible condition wait. * <ol> * <li> If current thread is interrupted, throw InterruptedException. * <li> Save lock state returned by {@link #getState}. * <li> Invoke {@link #release} with saved state as argument, * throwing IllegalMonitorStateException if it fails. * <li> Block until signalled or interrupted. * <li> Reacquire by invoking specialized version of * {@link #acquire} with saved state as argument. * <li> If interrupted while blocked in step 4, throw InterruptedException. * </ol> */ public final void await() throws InterruptedException { if (Thread.interrupted()) throw new InterruptedException(); Node node = addConditionWaiter(); int savedState = fullyRelease(node); int interruptMode = 0; while (!isOnSyncQueue(node)) { LockSupport.park(this); if ((interruptMode = checkInterruptWhileWaiting(node)) != 0) break; } if (acquireQueued(node, savedState) && interruptMode != THROW_IE) interruptMode = REINTERRUPT; if (node.nextWaiter != null) // clean up if cancelled unlinkCancelledWaiters(); if (interruptMode != 0) reportInterruptAfterWait(interruptMode); } /** * Implements timed condition wait. * <ol> * <li> If current thread is interrupted, throw InterruptedException. * <li> Save lock state returned by {@link #getState}. * <li> Invoke {@link #release} with saved state as argument, * throwing IllegalMonitorStateException if it fails. * <li> Block until signalled, interrupted, or timed out. * <li> Reacquire by invoking specialized version of * {@link #acquire} with saved state as argument. * <li> If interrupted while blocked in step 4, throw InterruptedException. * </ol> */ public final long awaitNanos(long nanosTimeout) throws InterruptedException { if (Thread.interrupted()) throw new InterruptedException(); Node node = addConditionWaiter(); int savedState = fullyRelease(node); final long deadline = System.nanoTime() + nanosTimeout; int interruptMode = 0; while (!isOnSyncQueue(node)) { if (nanosTimeout <= 0L) { transferAfterCancelledWait(node); break; } if (nanosTimeout >= spinForTimeoutThreshold) LockSupport.parkNanos(this, nanosTimeout); if ((interruptMode = checkInterruptWhileWaiting(node)) != 0) break; nanosTimeout = deadline - System.nanoTime(); } if (acquireQueued(node, savedState) && interruptMode != THROW_IE) interruptMode = REINTERRUPT; if (node.nextWaiter != null) unlinkCancelledWaiters(); if (interruptMode != 0) reportInterruptAfterWait(interruptMode); return deadline - System.nanoTime(); } /** * Implements absolute timed condition wait. * <ol> * <li> If current thread is interrupted, throw InterruptedException. * <li> Save lock state returned by {@link #getState}. * <li> Invoke {@link #release} with saved state as argument, * throwing IllegalMonitorStateException if it fails. * <li> Block until signalled, interrupted, or timed out. * <li> Reacquire by invoking specialized version of * {@link #acquire} with saved state as argument. * <li> If interrupted while blocked in step 4, throw InterruptedException. * <li> If timed out while blocked in step 4, return false, else true. * </ol> */ public final boolean awaitUntil(Date deadline) throws InterruptedException { long abstime = deadline.getTime(); if (Thread.interrupted()) throw new InterruptedException(); Node node = addConditionWaiter(); int savedState = fullyRelease(node); boolean timedout = false; int interruptMode = 0; while (!isOnSyncQueue(node)) { if (System.currentTimeMillis() > abstime) { timedout = transferAfterCancelledWait(node); break; } LockSupport.parkUntil(this, abstime); if ((interruptMode = checkInterruptWhileWaiting(node)) != 0) break; } if (acquireQueued(node, savedState) && interruptMode != THROW_IE) interruptMode = REINTERRUPT; if (node.nextWaiter != null) unlinkCancelledWaiters(); if (interruptMode != 0) reportInterruptAfterWait(interruptMode); return !timedout; } /** * Implements timed condition wait. * <ol> * <li> If current thread is interrupted, throw InterruptedException. * <li> Save lock state returned by {@link #getState}. * <li> Invoke {@link #release} with saved state as argument, * throwing IllegalMonitorStateException if it fails. * <li> Block until signalled, interrupted, or timed out. * <li> Reacquire by invoking specialized version of * {@link #acquire} with saved state as argument. * <li> If interrupted while blocked in step 4, throw InterruptedException. * <li> If timed out while blocked in step 4, return false, else true. * </ol> */ public final boolean await(long time, TimeUnit unit) throws InterruptedException { long nanosTimeout = unit.toNanos(time); if (Thread.interrupted()) throw new InterruptedException(); Node node = addConditionWaiter(); int savedState = fullyRelease(node); final long deadline = System.nanoTime() + nanosTimeout; boolean timedout = false; int interruptMode = 0; while (!isOnSyncQueue(node)) { if (nanosTimeout <= 0L) { timedout = transferAfterCancelledWait(node); break; } if (nanosTimeout >= spinForTimeoutThreshold) LockSupport.parkNanos(this, nanosTimeout); if ((interruptMode = checkInterruptWhileWaiting(node)) != 0) break; nanosTimeout = deadline - System.nanoTime(); } if (acquireQueued(node, savedState) && interruptMode != THROW_IE) interruptMode = REINTERRUPT; if (node.nextWaiter != null) unlinkCancelledWaiters(); if (interruptMode != 0) reportInterruptAfterWait(interruptMode); return !timedout; } // support for instrumentation /** * Returns true if this condition was created by the given * synchronization object. * * @return {@code true} if owned */ final boolean isOwnedBy(AbstractQueuedSynchronizer sync) { return sync == AbstractQueuedSynchronizer.this; } /** * Queries whether any threads are waiting on this condition. * Implements {@link AbstractQueuedSynchronizer#hasWaiters(ConditionObject)}. * * @return {@code true} if there are any waiting threads * @throws IllegalMonitorStateException if {@link #isHeldExclusively} * returns {@code false} */ protected final boolean hasWaiters() { if (!isHeldExclusively()) throw new IllegalMonitorStateException(); for (Node w = firstWaiter; w != null; w = w.nextWaiter) { if (w.waitStatus == Node.CONDITION) return true; } return false; } /** * Returns an estimate of the number of threads waiting on * this condition. * Implements {@link AbstractQueuedSynchronizer#getWaitQueueLength(ConditionObject)}. * * @return the estimated number of waiting threads * @throws IllegalMonitorStateException if {@link #isHeldExclusively} * returns {@code false} */ protected final int getWaitQueueLength() { if (!isHeldExclusively()) throw new IllegalMonitorStateException(); int n = 0; for (Node w = firstWaiter; w != null; w = w.nextWaiter) { if (w.waitStatus == Node.CONDITION) ++n; } return n; } /** * Returns a collection containing those threads that may be * waiting on this Condition. * Implements {@link AbstractQueuedSynchronizer#getWaitingThreads(ConditionObject)}. * * @return the collection of threads * @throws IllegalMonitorStateException if {@link #isHeldExclusively} * returns {@code false} */ protected final Collection<Thread> getWaitingThreads() { if (!isHeldExclusively()) throw new IllegalMonitorStateException(); ArrayList<Thread> list = new ArrayList<Thread>(); for (Node w = firstWaiter; w != null; w = w.nextWaiter) { if (w.waitStatus == Node.CONDITION) { Thread t = w.thread; if (t != null) list.add(t); } } return list; } } /** * Setup to support compareAndSet. We need to natively implement * this here: For the sake of permitting future enhancements, we * cannot explicitly subclass AtomicInteger, which would be * efficient and useful otherwise. So, as the lesser of evils, we * natively implement using hotspot intrinsics API. And while we * are at it, we do the same for other CASable fields (which could * otherwise be done with atomic field updaters). */ private static final Unsafe unsafe = Unsafe.getUnsafe(); private static final long stateOffset; private static final long headOffset; private static final long tailOffset; private static final long waitStatusOffset; private static final long nextOffset; static { try { stateOffset = unsafe.objectFieldOffset (AbstractQueuedSynchronizer.class.getDeclaredField("state")); headOffset = unsafe.objectFieldOffset (AbstractQueuedSynchronizer.class.getDeclaredField("head")); tailOffset = unsafe.objectFieldOffset (AbstractQueuedSynchronizer.class.getDeclaredField("tail")); waitStatusOffset = unsafe.objectFieldOffset (Node.class.getDeclaredField("waitStatus")); nextOffset = unsafe.objectFieldOffset (Node.class.getDeclaredField("next")); } catch (Exception ex) { throw new Error(ex); } } /** * CAS head field. Used only by enq. */ private final boolean compareAndSetHead(Node update) { return unsafe.compareAndSwapObject(this, headOffset, null, update); } /** * CAS tail field. Used only by enq. */ private final boolean compareAndSetTail(Node expect, Node update) { return unsafe.compareAndSwapObject(this, tailOffset, expect, update); } /** * CAS waitStatus field of a node. */ private static final boolean compareAndSetWaitStatus(Node node, int expect, int update) { return unsafe.compareAndSwapInt(node, waitStatusOffset, expect, update); } /** * CAS next field of a node. */ private static final boolean compareAndSetNext(Node node, Node expect, Node update) { return unsafe.compareAndSwapObject(node, nextOffset, expect, update); } }
示意图

AbstractQueuedSynchronizer在内部依赖一个双向同步队列来完成同步状态的管理,当前线程获取同步状态失败时,同步器会将该线程和等待状态信息构造成一个节点并将其加入到同步队列中。Node节点以AQS的内部类存在。
2.1、Node节点以AQS的内部类存在,其中属性
|
AbstractQueuedSynchronizer$Node |
|
|
属性 |
描述 |
|
volatile int waitStatus |
等待状态,并不是同步状态,而是在队列中的线程节点等待状态(Node节点中一共定义四种状态) CANCELLED = 1 //线程由于超时或被中断会被取消在队列中的等待,被取消了的线程不会再被阻塞,即状态不会再改变 SIGNAL = -1 //后继节点处于等待状态,当前节点释放锁或者取消等待时会通知后继节点 CONDITION = -2 //暂时忽略,涉及Condition PROPAGATE = -3 //下一次共享式同步状态获取将会无条件传播下去 |
|
volatile Node prev |
前驱节点 |
|
volatile Node next |
后继节点 |
|
volatile Thread thread |
保持对当前获取同步状态线程的引用 |
|
Node nextWaiter |
等待队列中的后继节点,同时也表示该节点是共享模式(SHARED)还是独占(EXCLUSIVE)模式。它们共用一个字段。因为在等待队列中的线程一定是独占模式。所以如果nextWatiter == SHARED,那么表示该节点为共享模式。 |
在AQS同步器中由一个头节点和尾节点来维护这个同步队列。
2.2、AbstractQueuedSynchronizer属性
|
AbstractQueuedSynchronizer |
|
|
属性 |
描述 |
|
private transient volatile Node head |
同步队列头节点 |
|
private transient volatile Node tail |
同步队列尾节点 |
注意其中的volatile【主存中存取】、transient【不被串行化】等
同步器中是依靠一个同步队列来完成的同步状态管理,当线程获取锁(或者称为同步状态)失败时,会将线程构造为一个Node节点新增到同步队列的尾部。
在锁的获取当中,并不一定是只有一个线程才能持有这个锁(或者称为同步状态),所以此时有了独占模式和共享模式的区别,也就是在Node节点中由nextWait来标识。比如ReentrantLock就是一个独占锁,只能有一个线程获得锁,而WriteAndReadLock的读锁则能由多个线程同时获取,但它的写锁则只能由一个线程持有。独占模式下锁(或者称为同步状态)的获取与释放,在此之前要稍微提一下“模板方法模式”,在AQS同步器中提供了不少的模板方法,定义一个操作中的算法的骨架,而将一些步骤的实现延迟到子类中。
独占模式锁:ReentrantLock的公平锁和非公平锁
共享模式锁:java.util.concurrent.Semaphore的公平锁和非公平锁、java.util.concurrent.CountDownLatch、java.util.concurrent.locks.ReentrantReadWriteLock等
2.3、独占模式同步状态的获取-以ReentrantLock的非公平锁为例
2.3.1、代码入口获取锁
Lock lock=new ReentrantLock(); lock.lock();
内部调用
public void lock() { sync.lock(); }
查看sync的非公平锁实现
final void lock() { if (compareAndSetState(0, 1)) setExclusiveOwnerThread(Thread.currentThread()); else acquire(1); }
compareAndSetState(0, 1) 这个是尝试获取锁,把state的状态从0改为1表示取得锁.这个时候设置获取锁的线程就是当前线程.
