elasticsearch 分片的创建 集群重启分片运作
Here are some great slides from our Core Elasticsearch: Operations course that help explain the concept. We'd recommend that you take the full course to understand this even better, but I'll provide an overview from our training here:
Shard allocation is the process of allocating shards to nodes. This can happen during initial recovery, replica allocation, rebalancing, or when nodes are added or removed. Most of the time, you don't need to think about it, this work is done by Elasticsearch in the background. If you've ever found yourself curious about these particulars, this blog will explore shard allocation in several different scenarios.
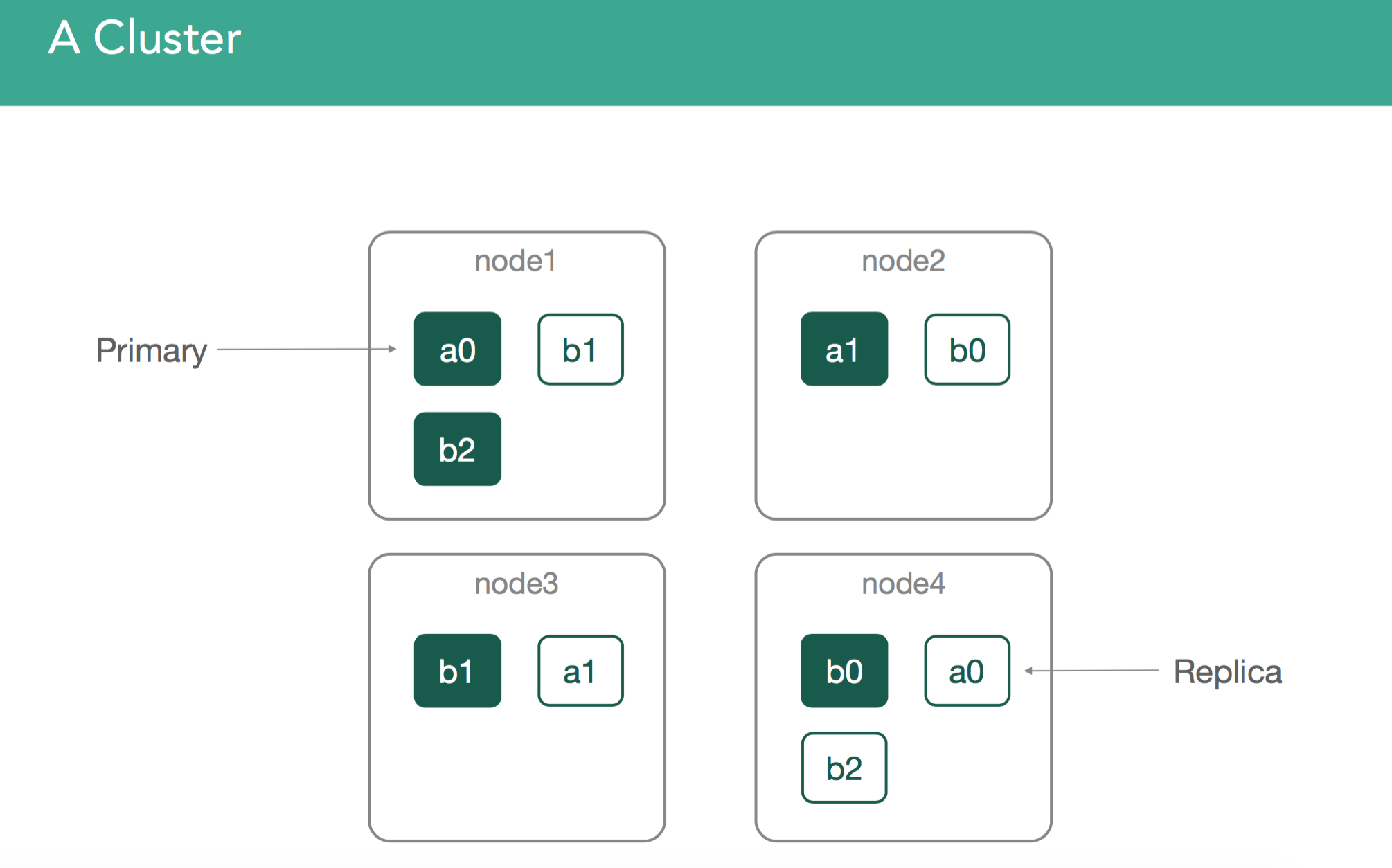
This is our 4 node cluster, it's what we'll use for the examples within our content:
We'll cover several different scenarios.
Scenario 1. Index creation
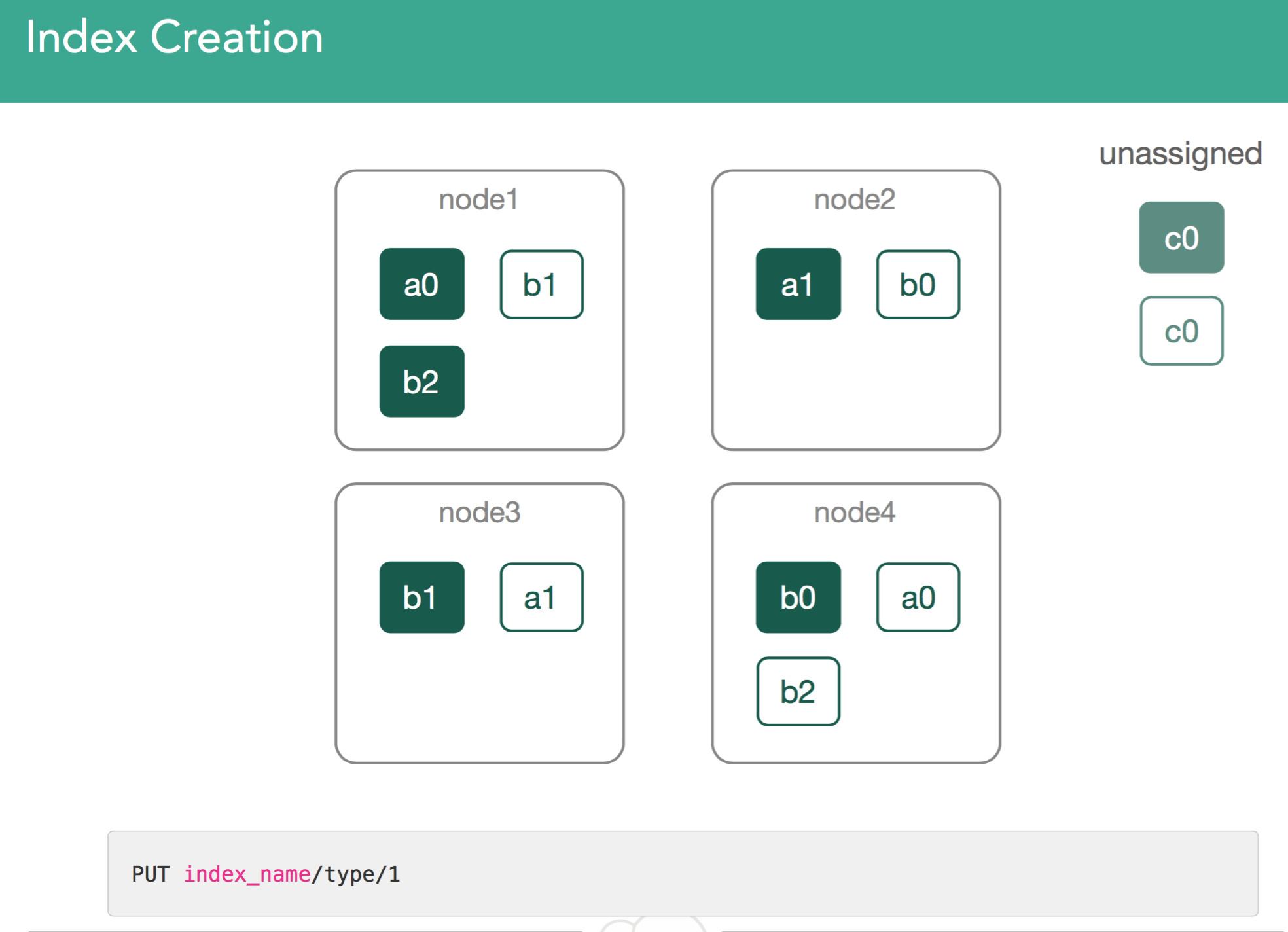
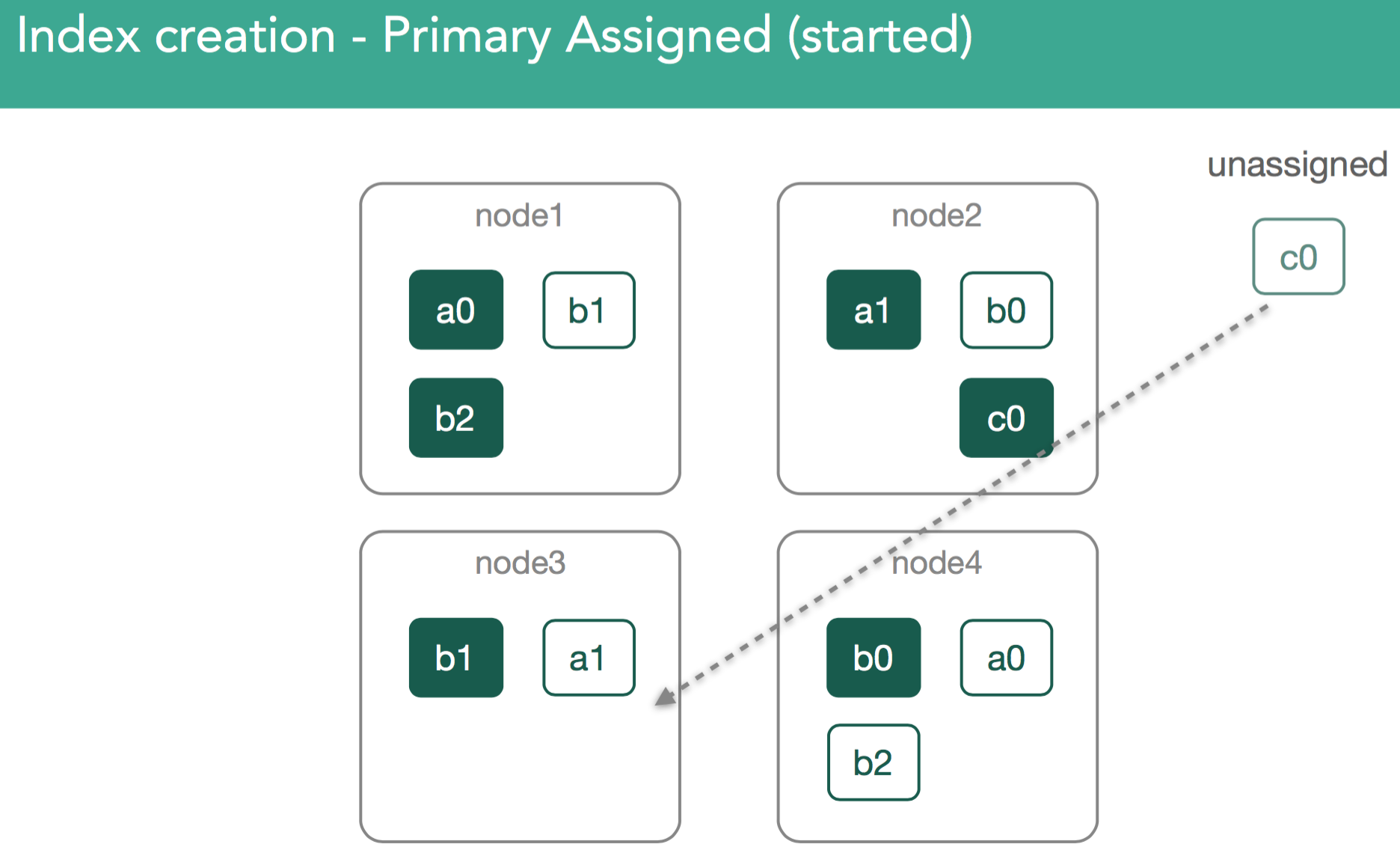
This is the most simple use case. We've created an index, c, and for it we've got to assign new shards. This will be done by indexing the first document into a new index c, with a command like you see in the grey box, using the Console(formerly Sense) plugin from within Kibana.
For index c, we're creating one primary shard, and one replica. The master needs to create index c, and assign 2 shards for c0, a primary and a replica. The way that the cluster will balance the cluster is by:
- By looking at the average number of shards that each node in the cluster contains and then trying to get that number to be as close to the same as possible
- By evaluating on a per index level in the cluster, and trying to rebalance shards across those indices.
There are certain restrictions on this process, and those restrictions are imposed by allocation deciders. They evaluate every decision the cluster tries to make and make a yes/no decision. They run on the master. You can think of it like the master proposing changes, and the deciders tell the master if there are any blocks that prevent the master's proposition.
The cleanest example of this is that you cannot put a primary and a replica on the same node.
