
[AI] 读书笔记 - 《深度学习》第二章 线性代数
第二章 线性代数
2.1 名词
标量(scalar)、向量(vector)、矩阵(matrix)、张量(tensor)
2.2 矩阵和向量相乘
1. 正常矩阵乘法; 2. 向量点积; 3. Hadamard乘积(元素对应乘积)
矩阵乘法服从分配律、结合律,两个向量的点积满足交换律,利用两个向量点积的结果是标量(scalar),标量转置是自身。
2.3 单位矩阵和逆矩阵
逆矩阵一般作为理论工具使用,计算机由于精度不足,一般不使用逆矩阵。
2.4 线性相关和生成子空间
线性方程组,解的个数:0、1、∞,不存在有限多个解的情况。
线性方程组,只有方阵,且是非奇异的(所有列向量线性无关)才能用逆矩阵求解。
2.5 范数(norm)
将向量映射到非负值的函数(衡量向量到原点的距离),满足距离三要素。
范数分为x范数和Lx范数,例如L2被称为欧几里得范数。
L0范数(在数学意义上是不对的):非零元素数目个数。
L1范数:常用于数据集中于原点附近;零和非零元素差异非常重要;非零元素数目的替代函数(因为L0范数对向量缩放无感知)
L2范数:欧几里得范数,其平方值常用于衡量向量的大小,可以简单的通过点积运算。(在原点附近增长的十分缓慢,此时推荐用L1范数)
L∞范数:最大范数,最大的元素的绝对值,即||x||∞=maxi(|xi|)
Frobenius范数:常用于衡量矩阵的大小,在深度学习中的最常见做法,计算矩阵每个元素的平方和后 开方,类似于向量的L2范数。
2.6 特殊类型的矩阵和向量
单位向量(unit vector)是具有单位范数(unit norm)的向量:||x||2=1(欧几里得距离为1)。
如果两个向量不仅相互正交(点积为0)且范数为1,称为标准正交(orthonormal)。
正交矩阵(orthogonal matrix):行向量和列向量分别是标准正交的方阵。
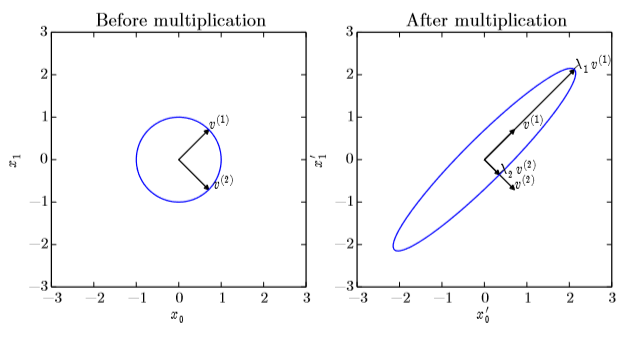
2.7 特征分解
将矩阵分解为特征值 λ 和特征向量的表示形式。(一般只有方阵才有)
可以看作在二维平面上画出特征向量后,乘上矩阵A表示这个向量被拉伸了 λ 倍,如下图:
λ > 0:正定矩阵(positive definite)
λ ≥ 0:半正定矩阵(positive semidefinite)
λ < 0:负定矩阵(negative definite)
2.8 奇异值分解 SVD
这里书里讲的不是很清楚,推荐一个视频:https://www.bilibili.com/video/av15971352
博主先在这里说说自己对SVD的理解:就是
提取矩阵的特征,按特征的重要程度从大到小排序,每个特征的权重就是奇异值,特征本身就是奇异向量,当保留权重较大的几个特征时,能够很好地还原出原矩阵。
因为非方阵的矩阵无法计算逆矩阵,所以无法进行特征分解,故提出了奇异值分解(singular value decomposition)。
每个实数矩阵都有一个奇异值分解,但不一定都有特征值分解。(例如,非方阵的矩阵没有特征分解,这时只能用奇异值分解)。
且奇异值分解有着更广泛的应用(例如特征降维,矩阵去噪)。
博主对原理的理解:SVD就是分别计算ATA和AAT,让其变成方阵,然后对角化,从对角化后的信息中提取特征,经过转换后作为奇异值,从而复原矩阵A。
2.9 Moore-Penrose伪逆(广义逆矩阵)
A+=VD+UT
U,D和V是矩阵A奇异值分解(SVD)后得到的矩阵,对角矩阵D的伪逆D+是其非零元素取倒数之后再转置得到的。
当矩阵A的列数多于行数(矮胖)时,用伪逆求解线性方程是众多可能解法中的一种。但是x=A+y是方程所有可行解中欧几里得范数L2最小的一个。
当行数多于列数时,可能没有解(因为没有满秩),在这种情况下,通过伪逆得到的x使得Ax和y的欧几里得距离||Ax-y||2最小。
(这部分没怎么查资料,暂时不知道其在机器学习中的应用)
2.10 迹运算
没什么好说的,对角线元素的和,以下是迹运算的性质:
一个矩阵的转置不影响迹的大小;
多个矩阵相乘,将最后一个挪到最前面之后,迹是相同的( Tr(ABC)=Tr(CAB)=Tr(BCA) )。
标量在迹运算后仍然是它自己。a=Tr(a);
循环置换后矩阵形状变了,也不影响迹的大小。
2.11 行列式
det(A)等于矩阵特征值的乘积,用来衡量矩阵参与矩阵乘法后空间扩大或者缩小了多少。
2.12 实例:主成分分析 PCA
关键词:单位范数、L2范数、最优化问题、向量微积分、Frobenius范数……
这块有点困难,之后补上。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号