基于梯度的优化方法
1.目标函数(objective function)或准则(criterion)
要最小化或最大化的函数
最小化时,我们也把它称为代价函数(cost function)、损失函数(loss function)或误差函数(error function)
一个上标 ∗ 表示最小化或最大化函数的 x 值。如我们记 x ∗ =argminf(x)
2.梯度下降(gradient descent)
将 x 往导数的反方向移动一小步来减小 f(x)
f(x − ϵsign(f ′ (x)))
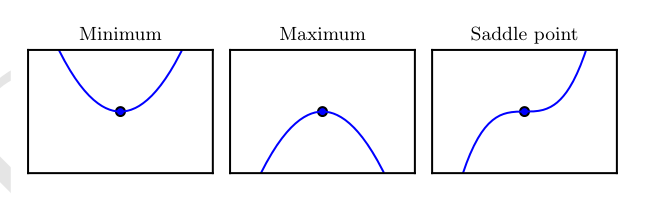
f ′ (x) = 0 的点称为临界点(critical point)或驻点(stationary point)
一个局部极小点(local minimum)意味着这个点的 f(x) 小于所有邻近点,因此不可能通过移动无穷小的步长来减小f(x)
一个局部极大点(local maximum)意味着这个点的 f(x) 大于所有邻近点,因此不可能通过移动无穷小的步长来增大 f(x)
临界点既不是最小点也不是最大点。这些点被称为鞍点(saddle point)
使 f(x) 取得绝对的最小值(相对所有其他值)的点是全局最小点(global minimum)
最小化具有多维输入的函数:f : R n → R。针对具有多维输入的函数,我们需要用到偏导数(partial derivative)的概念
偏导数衡量点 x 处只有 x i增加时 f(x) 如何变化
梯度(gradient)是相对一个向量求导的导数:f 的导数是包含所有偏导数的向量,记为 ∇ x f(x)
梯度的第i个元素是 f 关于 x i 的偏导数。在多维情况下,临界点是梯度中所有元素都为零的点
在 u(单位向量)方向的方向导数(directional derivative)是函数 f 在 u 方向的斜率
方向导数是函数 f(x + αu) 关于 α 的导数(在 α = 0 时取得)。使用链式法则,我们可以看到当 α = 0 时,∂/∂α f(x + αu) = u⊤ ∇ x f(x)
计算方向导数
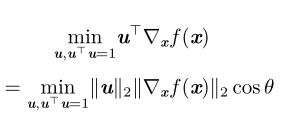
其中 θ 是 u 与梯度的夹角,将 ∥u∥ 2 = 1 代入,并忽略与 u 无关的项,就能简化得到 minucosθ。
这在 u 与梯度方向相反时取得最小。换句话说,梯度向量指向上坡,负梯度向量指向下坡。
我们在负梯度方向上移动可以减小 f。这被称为最速下降法(method of steepest descent) 或梯度下降(gradient descent)
最速下降建议新的点为
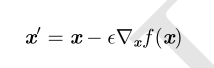
其中 ϵ 为学习率(learning rate),是一个确定步长大小的正标。
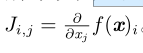
3.Jacobian(Jacobian)矩阵
如果我们有一个函数:f : R m → R n ,f 的 Jacobian 矩阵 J ∈ R n×m 定义
4.Hessian(Hessian)矩阵
5.最优步长
当 f ′ (x) = 0 且 f ′′ (x) > 0 时,x 是一个局部极小点。同样,当 f ′ (x) = 0 且 f ′′ (x) < 0 时,x 是一个局部极大点
当 f ′′ (x) = 0 时测试是不确定的。在这种情况下,x 可以是一个鞍点或平坦区域的一部分

 浙公网安备 33010602011771号
浙公网安备 33010602011771号