Ubuntu20.04中 ORBSLAM3的安装和测试
ORBSLAM3 安装以及测试教程(Ubuntu20.04)
1.前期准备工作
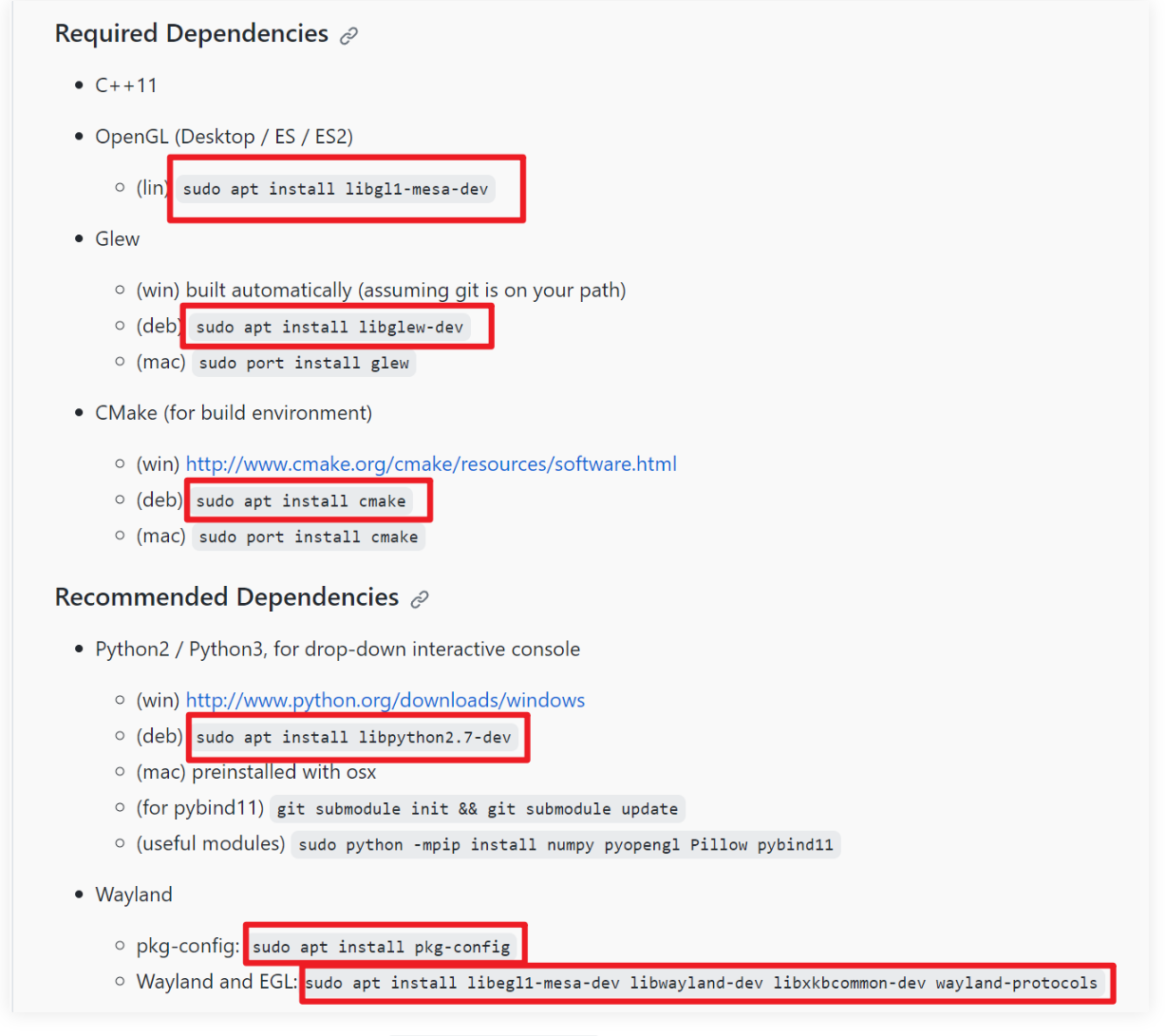
1.1安装相关依赖
sudo apt install git cmake gcc g++ mlocate
1.2下载ORBSLAM3源码
可以直接通过github下载源码: (https://github.com/UZ-SLAMLab/ORB_SLAM3)
2.安装一些所需的库
2.1 安装Eigen3库
直接通过命令安装 sudo apt-get install libeigen3-dev。
但是通常安装不全会遇到一定麻烦。因此通常是采用源码编译的方法: Eigen3库github地址: https://github.com/eigenteam/eigen-git-mirror/tree/3.3.4 一定要下载对应的3.3.4版本。 直接解压然后编译安装:
cd eigen-git-mirror-3.3.4
mkdir build & cd build
cmake ..