There are other examples as well:
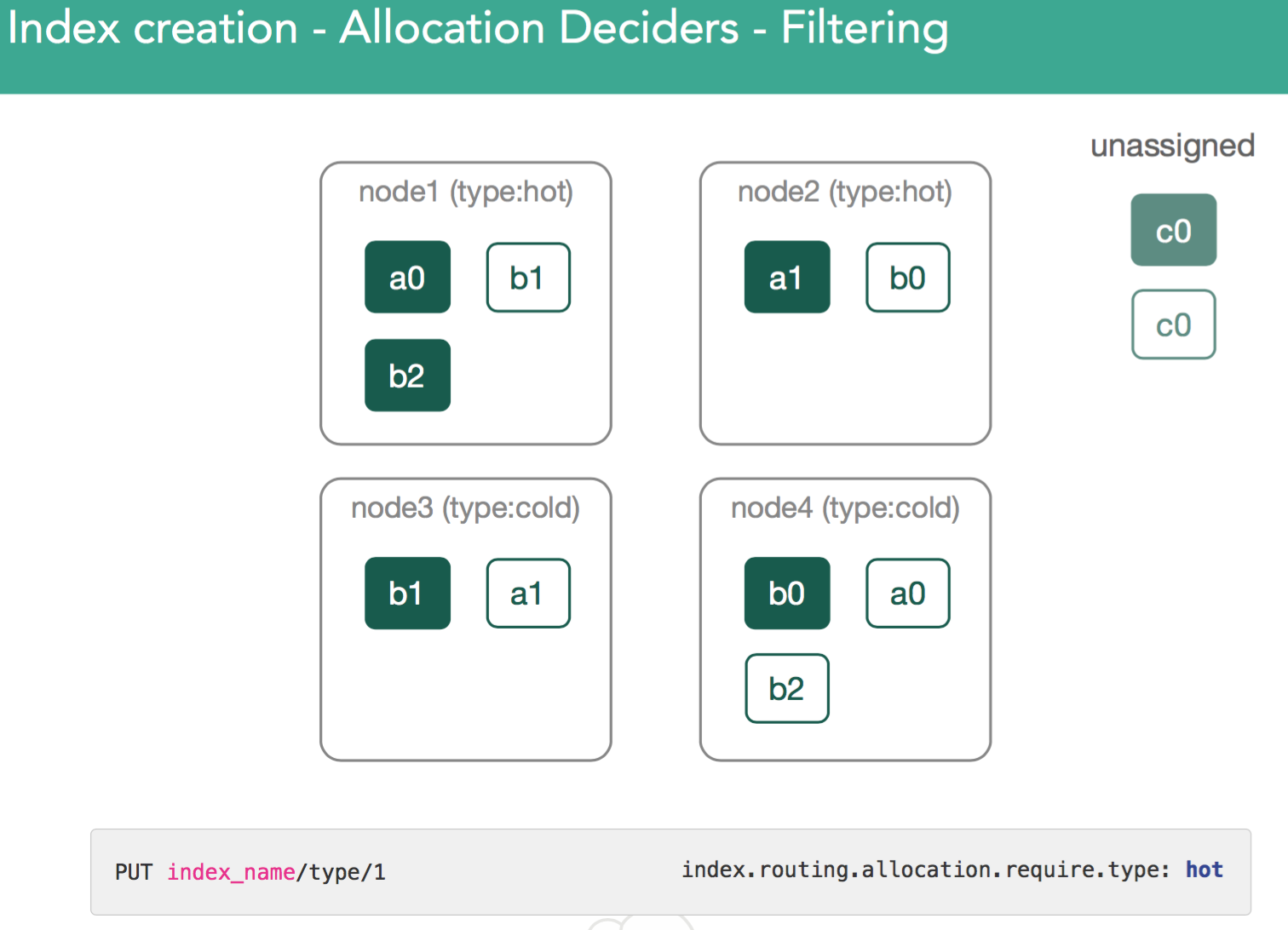
1. Allocation Filtering on Hot/Warm setups. This allows you to only put shards on nodes with certain attributes and will either accept or reject decisions made by the cluster made via this logic. This is an example of a User-driven decision controlling this configuration.
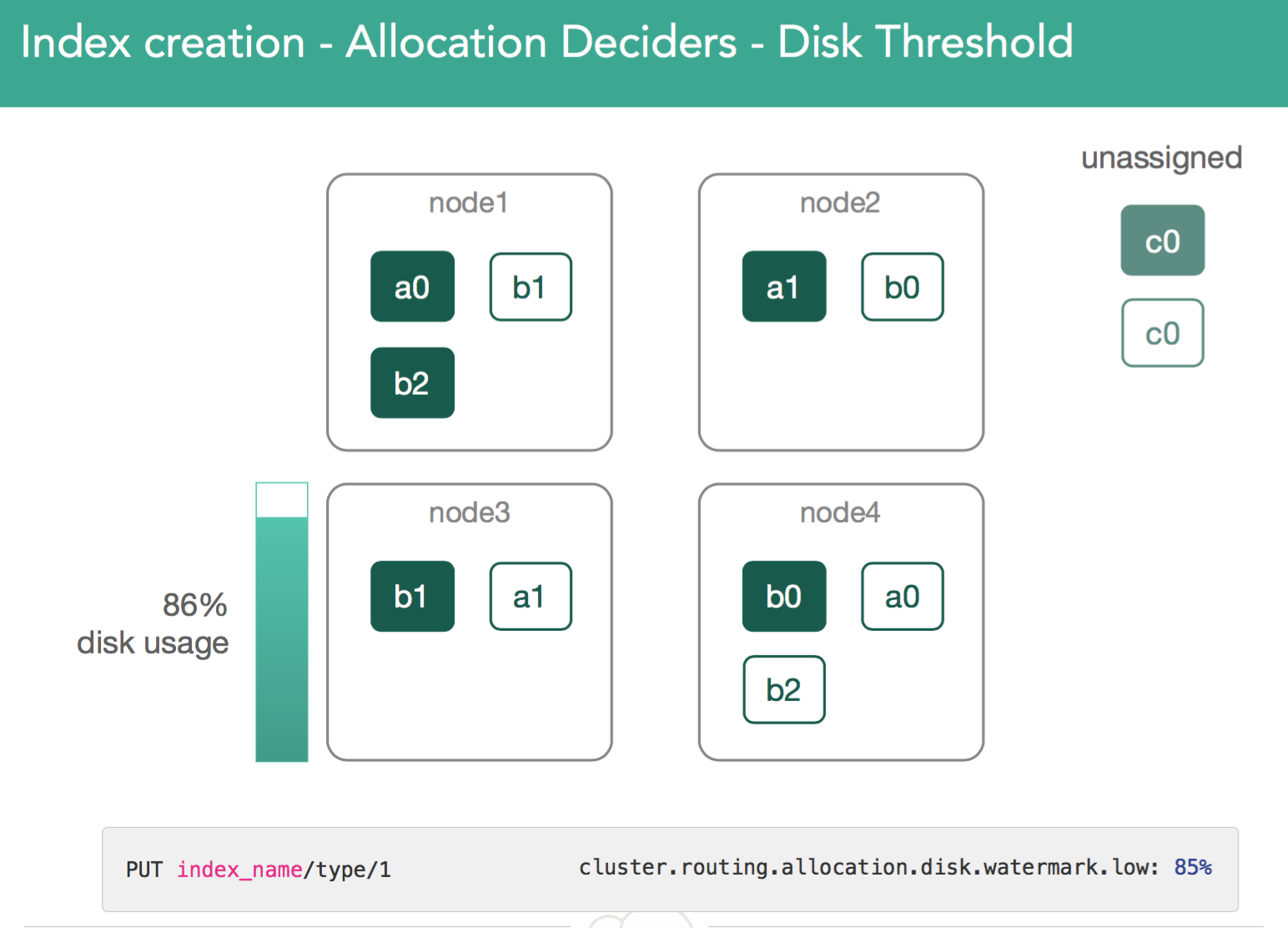
2. Disk usage allocator. The Master monitors disk usage on cluster and looks at high/low watermark. (see "Time to move a shard" below).
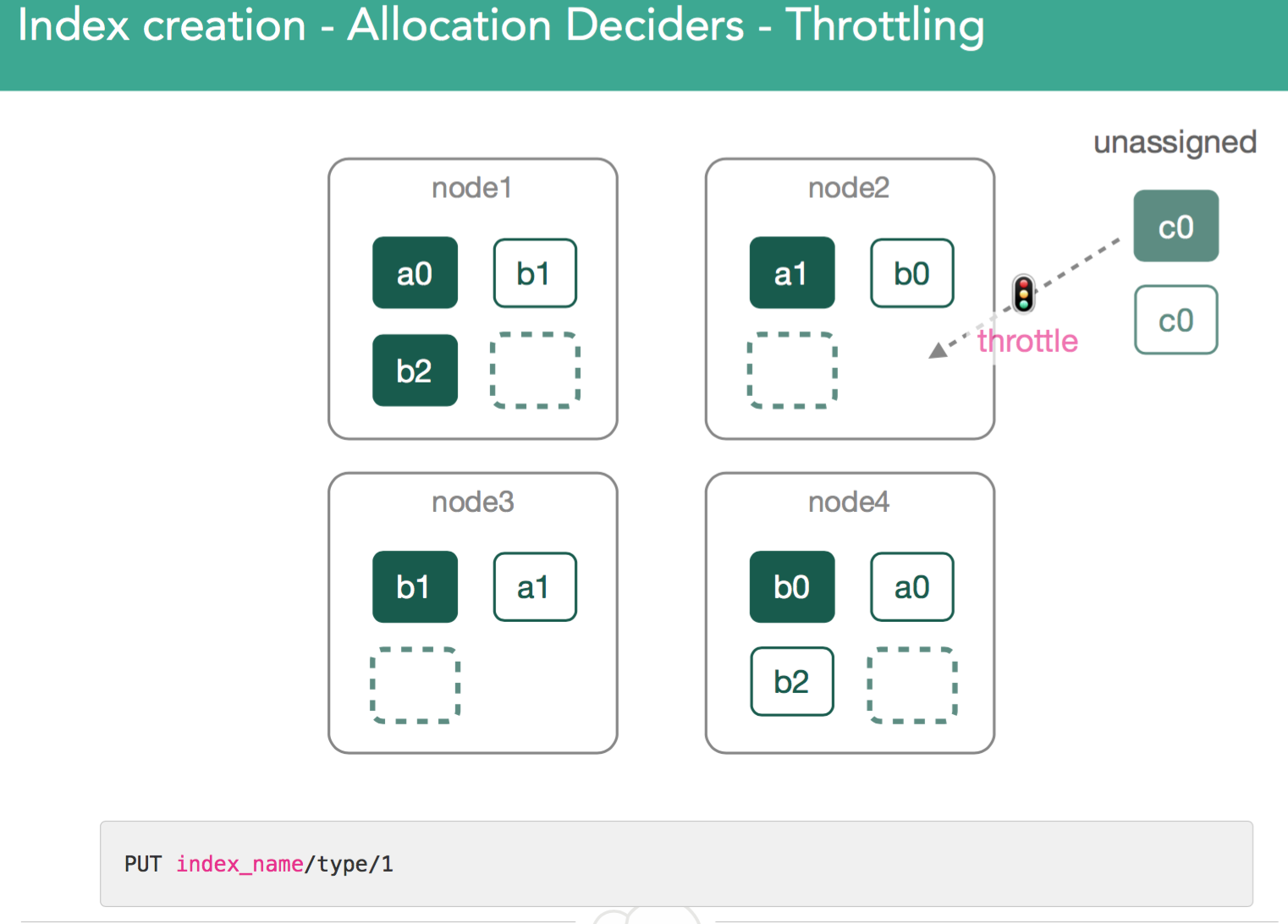
3. Throttles, which mean that in principle we can assign a shard to the node, but there are too many ongoing recoveries. To protect the node and allow recovery, the allocation decider can tell the cluster to wait and retry to assign the shard to the same node in the next iteration.
Shard initialization.