protected final boolean compareAndSetState(int expect, int update) { // See below for intrinsics setup to support this return unsafe.compareAndSwapInt(this, stateOffset, expect, update); }
底层有unsafe方法实现,Unsafe类是什么呢?java不能直接访问操作系统底层,而是通过本地方法来访问。Unsafe类提供了硬件级别的原子操作。
2.3.2、针对acquire
|
AbstractQueuedSynchronizer |
|
|
方法 |
描述 |
|
public final void acquire(int arg) |
独占模式下获取同步状态,忽略中断,即表示无论如何也会在获得同步状态后才返回。 |
此方法实现
public final void acquire(int arg) { if (!tryAcquire(arg) && acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) selfInterrupt(); }
2.3.2.1、父类框架实现
tryAcquire:AQS中有一个默认实现,其默认实现即抛出一个UnsupportedOperationException异常,意为默认下独占模式是不支持此操作的。需要在子类中实现具体逻辑
protected boolean tryAcquire(int arg) { throw new UnsupportedOperationException(); }
2.3.2.1、模板方法子类实现
可以通过查看ReentrantLock中的Sync的子类实现,如非公平锁
static final class NonfairSync extends Sync { //…… final void lock() {//do } protected final boolean tryAcquire(int acquires) { return nonfairTryAcquire(acquires); } }
非公平锁获取的实现
boolean nonfairTryAcquire(int acquires) { final Thread current = Thread.currentThread();//获取当前线程 int c = getState();//获取标志位 if (c == 0) {//没有线程竞争锁 if (compareAndSetState(0, acquires)) {//通过cas设置状态位 setExclusiveOwnerThread(current);//如果cas成功,则代表当前线程获取锁,把当前线程设置到aqs参数中 return true; } } else if (current == getExclusiveOwnerThread()) {//因为ReentrantLock是可重入锁,这里判断获取锁的线程是不是当前线程 int nextc = c + acquires;//每次重入+1, if (nextc < 0) // overflow throw new Error("Maximum lock count exceeded"); setState(nextc);//设置状态 return true; } return false; }
如果如果获取锁,tryAcquire返回true,反之,返回false。回到AQS的acquire方法继续执行addWaiter。
该方法会首先判断当前状态,如果c==0说明没有线程正在竞争该锁,如果不c !=0 说明有线程正拥有了该锁。
如果发现c==0,则通过CAS设置该状态值为acquires,acquires的初始调用值为1,每次线程重入该锁都会+1,每次unlock都会-1,但为0时释放锁。如果CAS设置成功,则可以预计其他任何线程调用CAS都不会再成功,也就认为当前线程得到了该锁,也作为Running线程,很显然这个Running线程并未进入等待队列。
如果c !=0 但发现自己已经拥有锁,只是简单地++acquires,并修改status值,但因为没有竞争,所以通过setStatus修改,而非CAS,也就是说这段代码实现了偏向锁的功能,并且实现的非常漂亮。
2.3.2.3、addWaiter
通过上述在AQS的其中一个实现中,ReentrantLock$Sync对它进行了重写。这个在AQS定义的方法表示该方法保证线程安全的获取同步状态,如果同步状态获取失败(返回false)则构造同步节点并将节点加入到同步队列的尾部,这个操作即是addWaiter方法的实现:
private Node addWaiter(Node mode) { Node node = new Node(Thread.currentThread(), mode); //将线程构造成Node节点。 /*尝试强行直接挂到同步队列的尾部*/ Node pred = tail; if (pred != null) { node.prev = pred; if (compareAndSetTail(pred, node)) { pred.next = node; return node; } } /*如果此时有多个线程都在想把自己挂到同步队列的尾部,上面的操作就会 失败,此时将“无限期”线程安全的等待着挂到同步队列的尾部*/ enq(node); return node; }
在enq的实现中实际就是一个for“死循环”,其目的就是直到成功地添加到同步队列尾部才推出循环。
其中入队实现
