
05 2023 档案
在一个进程中通过队列的方式缓存opencv视频帧,并在另一个进程中读取
摘要:import _thread import queue import time import cv2 from flask import Flask, Response app = Flask(__name__) max_size = 3 q1 = queue.Queue(maxsize=max_s
在python中将opencv读取到的视频数据发布为ros话题,并在ros中能够通过rqt显示出来
摘要:import cv2 import rospy from sensor_msgs.msg import Image from cv_bridge import CvBridge, CvBridgeError # Initialize ROS node rospy.init_node('video_p
python asyncio
摘要:例子 import asyncio async def main(): print("hello") await asyncio.sleep(1) print("world") asyncio.run(main()) 主要函数 task = asyncio.create_tas() res = aw
yazi框架学习笔记
摘要:主线程 监听和建立客户端的连接 接收客户端的请求数据,创建一个任务,该任务携带请求数据,并把该任务放入任务队列 告诉分发线程,有请求任务过来了,叫他赶紧去处理 重复上面三个步骤 注意:主线程不处理具体请求 分发线程 查看任务队列,看是否有请求任务?没有任务则继续睡觉,否则把任务取出来,然后分发给线程
(select poll epoll)-图解
摘要: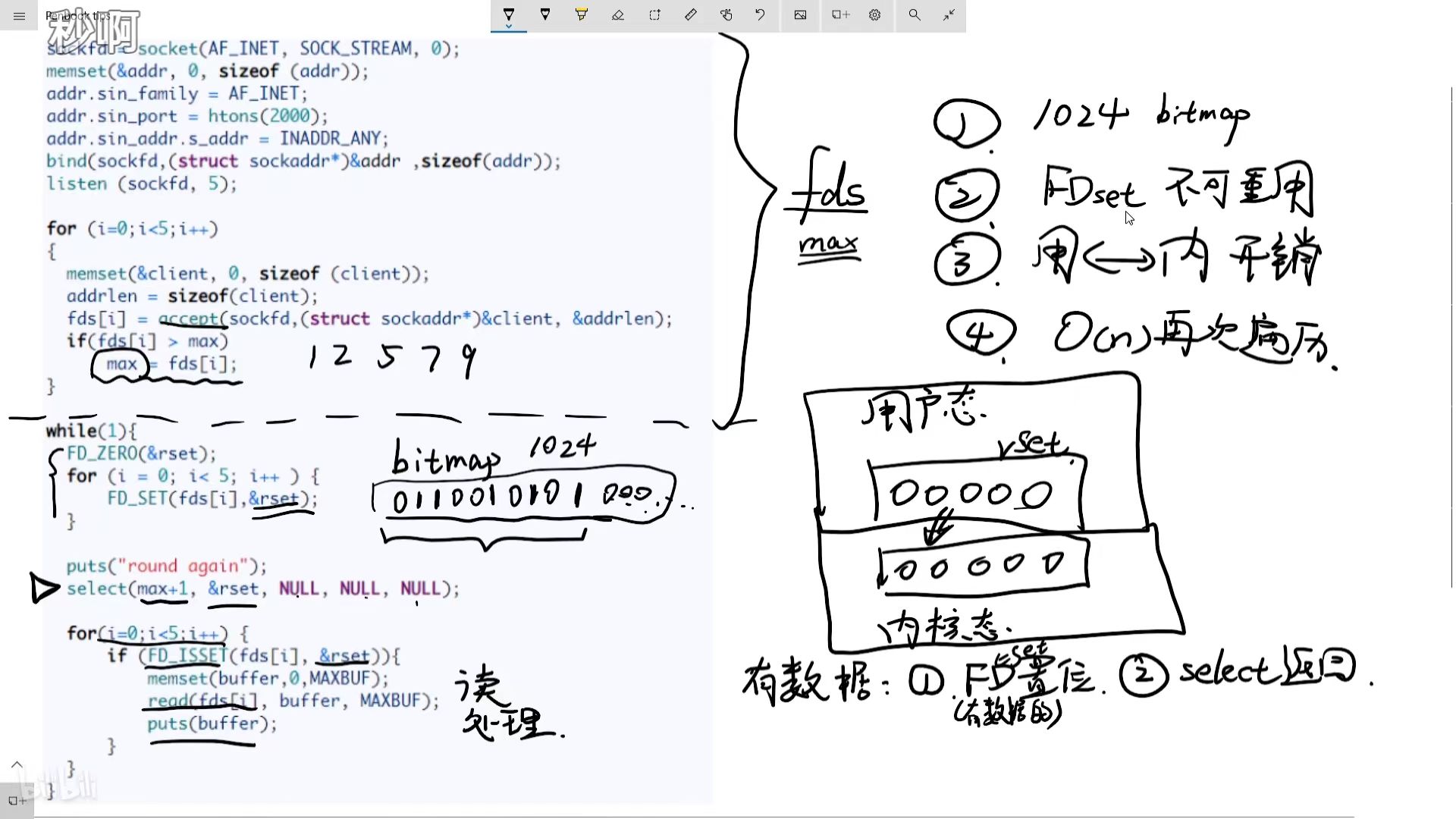
deepsort主要代码
摘要:app.py import json import os import time import numpy as np import requests import objtracker from exts import passers_by_requests_post, video_post, d