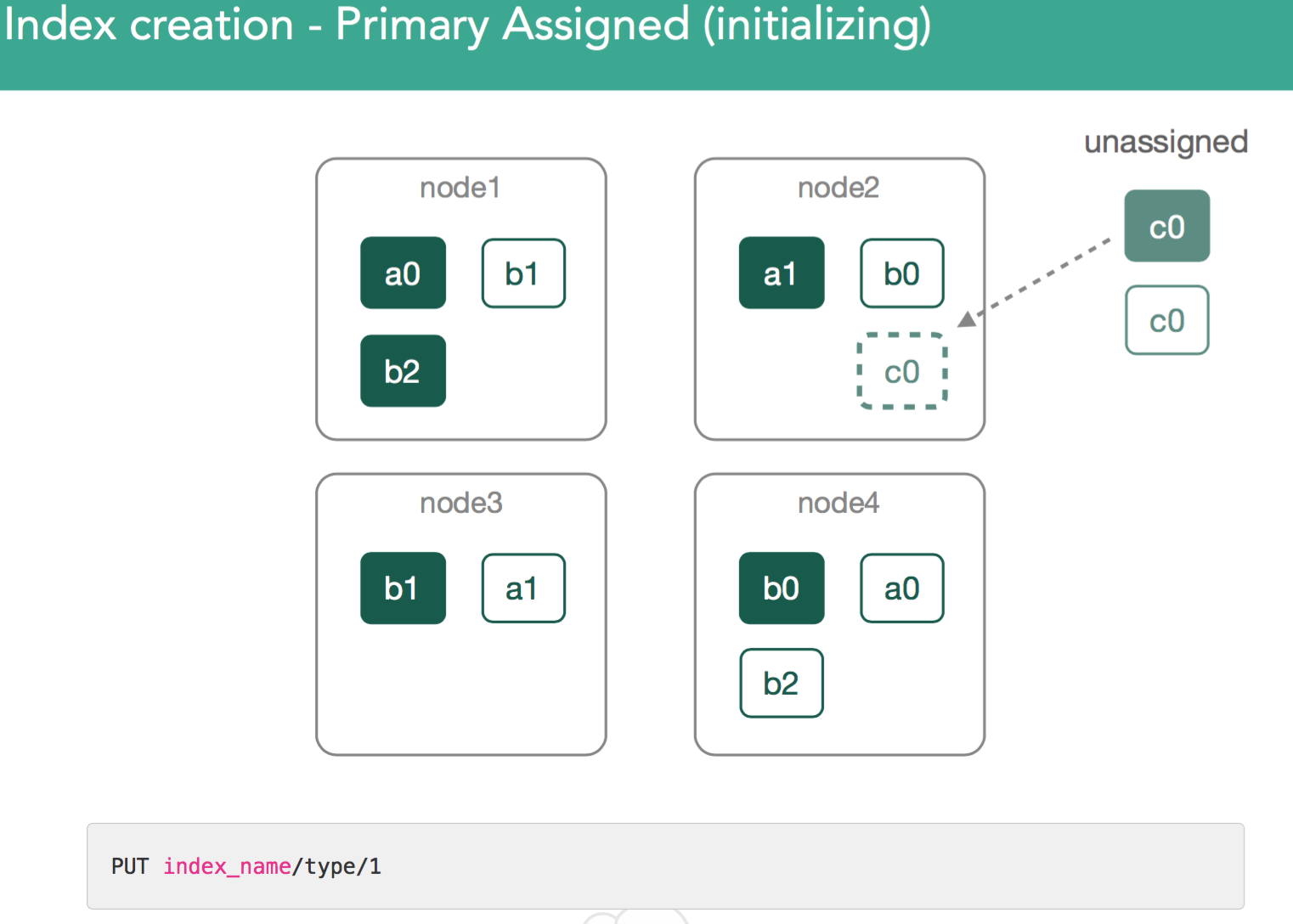
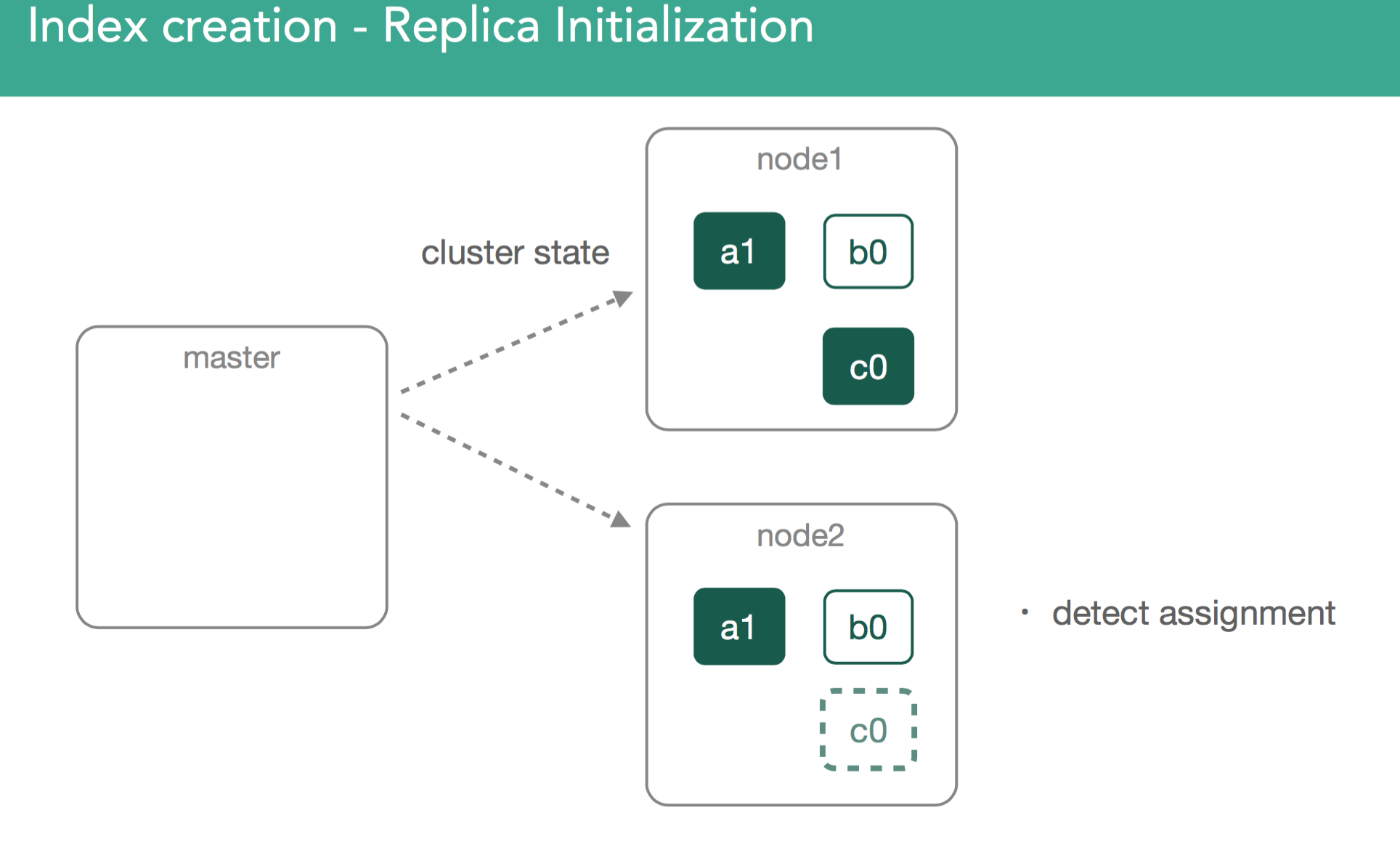
Once we've made a decision about where the primary shard belongs, it'll get marked as "initializing" and decision will be broadcast to cluster via a modified cluster state which is made available to all nodes within the cluster.
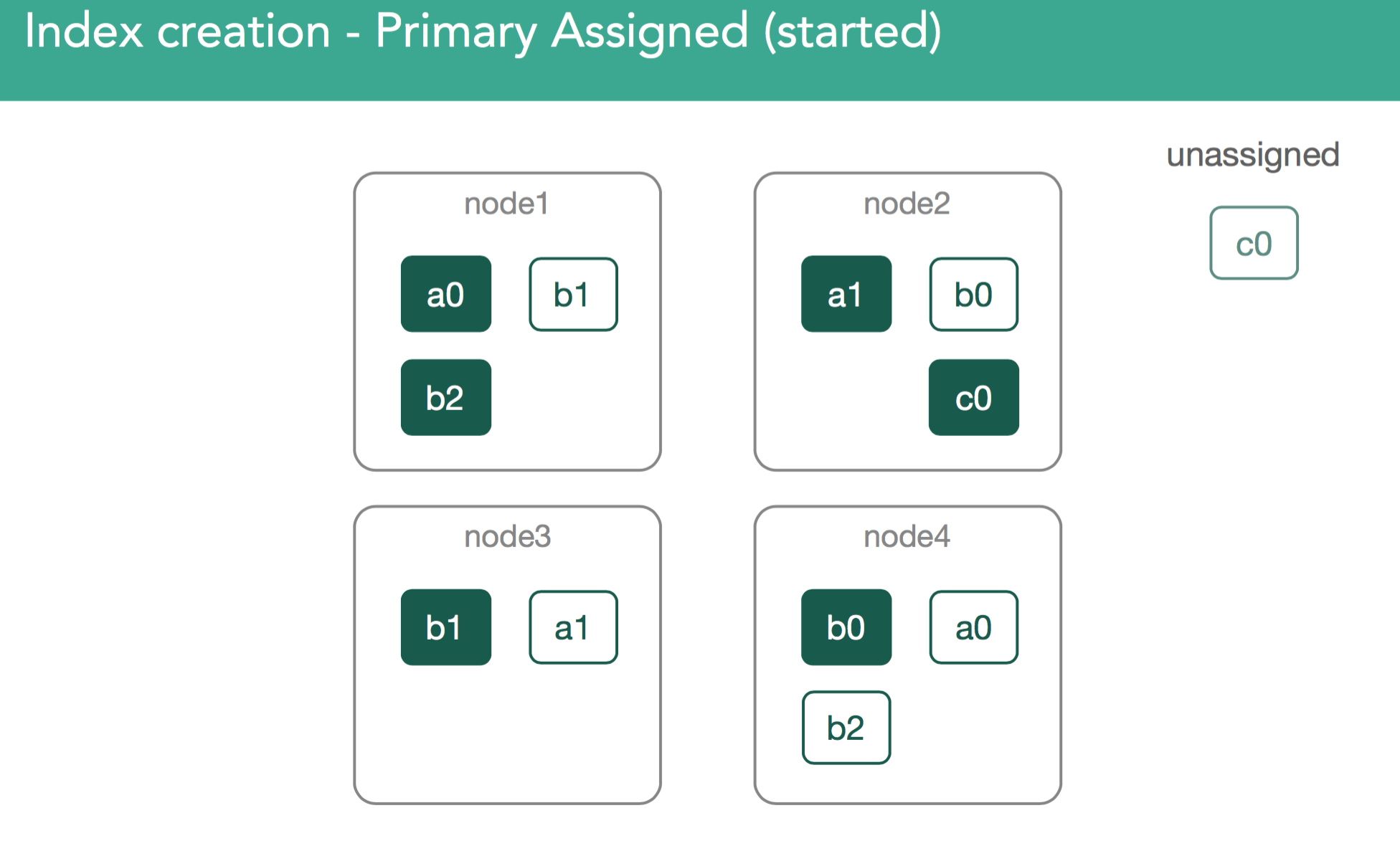
Once marked initializing, the node assigned will detect it was assigned the new shard. An empty lucene index will be created and once this is done the master will be alerted the shard is ready, master marks the shard as started, and sends out another modified cluster state. Once the node assigned the primary gets the updated cluster state it'll mark the shard as started. Because it's a primary, we'll now be allowed to index:
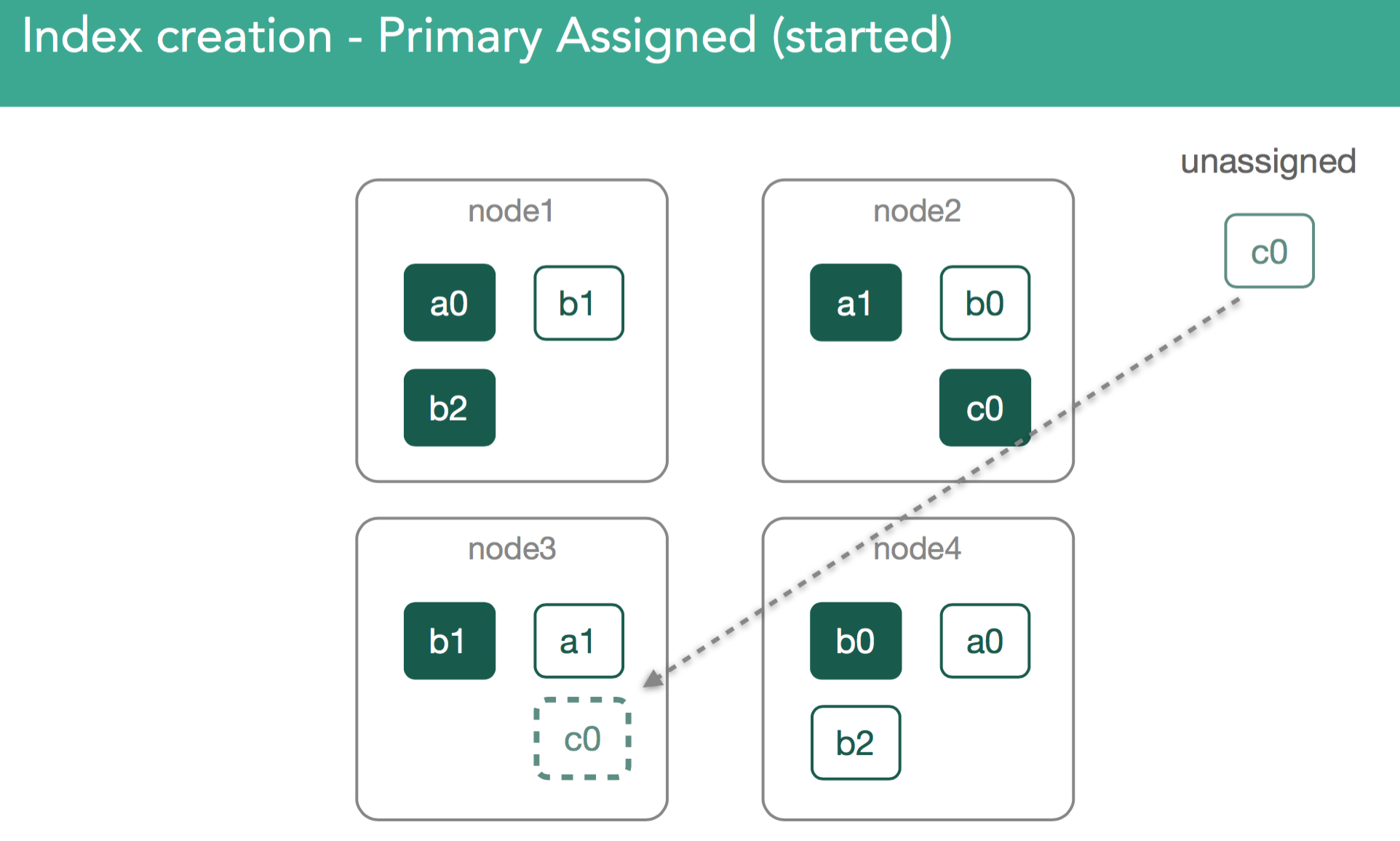
All of this communication, as you've seen, is done via modified cluster state. Once this cycle is complete, the master will perform a re-route and reevaluate shard assignment, potentially making decisions about what was throttled in the previous iteration.