sudo make install
2.2 安装Pangolin0.6
github下载源码:https://github.com/stevenlovegrove/Pangolin/tree/v0.6 一定要安装0.6的版本
根据github对应的依赖依次安装。
然后解压进入文件中编译:
cd Pangolin0.6/
mkdir build &cd build
cmake ..
make -j4
sudo make install
可以通过下述方法测试是否安装成功:
cd Pangolin0.6/examples/HelloPangolin
mkdir build & cd build
cmake ..
make
./HelloPangolin
运行后如果出现一个红绿蓝立方体,则代表安装成功。
2.3安装OpenCV
ORBSLAM3要求OpenCV版本为4.x以上,本文采用的是OpenCV4.4.0,从Opencv官网下载4.4.0版本:https://opencv.org/releases/。
下载完后解压到主文件夹内(Home)新建的opencv中
然后在github中下载contrib版本(下载4.4.0版本):https://github.com/opencv/opencv_contrib/tree/4.4.0
同样解压到opencv文件夹中。
通常opencv_contirb中会缺少一些需要的文件,因此可以通过链接下载:https://wwtt.lanzouw.com/if60o1cwvv4h 密码:d5fx
下载后将文件放入opencv_contrib-4.4.0/modules/xfeatures2d/src 文件夹内。
然后需要对两个地方进行修改
- opencv_contrib-4.4.0/modules/xfeatures2d/test/test_features2d.cpp 文件 将里面的第 51~52 行代码路径改为:
#include "../../../../opencv-4.4.0/modules/features2d/test/test_detectors_regression.impl.hpp"
#include "../../../../opencv-4.4.0/modules/features2d/test/test_descriptors_regression.impl.hpp"
- 修改 opencv_contrib-4.4.0/modules/xfeatures2d/test/test_rotation_and_scale_invariance.cpp 文件,将里面的第 7~8 行代码路径改为:
#include "../../../../opencv-4.4.0/modules/features2d/test/test_detectors_invariance.impl.hpp" // main OpenCV repo
#include "../../../../opencv-4.4.0/modules/features2d/test/test_descriptors_invariance.impl.hpp" // main OpenCV repo