private Node enq(final Node node) { //CAS"自旋",直到成功加入队尾 for (;;) { Node t = tail; if (t == null) { // 队列为空,创建一个空的标志结点作为head结点,并将tail也指向它。 if (compareAndSetHead(new Node())) tail = head; } else {//正常流程,放入队尾 node.prev = t; if (compareAndSetTail(t, node)) { t.next = node; return t; } } } }
如果看过AtomicInteger.getAndIncrement()函数源码,那么相信你一眼便看出这段代码的精华。CAS自旋volatile变量,是一种很经典的用法。
2.3.3、acquireQueued自旋
在获取同步状态失败(tryAcqurie) ->构造节点(addWaiter)->添加到同步队列尾部(addWaiter)过后,接下来就是一个很重要的操作acquireQueued自旋。这个动作很重要,其目的就在于每个节点都各自的在做判断是否能获取到同步状态,每个节点都在自省地观察,当条件满足获取到了同步状态则可以从自旋过程中退出,否则继续。
通过tryAcquire()和addWaiter(),该线程获取资源失败,已经被放入等待队列尾部了。进入等待状态休息,直到其他线程彻底释放资源后唤醒自己,自己再拿到资源,然后就可以去干自己想干的事了。在等待队列中排队拿号(中间没其它事干可以休息),直到拿到号后再返回。这个函数非常关键,
final boolean acquireQueued(final Node node, int arg) { boolean failed = true;//标记是否成功拿到资源 try { boolean interrupted = false;//标记等待过程中是否被中断过 //“自旋”! for (;;) { final Node p = node.predecessor();//拿到前驱 //如果前驱是head,即该结点已成老二,那么便有资格去尝试获取资源(可能是老大释放完资源唤醒自己的,当然也可能被interrupt了)。 if (p == head && tryAcquire(arg)) { setHead(node);//拿到资源后,将head指向该结点。所以head所指的标杆结点,就是当前获取到资源的那个结点或null。 p.next = null; // setHead中node.prev已置为null,此处再将head.next置为null,就是为了方便GC回收以前的head结点。也就意味着之前拿完资源的结点出队了! failed = false; return interrupted;//返回等待过程中是否被中断过 } //如果自己可以休息了,就进入waiting状态,直到被unpark() if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) interrupted = true;//如果等待过程中被中断过,哪怕只有那么一次,就将interrupted标记为true } } finally { if (failed) cancelAcquire(node); } }
从上面的代码实现我们可以看到,尽管每个节点都在“无限期”的获取锁,但并不是每个节点能有获取锁的这个资格,而是当它的前驱节点是头节点时才会去获取锁(tryAcquire)。当这个节点获取同步状态时,接下来的方法shouldParkAfterFailedAcquire则会判断当前线程是否需要被阻塞,而这个判断方法则是通过它的前驱节点的waitStatus判断。
2.3.3.1、shouldParkAfterFailedAcquire
此方法主要用于检查状态,看看自己是否真的可以去休息了(进入waiting状态
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) { int ws = pred.waitStatus; //首先获取当前节点的前驱节点等待状态 if (ws == Node.SIGNAL) //当前线程需要被阻塞,即需要被unpark(唤醒) return true; if (ws > 0) { //pred.waitStatus == CANCELLED do { node.prev = pred = pred.prev; //前驱节点等待状态已经处于取消,即不会再获取同步状态时,把前驱节点从同步状态中移除。 } while (pred.waitStatus > 0); pred.next = node; } else { //pred.waitStatus == CONDITION || PROPAGATE compareAndSetWaitStatus(pred, ws, Node.SIGNAL); } return false; }
如果调用该方法判断为当前线程需要被阻塞(返回true),则接着执行parkAndCheckInterrupt阻塞当前线程,直到当前线程被唤醒的时候才从parkAndCheckInterrupt返回。
Node结点是对每一个访问同步代码的线程的封装,其包含了需要同步的线程本身以及线程的状态,如是否被阻塞,是否等待唤醒,是否已经被取消等。变量waitStatus则表示当前被封装成Node结点的等待状态,共有4种取值CANCELLED、SIGNAL、CONDITION、PROPAGATE。
-
CANCELLED:值为1,在同步队列中等待的线程等待超时或被中断,需要从同步队列中取消该Node的结点,其结点的waitStatus为CANCELLED,即结束状态,进入该状态后的结点将不会再变化。
-
SIGNAL:值为-1,被标识为该等待唤醒状态的后继结点,当其前继结点的线程释放了同步锁或被取消,将会通知该后继结点的线程执行。说白了,就是处于唤醒状态,只要前继结点释放锁,就会通知标识为SIGNAL状态的后继结点的线程执行。
-