In our example, the master now must attempt to assign the leftover replica, c0. This is also decision of the allocation deciders, which prevent replicas from being assigned until the primary is marked as started on the node containing it.
At this point, the re-balancing happens using the same process as describe above, with the goal of ensuring data balanced across the cluster, and in the case of this example we'll assign the c0 replica shard to node3 in the cluster in order to keep things balanced. This should leave us with 3 shards on each node in the cluster.
In our previous example, we just created an empty replica shard, which was a bit simpler than if we imagine we already have a started primary that already has data. With this in mind, we need to ensure the new replica has the same data as the primary.
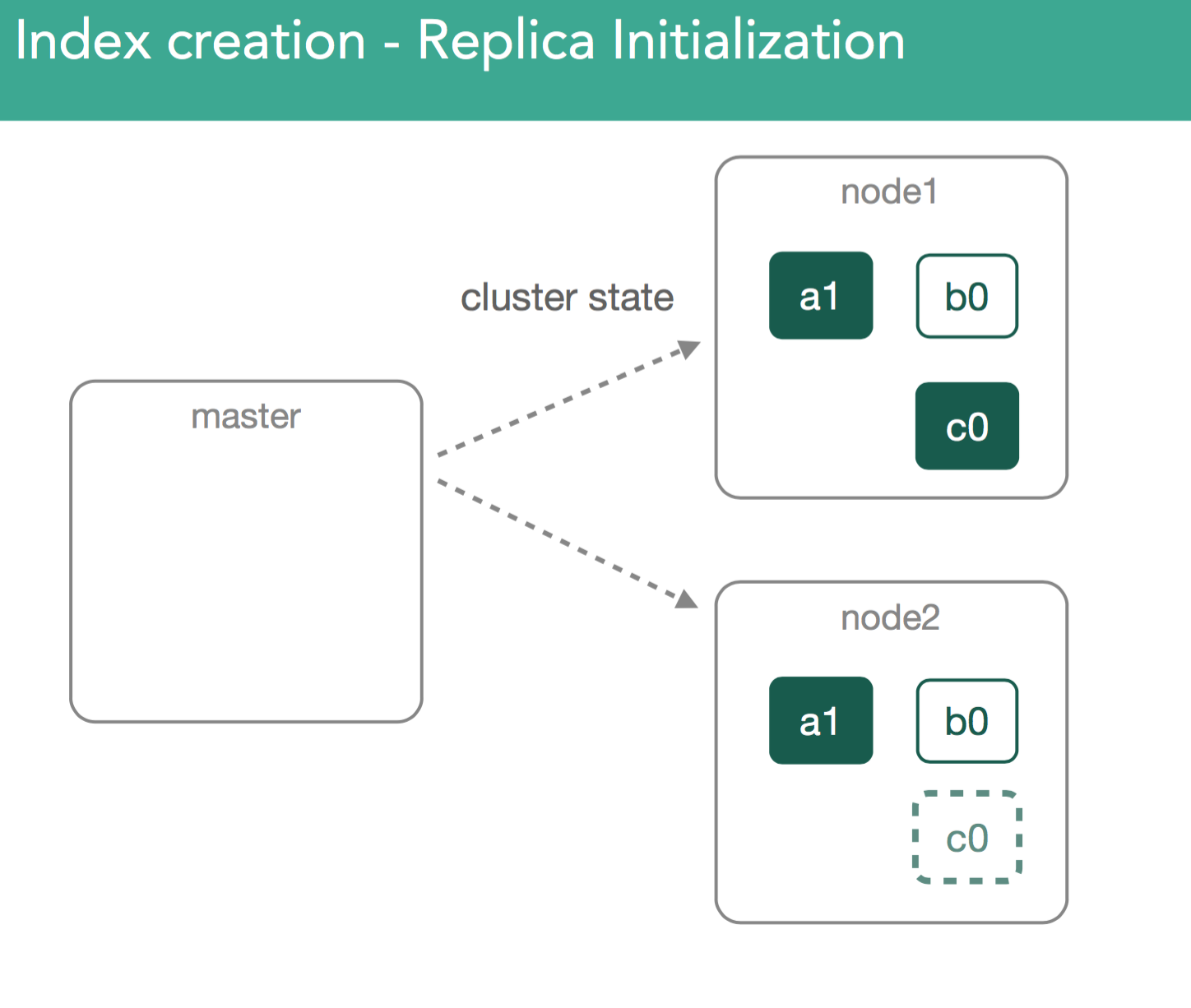
When replicas are assigned, it's important to understand we're going to copy any missing data from the primary back to the replica. After this, the master will again mark the replica as started and broadcast a new cluster state.
Scenario 2. Time to move a shard.
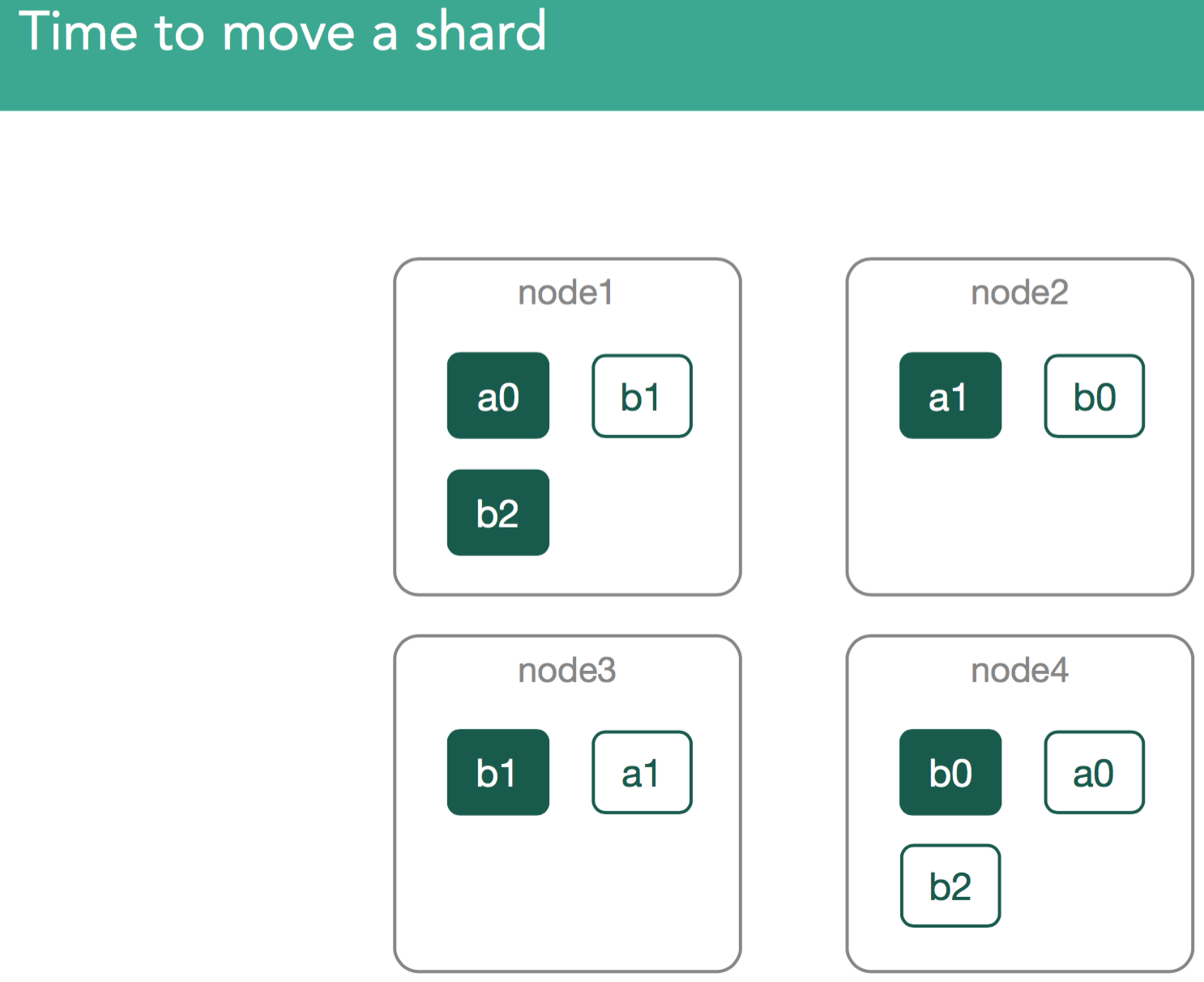
From time to time your cluster may need to move already existing shards within the cluster. This can happen for a number of reasons:
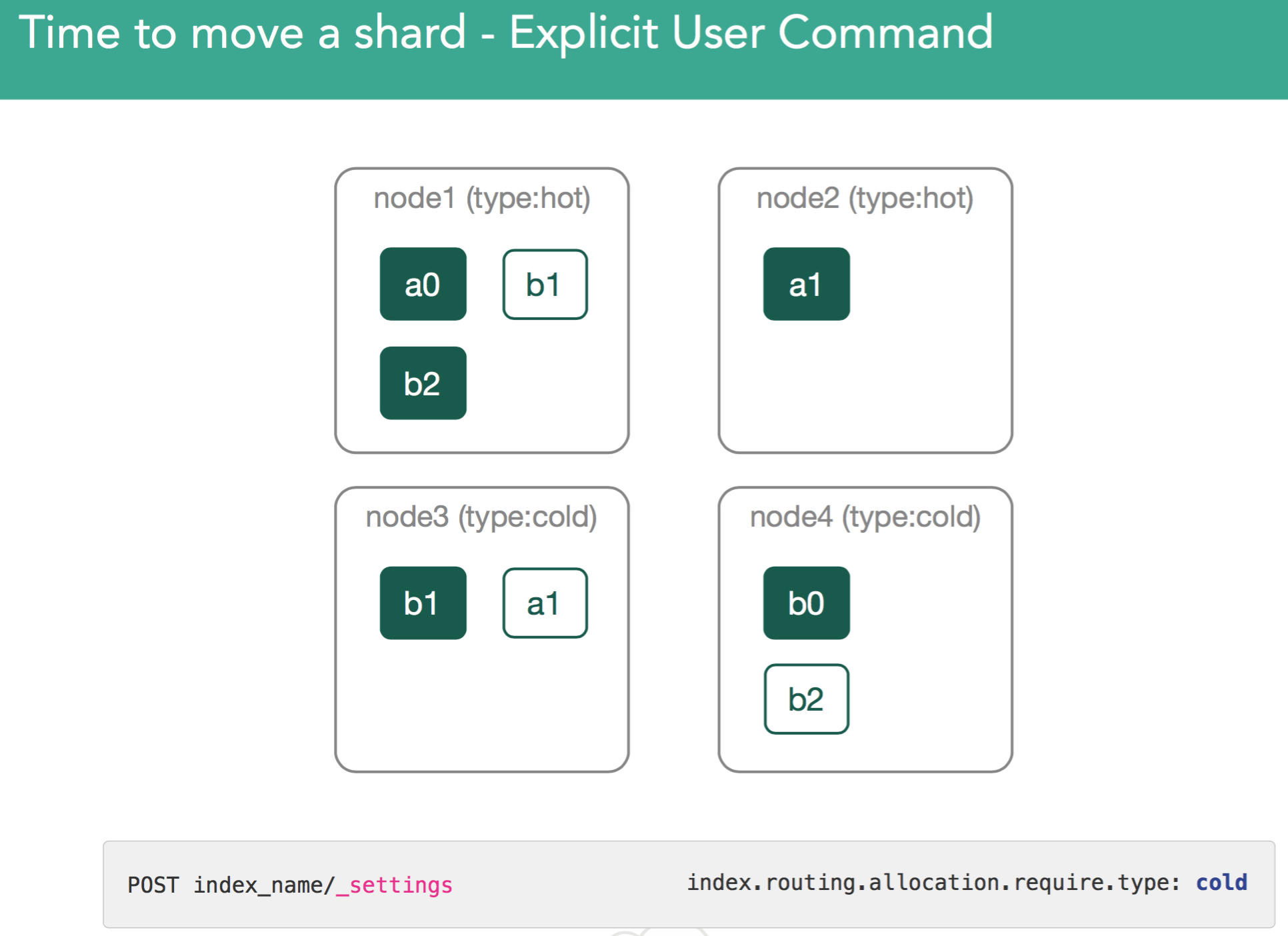
1. Explicit user configuration. A common example of this is a Hot/Warm configuration which moves data to slower disks as it ages:
2. User instructs elasticsearch to actually move a shard from one place to another for you with the cluster re-route command.