打开终端编译:
cd opencv
mkdir -p build && cd build
cmake -DOPENCV_EXTRA_MODULES_PATH=../opencv_contrib-4.4.0/modules ../opencv-4.4.0
make -j4
sudo make install
3.安装ORBSLAM3
解压ORBSLAM3文件,进入其中,打开对应的可视化选项
打开 Examples/Monocular 文件夹下的 mono_euroc.cc 文件,找到第 83 行:
将ORB_SLAM3::System SLAM(argv[1],argv[2],ORB_SLAM3::System::MONOCULAR, false);改为true。
按照官网给的指令编译安装:
cd ORB_SLAM3
chmod +x build.sh
./build.sh #如果遇到问题就按照命令行一行一行输入,查看问题出在哪
4.数据集测试
4.1数据集下载
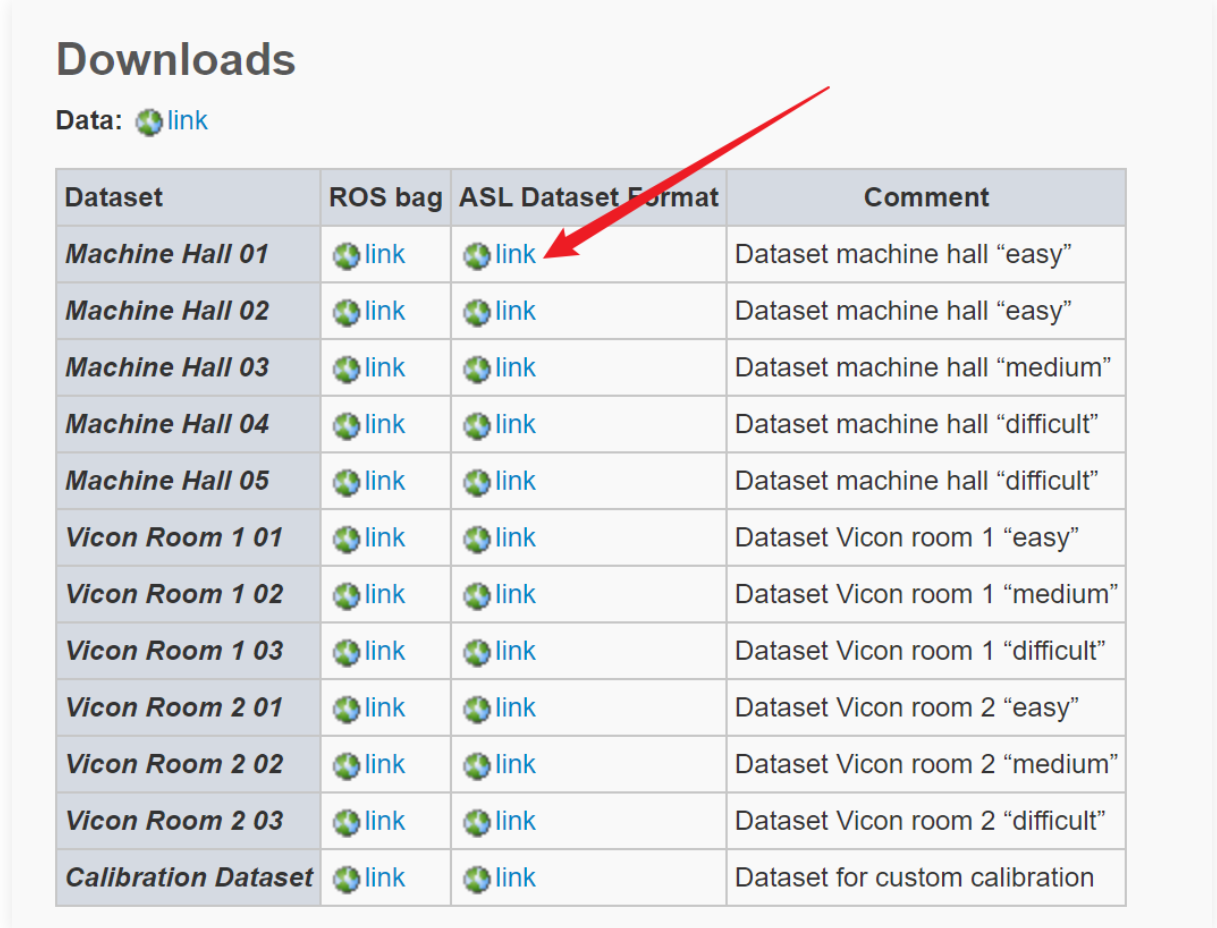
下载地址:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets#downloads
将第一个Machine Hall01数据集下载对应的ASL Data。
下载完成后进入文件夹(随便哪个文件夹),创建dataset文件夹,再在下面创建MH01文件夹,将解压得到的mav0文件移动到MH01中。然后在终端中测试:
将最后的路径换成你下载的MH01对应路径
cd ORB_SLAM3
cd Examples
./Monocular/mono_euroc ../Vocabulary/ORBvoc.txt ./Monocular/EuRoC.yaml /home/xiao/dataset/MH01 ./Monocular/EuRoC_TimeStamps/MH01.txt
出现以下结果就是成功

5.遇到的一些问题
5.1 opencv编译失败
opencv编译失败可能是一些动态库指向错误,主要是与anaconda环境相冲突,链接给出了很好的解答。
5.2编译成功后运行出现GTK+2.X错误

按照提示安装 libgtk2.0-dev等
或者在conda环境下pip install opencv-contrib-python,重新编译opencv即可(两种之一解决方法?)
参考链接:
[1]:https://www.cnblogs.com/xiaoaug/p/17766112.html
[2]:https://blog.csdn.net/qq_19278525/article/details/134039141
[3]:https://blog.csdn.net/kuvinxu/article/details/126233165
[4]:https://www.zhihu.com/question/263917089

 浙公网安备 33010602011771号
浙公网安备 33010602011771号