CONDITION:值为-2,与Condition相关,该标识的结点处于等待队列中,结点的线程等待在Condition上,当其他线程调用了Condition的signal()方法后,CONDITION状态的结点将从等待队列转移到同步队列中,等待获取同步锁。
-
PROPAGATE:值为-3,与共享模式相关,在共享模式中,该状态标识结点的线程处于可运行状态。
-
0状态:值为0,代表初始化状态。
AQS在判断状态时,通过用waitStatus>0表示取消状态,而waitStatus<0表示有效状态。
用当前线程去构造一个Node对象,然后加入到对尾。其中参数mode是独占锁还是共享锁,默认为null,独占锁。这里lock调用的是AQS独占的API。在队列不为空的时候,先尝试通过cas方式修改尾节点为最新的节点,如果修改失败,意味着有并发,这个时候才会进入enq中死循环,“自旋”方式修改。
将线程的节点接入到队里中后,当让还需要做一件事:将当前线程挂起!这个事,由acquireQueued来做。
2.3.3.2、parkAndCheckInterrupt()
此方法就是让线程去休息,真正进入等待状态
private final boolean parkAndCheckInterrupt() { LockSupport.park(this);//调用park()使线程进入waiting状态 return Thread.interrupted();//如果被唤醒,查看自己是不是被中断的。 }
park()会让当前线程进入waiting状态。在此状态下,有两种途径可以唤醒该线程:1)被unpark();2)被interrupt()。需要注意的是,Thread.interrupted()会清除当前线程的中断标记位。
独占模式获取同步状态-小结:
AQS的模板方法acquire通过调用子类自定义实现的tryAcquire获取同步状态失败后->将线程构造成Node节点(addWaiter)->将Node节点添加到同步队列对尾(addWaiter)->每个节点以自旋的方法获取同步状态(acquirQueued)。在节点自旋获取同步状态时,只有其前驱节点是头节点的时候才会尝试获取同步状态,如果该节点的前驱不是头节点或者该节点的前驱节点是头节点单获取同步状态失败,则判断当前线程需要阻塞,如果需要阻塞则需要被唤醒过后才返回。
2.4、独占模式同步状态的释放 -以ReentrantLock的非公平锁为例
public void unlock() { sync.release(1); }
2.4.1、release
|
AbstractQueuedSynchronizer |
|
|
方法 |
描述 |
|
public final boolean release(int arg) |
释放同步状态,并唤醒后继节点 |
当线程获取到了同步状态并且执行了相应的逻辑过后,此时就应该释放同步状态。
release此方法是独占模式下线程释放共享资源的顶层入口。它会释放指定量的资源,如果彻底释放了(即state=0),它会唤醒等待队列里的其他线程来获取资源。
public final boolean release(int arg) { if (tryRelease(arg)) { Node h = head;//找到头结点 if (h != null && h.waitStatus != 0) unparkSuccessor(h);//唤醒等待队列里的下一个线程 return true; } return false; }
调用tryRelease()来释放资源。有一点需要注意的是,它是根据tryRelease()的返回值来判断该线程是否已经完成释放掉资源了!所以自定义同步器在设计tryRelease()的时候要明确这一点
unlock方法调用了AQS的release方法,同样传入了参数1,和获取锁的相应对应,获取一个锁,标示为+1,释放一个锁,标志位-1。tryRelease有子类实现。
跟tryAcquire()一样,这个方法是需要独占模式的自定义同步器去实现的。正常来说,tryRelease()都会成功的,因为这是独占模式,该线程来释放资源,那么它肯定已经拿到独占资源了,直接减掉相应量的资源即可(state-=arg),也不需要考虑线程安全的问题。但要注意它的返回值,上面已经提到了,release()是根据tryRelease()的返回值来判断该线程是否已经完成释放掉资源了!所以自义定同步器在实现时,如果已经彻底释放资源(state=0),要返回true,否则返回false。
2.4.1.1、tryRelease
protected final boolean tryRelease(int releases) { int c = getState() - releases;//释放,-1 if (Thread.currentThread() != getExclusiveOwnerThread())//判断释放的线程跟获取锁的线程是否一致 throw new IllegalMonitorStateException(); boolean free = false; if (c == 0) {//因为重入的关系,则进行多次释放,直至status==0则真正释放锁 free = true; setExclusiveOwnerThread(null); } setState(c); return free; }
释放锁,成功后,找到AQS的头节点(Head),并唤醒它即可unparkSuccessor:
2.4.1.2、unparkSucessor
AQS中的release释放同步状态和acquire获取同步状态一样,都是模板方法,tryRelease释放的具体操作都有子类去实现,父类AQS只提供一个算法骨架。