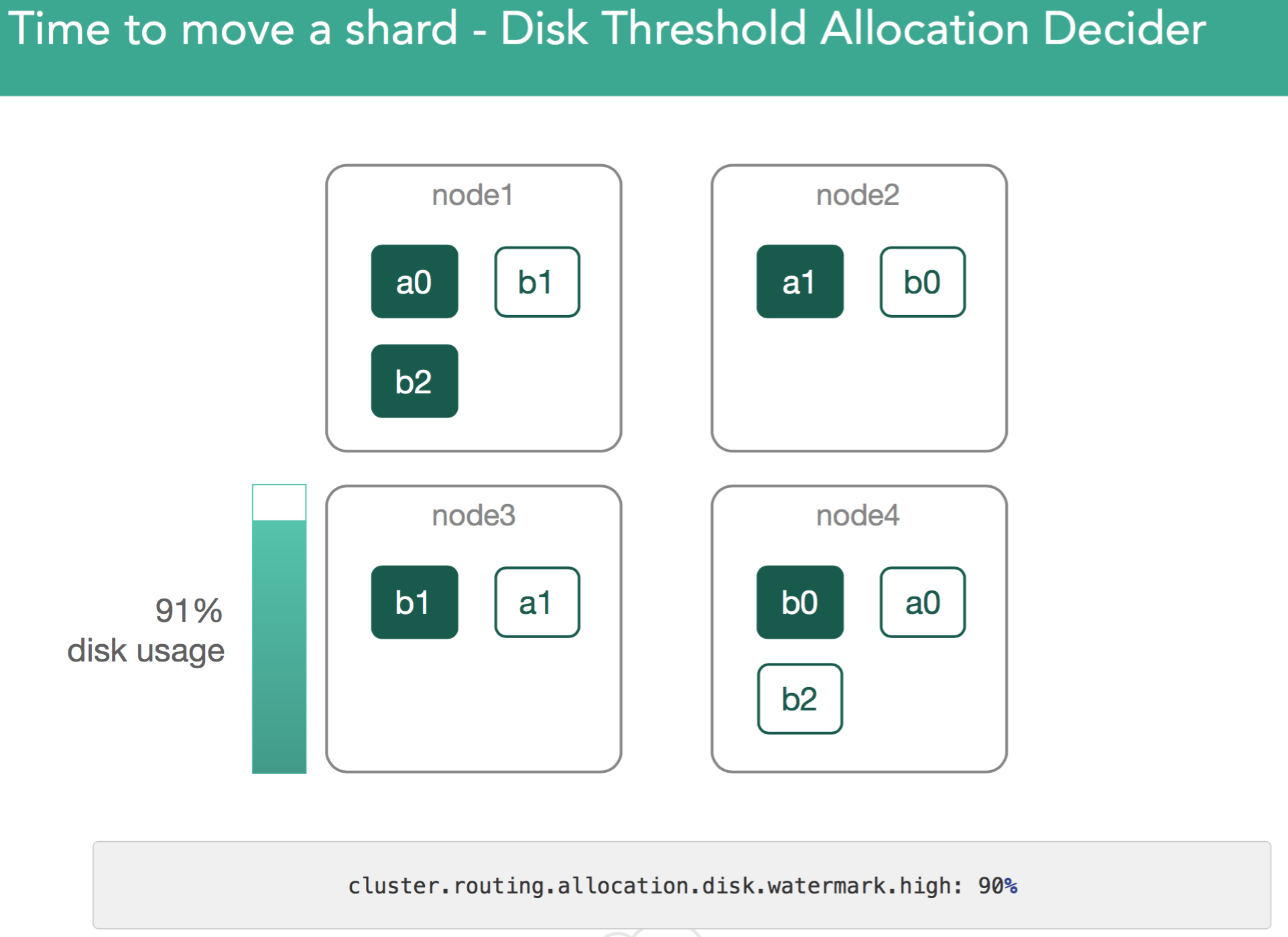
3. Allocation decider blocking on disk space because of exceeded thresholds for:
a. cluster.routing.allocation.disk.watermark.low
b. cluster.routing.allocation.disk.watermark.high
The low watermark prevents us from writing new shards when threshold is triggered. Likewise, the high watermark threshold the moves shards off the node until such time as disk space falls below the threshold.
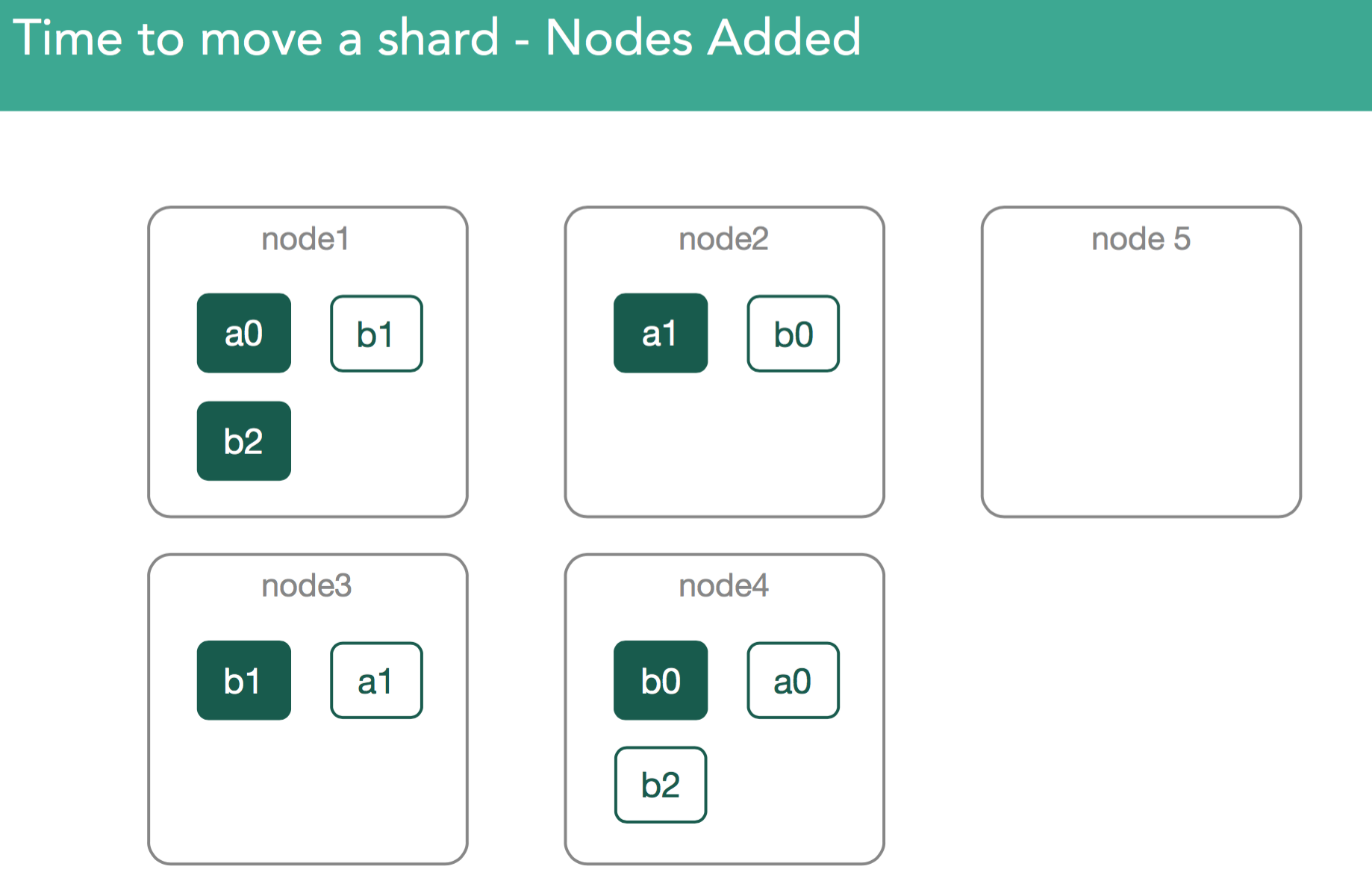
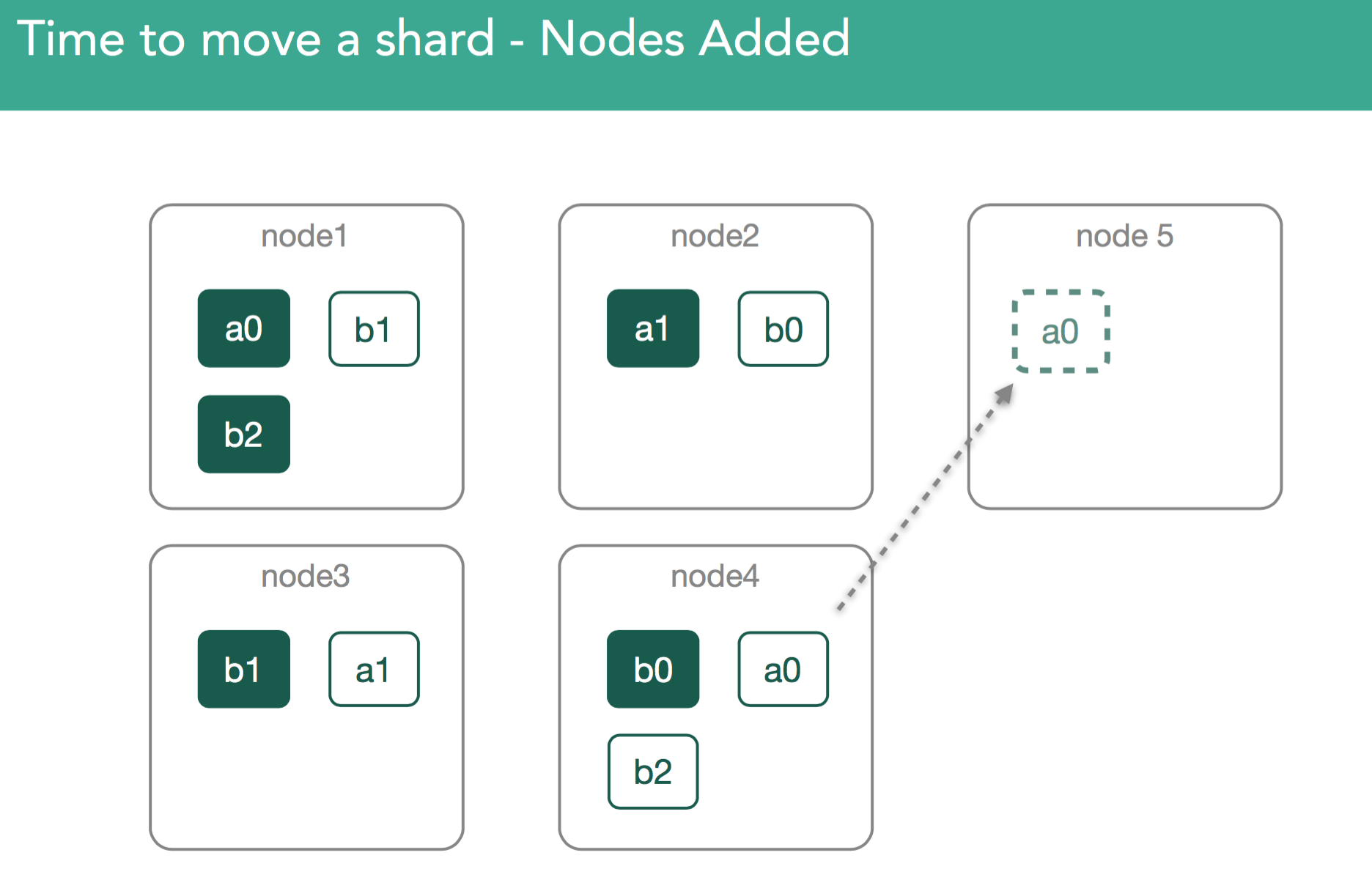
4. Nodes added to cluster. Maybe your cluster is at maximum capacity, so you've added a new node. Elasticsearch will attempt to rebalance the cluster.
Since shards may contain many gigabytes of data, moving these across the cluster could potentially have significant impacts on performance. In order for this process to be transparent to users, this has to happen in the background. The idea is to, as much as possible, limit impacts on other aspects of elasticsearch performance. Toward that end, a throttle(indices.recovery.max_bytes_per_sec/cluster.routing.allocation.node_concurrent_recoveries) is introduced to ensure that we can continue to index into these shards.