private void unparkSucessor(Node node) { int ws = node.waitStatus; if (ws < 0) //ws != CANCELLED compareAndSetWaitStatus(node, ws, 0); //利用CAS将当前线程的等待状态置为CANCELLE Node s = node.next; if (s == null || s.waitSatatus > 0) { //如果当前线程的后继节点为空,则从同步队列的尾节点开始向前寻找当前线程的下一个不为空的节点 s = null; for (Node t = tail; t != null && t != node; t = t.prev) if (t.waitStatus <= 0) s = r; } if (s != null) LockSuport.unpark(s.thread); //如果当前线程的后继节点不为空,则调用LockSuport.unpark唤醒其后继节点,使得后继节点得以重新尝试获取同步状态 }
用unpark()唤醒等待队列中最前边的那个未放弃线程
2.5、共享模式同步状态的获取
|
AbstractQueuedSynchronizer |
|
|
方法 |
描述 |
|
public final void acquireShared (int arg) |
共享模式下获取同步状态,忽略中断 |
同独占模式获取同步状态的acquire方法类似
//AbstractQueuedSynchronizer#acquireShared public final void acquireShared(int arg) { if (tryAcquireShared(arg)) //获取锁,由子类具体实现 doAcquireShared(arg); }
针对tryAcquireShared的实现可以发现有:java.util.concurrent.Semaphore的公平锁和非公平锁、java.util.concurrent.CountDownLatch、java.util.concurrent.locks.ReentrantReadWriteLock等
查看doAcquireShared代码
private void doAcquireShared(int arg) { final Node node = addWaiter(Node.SHARED); boolean failed = true; try { boolean interrupted = false; for (;;) { final Node p = node.predecessor(); if (p == head) { int r = tryAcquireShared(arg); if (r >= 0) { setHeadAndPropagate(node, r); p.next = null; // help GC if (interrupted) selfInterrupt(); failed = false; return; } } if (shouldParkAfterFailedAcquire(p, node) && parkAndCheckInterrupt()) interrupted = true; } } finally { if (failed) cancelAcquire(node); } }
共享模式下获取同步状态的自旋过程和独占模式大致相同,从代码实现角度来看不同的是共享模式下把线程构造节点加入队列,以及在获取同步状态后中断当前线程都放到了同一个方法里doAcquireShared。共享模式同样也是只有在是其前驱节点是头结点的时候才会尝试获取同步状态,调用tryAcquireShared获取同步状态成功后会返回大于等于0的数,这个时候将会执行setHeadAndPropagate方法,这个方法首先会将当前获取同步状态的这个线程置为头节点(同独占模式一样),但在将当前线程置为头节点过后,又做了一部分操作,其代码如下:
private void setHeadAndPropagate(Node node, int propagate) { Node h = head; setHead(node); //将当前获取到同步状态的线程节点置为头节点 if (propagate > 0 || h == null || h.waitStatus < 0) { //唤醒后继节点 Node s = node.next; if (s == null || s.isShared()) doReleaseShared(); //唤醒后继节点,因为是共享模式,所以允许多个线程同时获取同步状态 } }
在doReleaseShared方法中,首先便利队列中的所有节点,如果节点状态为SIGNAL,则把SIGNAL状态置为0(初始状态),并调用unparkSuccessor把该节点的后继节点唤醒,如果该节点的状态为0,则把状态置为PROPAGATE。
2.6、共享模式同步状态的释放
|
AbstractQueuedSynchronizer |
|
|
方法 |
描述 |
|
public final boolean releaseShared(int arg) |
释放同步状态,并唤醒后继节点 |
该方法的实现同独占模式类似,也是一个模板方法,具体的释放实现由子类自定义,在成功释放同步状态后将会唤醒后继节点:
public final boolean releaseShared(int arg) { if (tryReleaseShared(arg)) { //释放同步状态 doReleaseShared(); //唤醒后继节点 return true; } return false; }
三、总结
3.1、Main exported method【主要方法】
|
AbstractQueuedSynchronizer |
|
|
public final void acquire(int arg) |
独占模式下阻塞获取同步状态,成功获取则返回,失败则进入同步队列等待。(例:ReentrantLock.lock) |
|
public final void acquireInterruptibly(int arg) |
该方法与acquire类似,唯一不同的是如果当前线程被中断,该方法会抛出InterruptedException并返回,也就是说如果当前线程不被中断则和acquire一样。(例:ReentrantLock.lockInterruptibly) |
|
public final boolean tryAcquireNanos(int arg, long nanosTimeOut) |
该方法在acquireInterruptibly的基础上增加了超时限制,如果当前线程在超时时间内获取到同步状态则返回true,获取不到则返回false。(例:ReentrantLock.tryLock) |
|
public final acquireShared(int arg) |
共享模式下阻塞获取同步状态,成功获取则返回,失败则进入同步队列。(例:ReentrantReadWriteLock.unlock) |
|
public final acquireSharedInterruptibly(int arg) |
与acquireShared不同是此方法响应中断,与acquireInterruptibly类似,不同是的此方法是在共享模式下。(例:ReentrantReadWriteLock.lockInterruptibly) |
|
public final tryAcquireSharedNanos(int arg, long nanos) |
在acquireSharedInterruptibly基础上增加了超时限制,同样是在共享模式下。(例:ReentrantReadWriteLock.tryAcquireSharedNanos) |
|
public final boolean release(int arg) |
独占模式下释放同步状态,释放之后会将同步队列中的第一个包含的线程唤醒 |
|
public final boolean releaseShared(int arg) |
共享模式下释放同步状态 |
子类可以重写的模板方法
|
AbstractQueuedSynchronizer |
|
|
protected boolean tryAcquire(int arg) |
子类可实现在独占模式下获取同步状态的具体方法。 |
|
protected boolean tryRelease() |
子类可实现在独占模式下释放同步状态的具体方法。 |
|
protected int tryAcquireShared(int arg) |
子类可实现在共享模式下获取同步状态的具体方法。 |
|
protected int tryReleaseShared() |
子类可实现在共享模式下释放同步状态的具体方法。 |
|
protected boolean isHeldExclusively() |
当前同步器是否在独占模式下被线程占用,一般表示该方法是否被当前线程所独占。 |
3.2、Queue inspection methods【队列检查方法】
|
AbstractQueuedSynchronizer |
|
|
public final boolean hasQueuedThreads() |
同步队列中是否有等待线程。 |
|
public final boolean hasContended() |
查询是否其他线程也曾争则获取此同步器,也就是说acquire是否已经阻塞,是则返回true。 |
|
public final Thread getFirstQueuedThread() |
返回当前同步队列中的第一个线程,米有则返回null。 |
|
public final boolean isQueued(Thread thread) |
线程是否已经在等待队列中,是则返回true。 |
|
final boolean apparentlyFirstQueuedIsExclusive() |
(包级可见)同步队列中第一个等待节点是否为独占模式 |
|
public final boolean hasQueuedPredecessors() |
查询是否有其他线程获取同步状态的时间大于当前线程,用于公平锁的实现。 |
3.3、Instrumentation and monitoring methods【监控监测方法】
|
AbstractQueuedSynchronizer |
|
|
public final int getQueueLength() |
返回同步队列的估计长度,该方法用于监视系统状态,而非同步控制。 |
|
public final Collection<Thread> getQueuedThreads() |
获取同步队列线程集合,同样是一个估计值。 |
|
public final Collection<Thread> getExclusiveQueuedThreads() |
获取同步队列中独占模式线程集合,估计值。 |
|
public final Collection<Thread> getSharedQueuedThreads() |
获取同步队列中共享模式线程集合,同估计值。 |
3.4、Internal support methods for Conditions【内部支持的Conditions方法】
|
AbstractQueuedSynchronizer |
|
|
final isOnSyncQueue(Node node) |
当前节点是否在sync等待队列中 |
其实还有:Instrumentation methods for conditions等一些方法。
参看:https://www.cnblogs.com/yulinfeng/p/6883484.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号