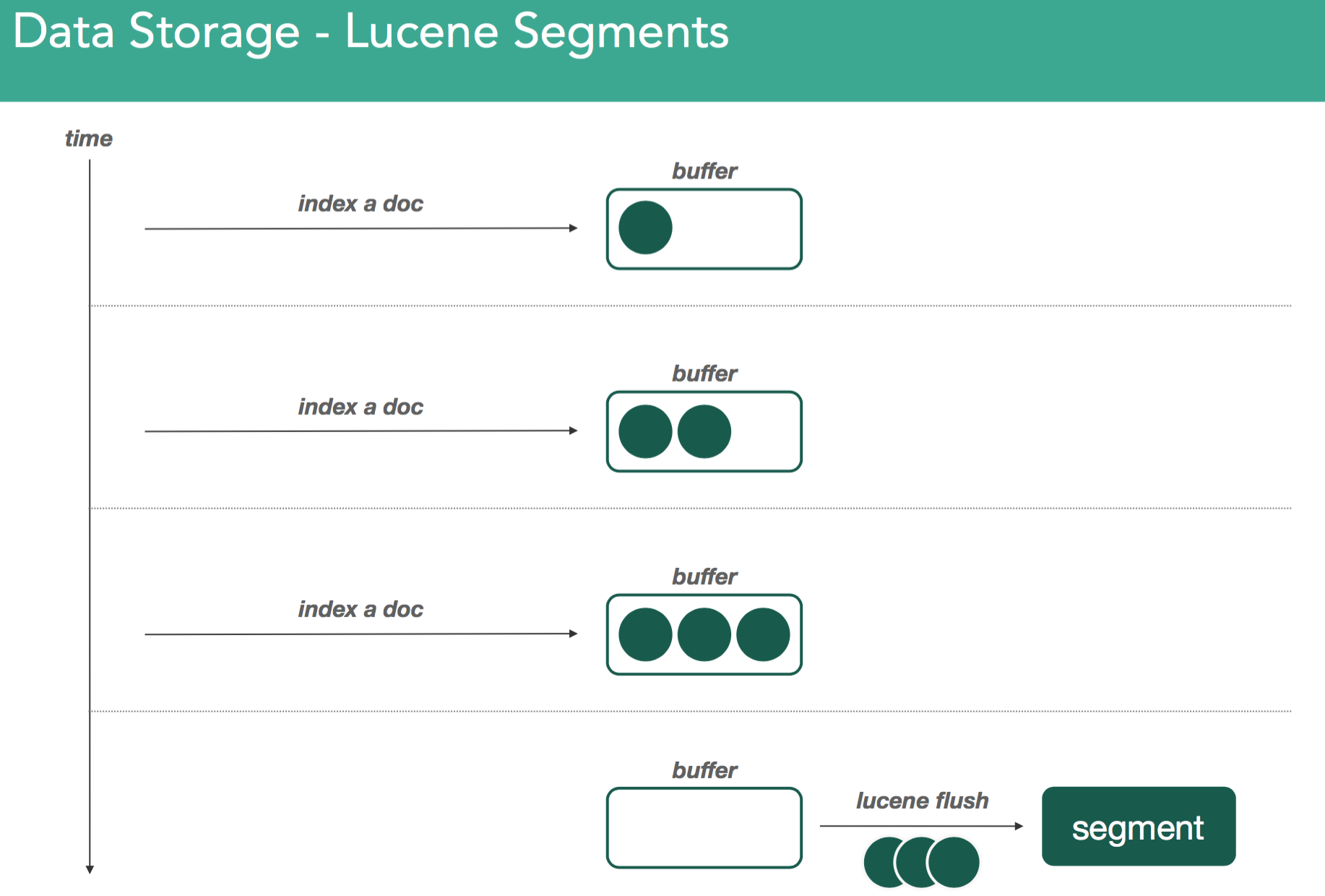
Remember, all elasticsearch data is stored through Lucene. Lucene contains a set of inverted indices in a set of files called segments. These inverted indices have a structure to tell you about where certain tokens/words appear within a set of documents. When indexing documents in Lucene, they're parked within an indexing buffer that sits in memory. There it sits until it a buffer becomes full, or in the case of elasticsearch, when something called a refresh is issued it forces all the data in the buffer into an inverted index called a segment.
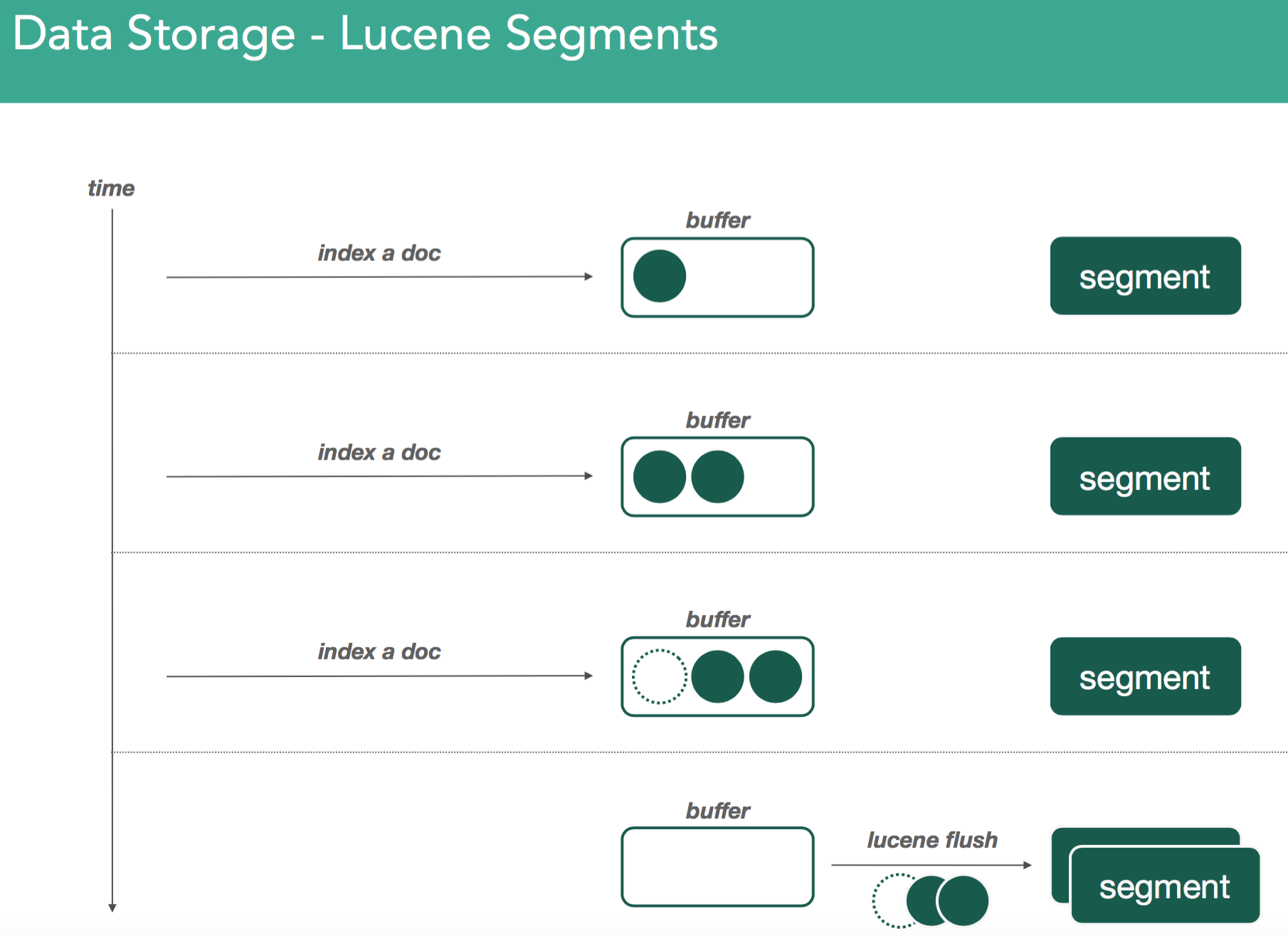
As we continue indexing, we create new segments in the same fashion. The thing about segments is they're immutable. Meaning, once you've written one, they don't ever change. If you issue a delete, or any change at all, it goes into a new segment where the same merging process happens again.
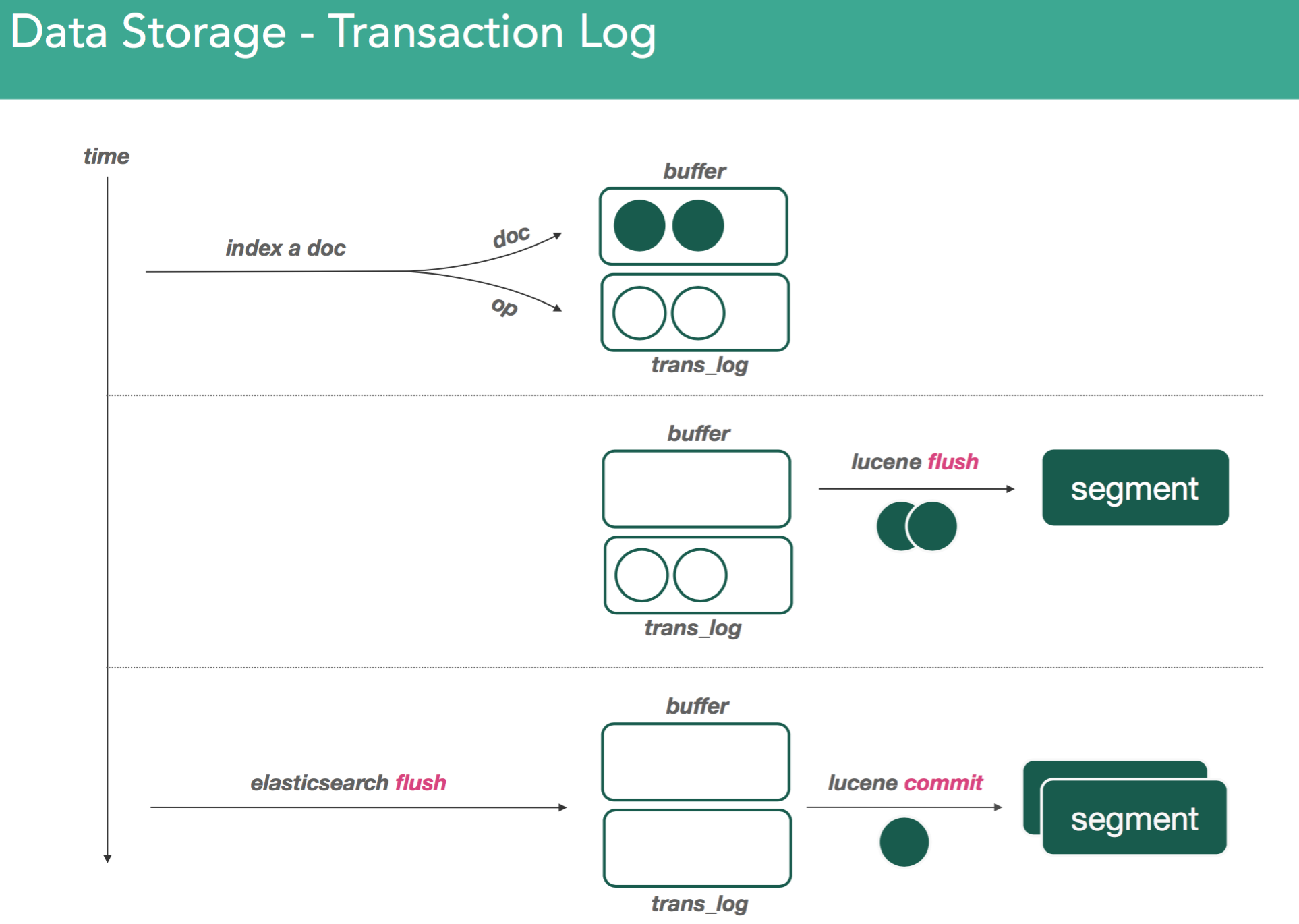
Since data is stored in memory, theoretically data could be lost before it's committed into a segment file. To mitigate this, elasticsearch makes use of a transaction log. Whenever a document is indexed into lucene, it's also written to the transaction log.
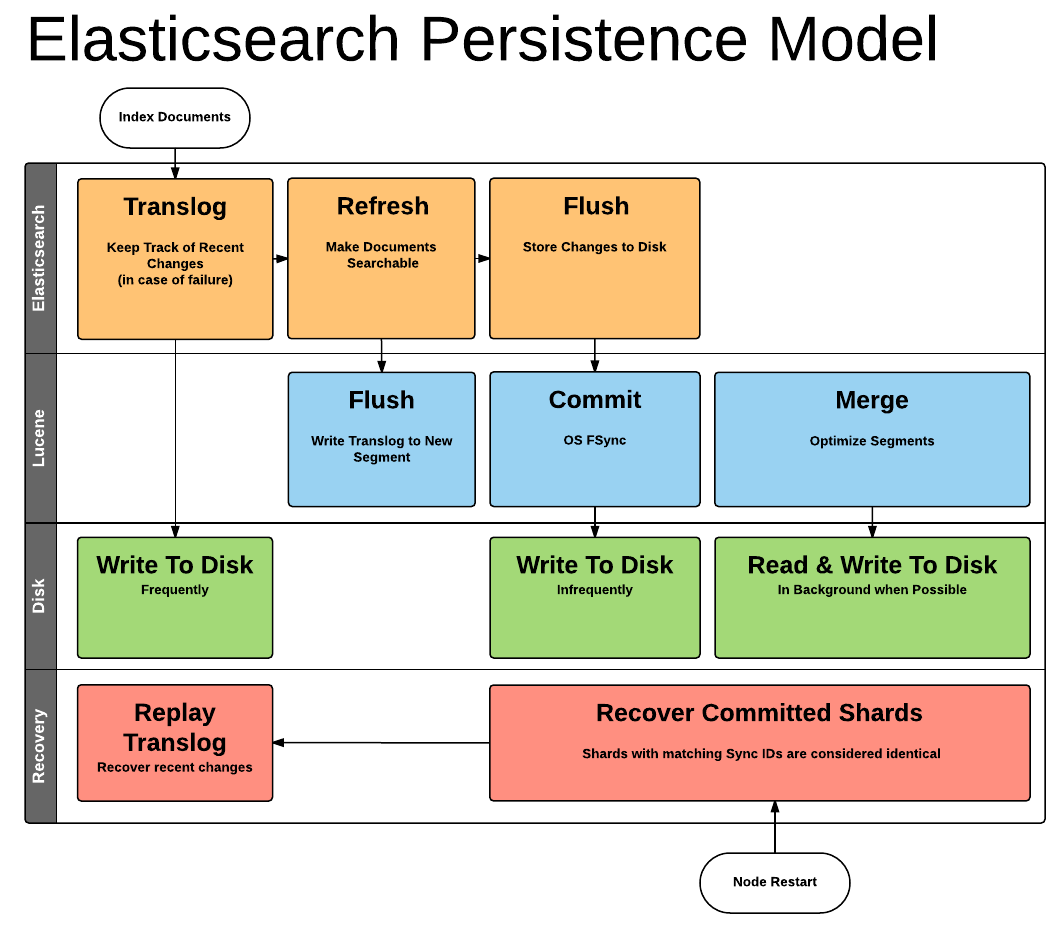
The transaction log is written sequentially, with the last request at the end of the file. The transaction logs allow us to recover documents which may not have made it into lucene.
It's possible for us make a segment without fsyncing, allowing the filesystem to keep in memory or pending flushes to disk. This is done for performance reasons, and because of this the transaction log needs to be cleaned. This is done with an elasticsearch flush.
On issuing elasticsearch flush, lucene commit, which does 2 things:
- Take everything in buffer and commit it to disk in new segment
- Goes through all segment files and asks the file system cache to persist to disk using fsync.
This allows us to flush the transaction log and guarantees we have all the data. For relocation, if we capture a given set of segments and keep them around we have a point in time consistent and immutable snapshot of our data.
In our example, when the cluster wants to move a0 from node4 to node5, first the master does it by marking shard a0 as relocating from node4 to node5. Node5 interprets this as an initializing shard copy on itself. An important thing to note around this behavior is that while rebalancing is happening it may appear a replica is being moved from node4 to node5, when relocating data it will always be copied from the primary shard(node1).
In the example below, we have an empty node5 and a node with the primary, node1. Keep in mind the two data storage mechanisms we mentioned previously, the transaction log and the lucene segments. We're illustrating Node5 responding to a request from the master to initialize a shard after reading an updated cluster state. Node5 goes to node1 and ask to start a recovery process. Node1 will then validate it knows about the request that node5 is making. Once a request is found, elasticsearch will pin the transaction log to prevent it from being deleted and take a snapshot in lucene, ensuring that we capture all the data within the shard. Once we do this, we can start sending segments over to the target file. This all happens in the background, so you can still index into the primary shards during this process. Once that happens, we'll replay the transaction log to ensure whatever wasn't in the segments is now captured.
Now the question comes up, when do we stop? People can still index into primary shard, which means that the transaction log grows. In 1.x, we locked the trans log and from that point on all incoming requests are blocked until we finish replaying the transaction log.
In 2.x/5.x, we're better. As soon as we start relocation, primary will start to send all indexing operations to the new primary(node5). Since we know when we did the lucene snapshot, and when the shard was initialized, we know what exactly to replay from the transaction log.
Once recovery is done, the target nodes sends notification that the shard is ready to it's master. Master processes request, copies remaining primary data, and activates shard. It can then be removed from the source and the process repeats until rebalancing is completed.
Scenario 3. Full Cluster Restart
The next scenario we'll look at is a full cluster restart. This is a scenario in which we're not dealing with active segments, but finding data locally on each node.
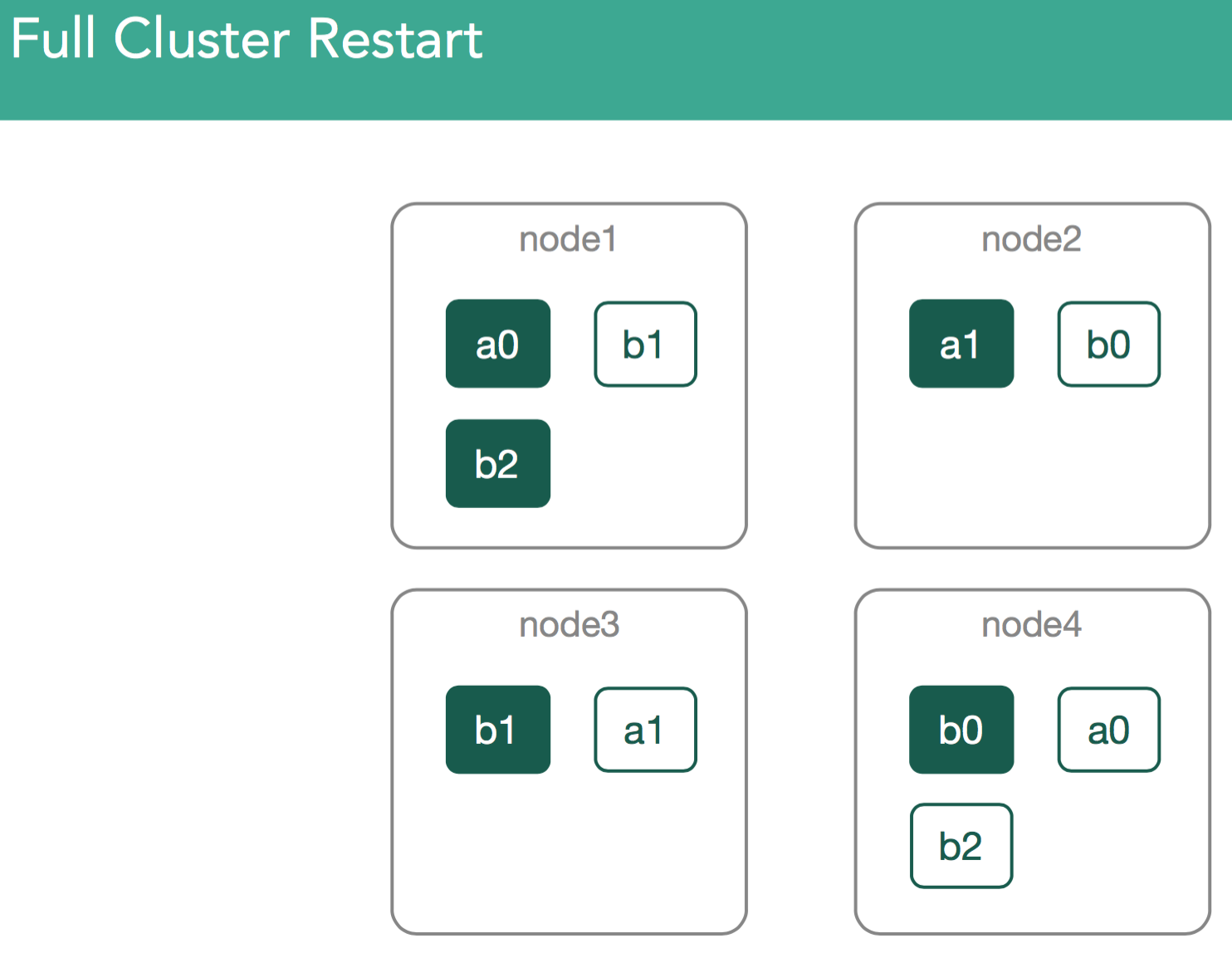
This covers things like Maintenance cycles, upgrades, anything related to planned maintenance.
Here our Master is elected, then a cluster state is created or restored from disk. Now we have a list of shard that need to be assigned. Unlike newly indexed data, these shards can't be assigned anywhere as they've previously been assigned. That means we'll have to go find the data and make sure we open the lucene indices we've previously created.
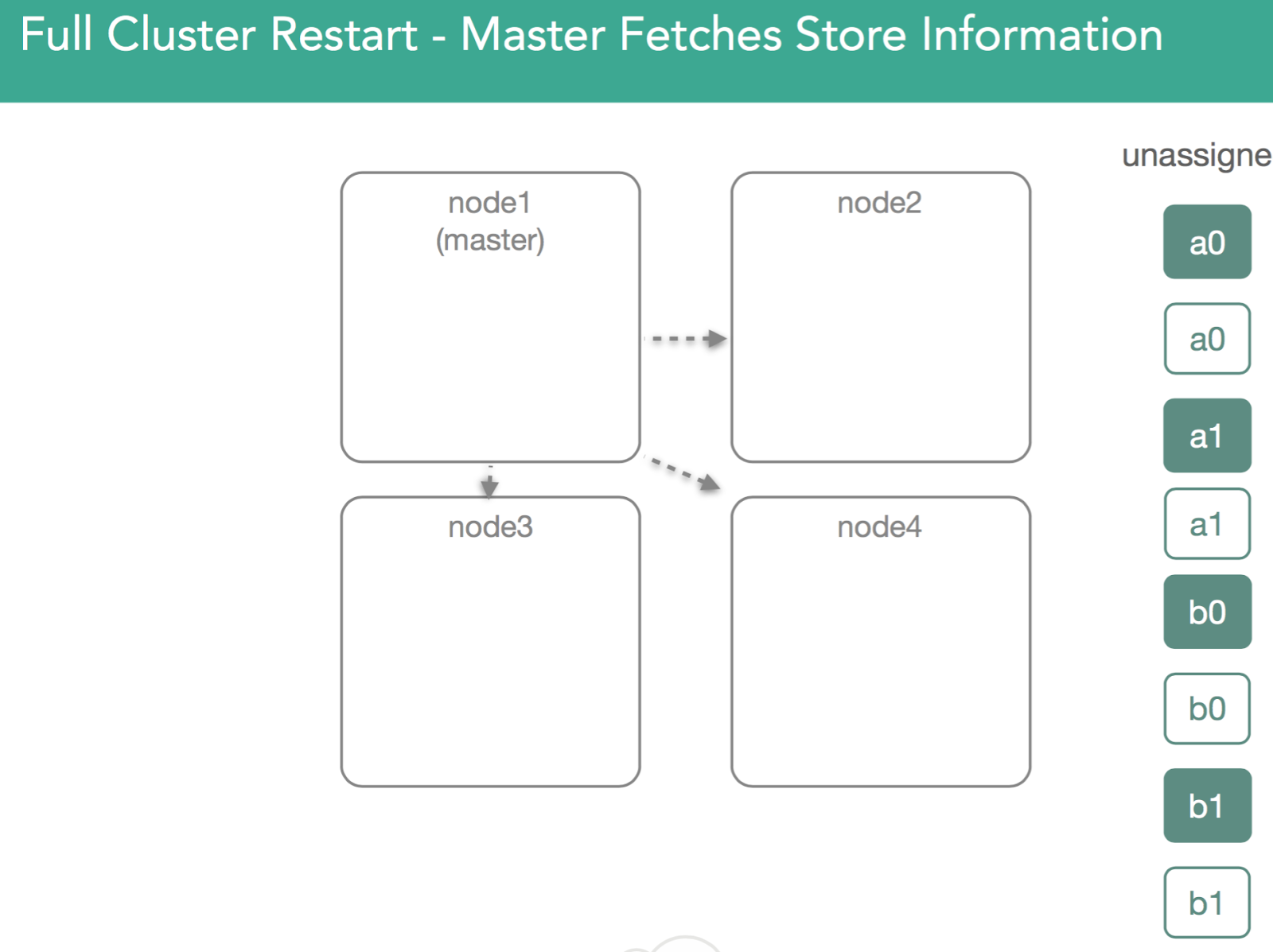
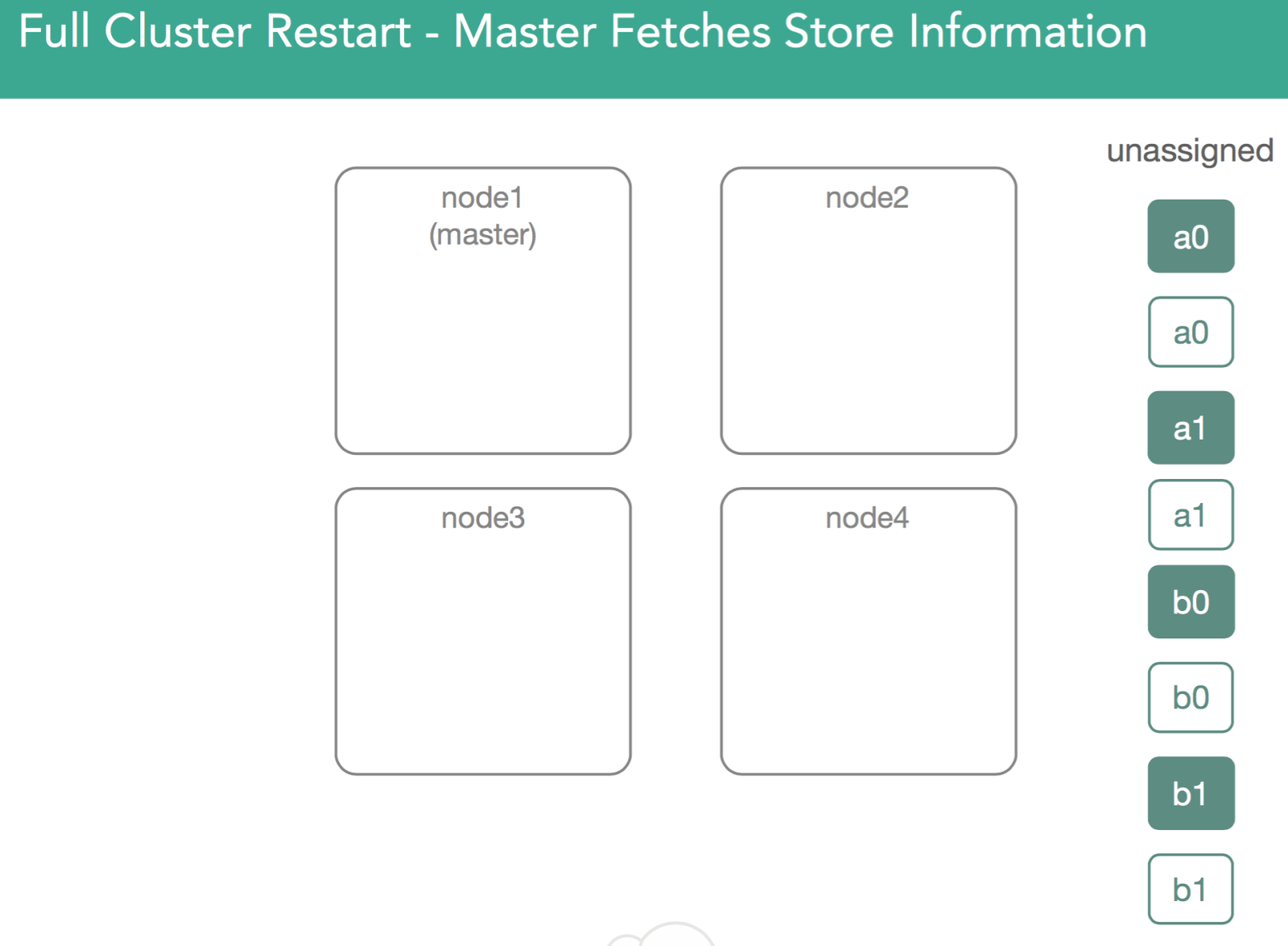
To do this, the master reaches out to the nodes to assign a primary and asks for a list of everything on disk. That means we physically open the segments and then respond to the master with a confirmation of a shard copy. At that point the master will decide who gets the primary. In 5.x, we introduced preferences for previous primaries(optimization).
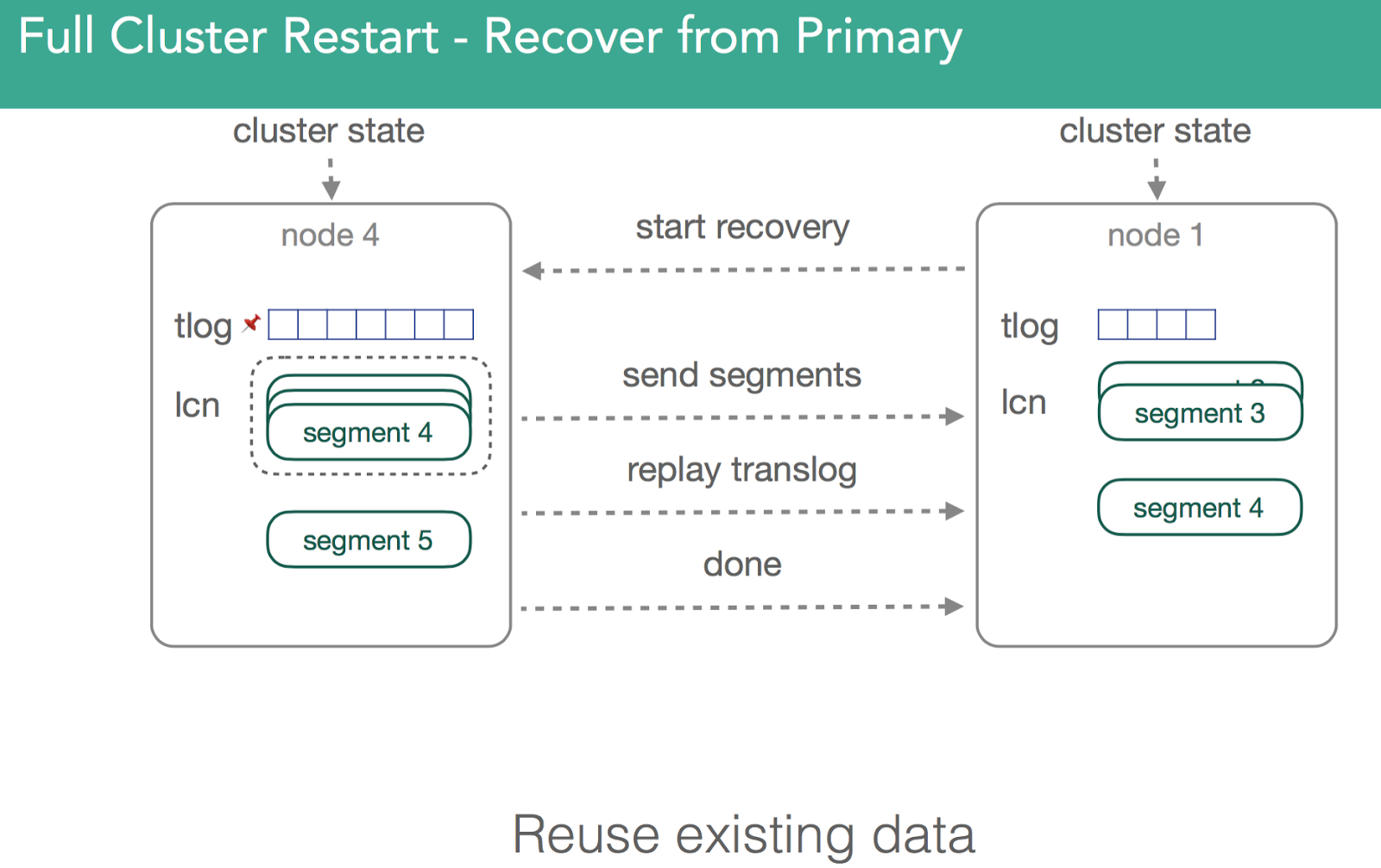
Below, we can see that shard a0 on node1 had previously acted as primary, but potential exists for any valid copy to become primary. In this case, node4's shard is marked as initializing, but what's different is this time we know we're supposed to use existing data and can look at our nodes lucene indices to validate they're valid and can be opened. The Master is notified that the shard is ready, shard is assigned, and the master adds that assignment to the cluster state.
In order to validate the data is the same on both shards, we go to a process similar to relocation except that because all copies of the shard are restored from disk, they may already match and no shards would need to be transferred.This process is described in more detail here.
Because segments are independent lucene indices, after heavy indexing there is a strong likelihood they're going to be different on disk vs the same segments on other nodes. Some of them will use more resources than others, some of them will have nosy neighbors.
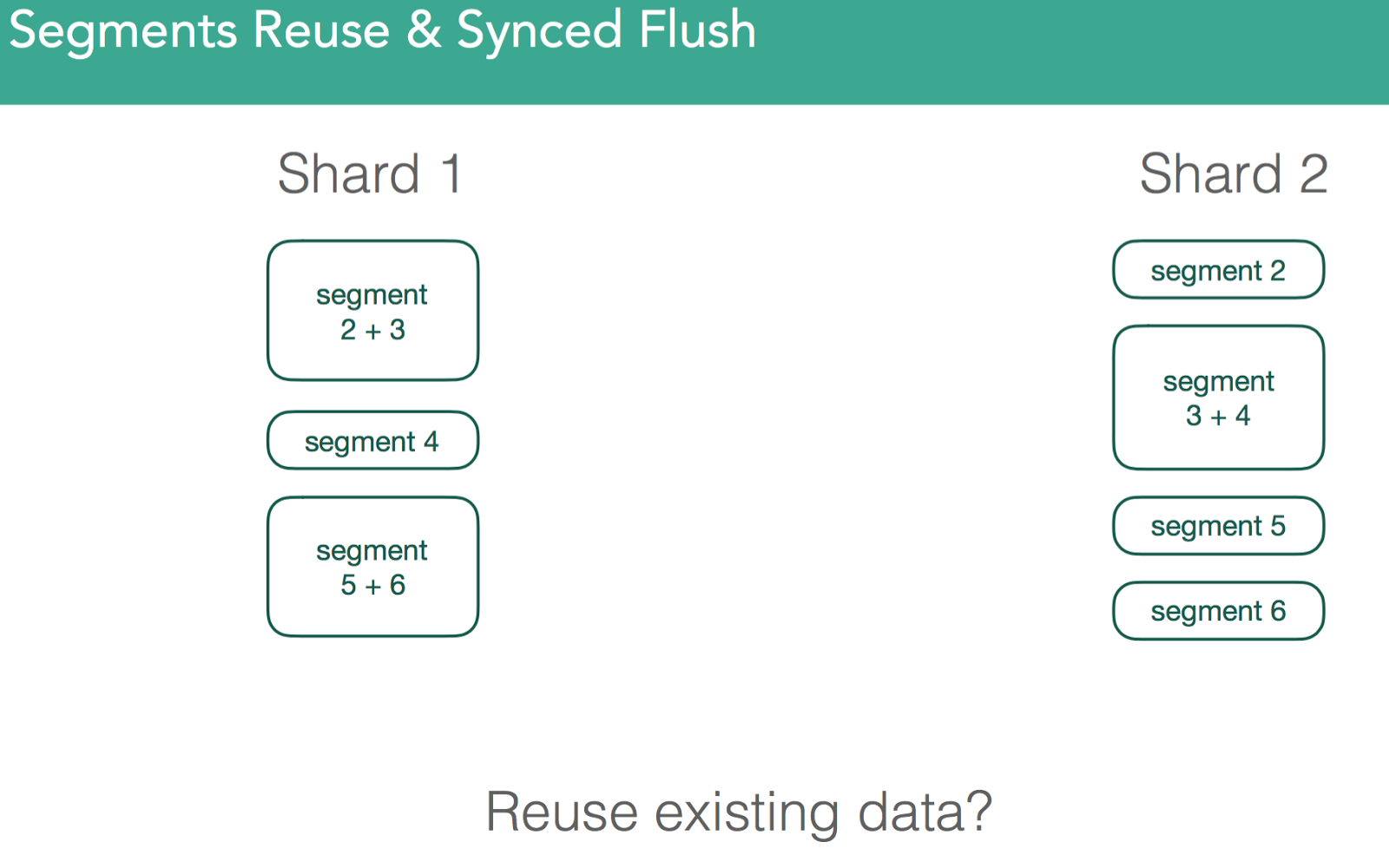
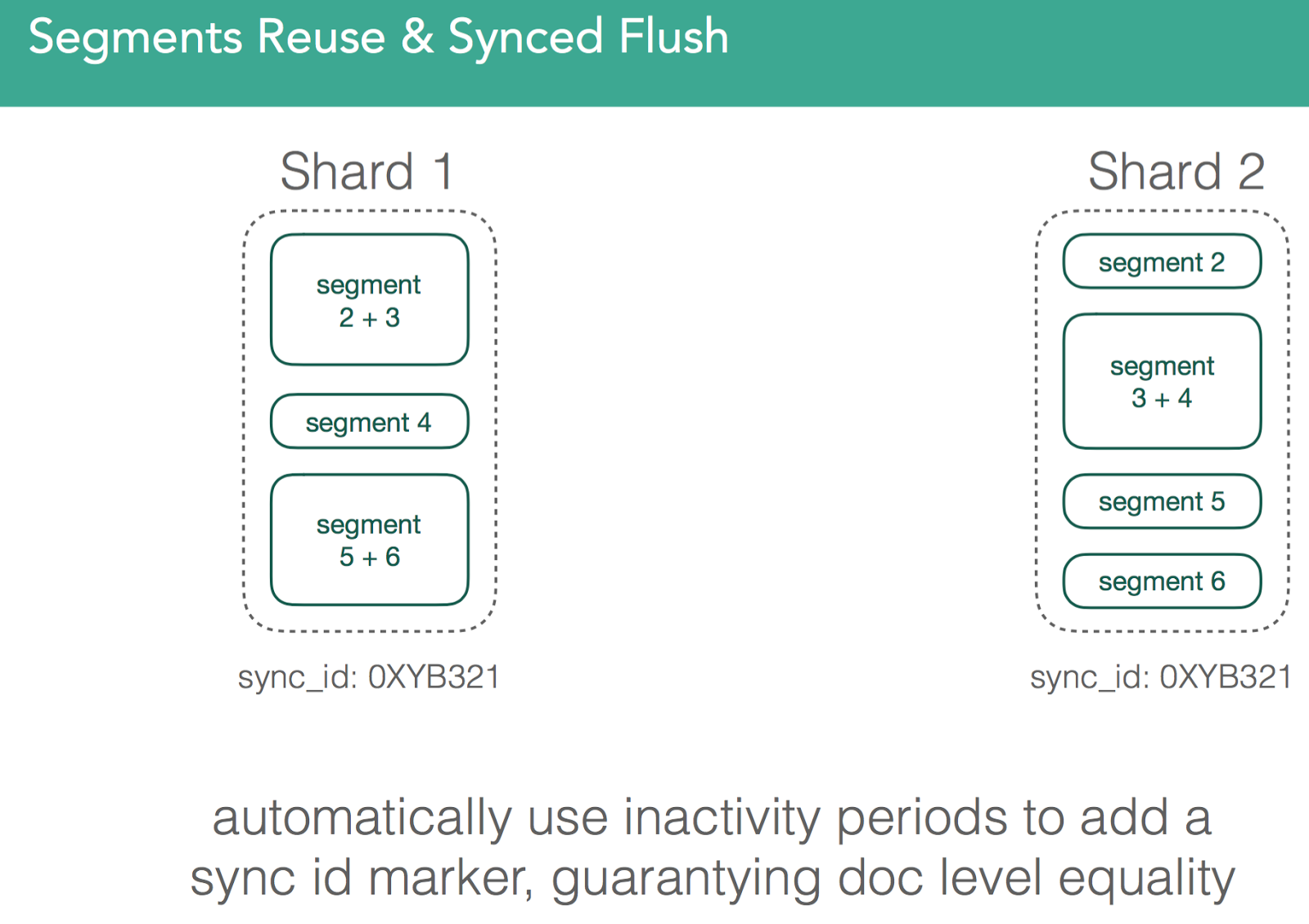
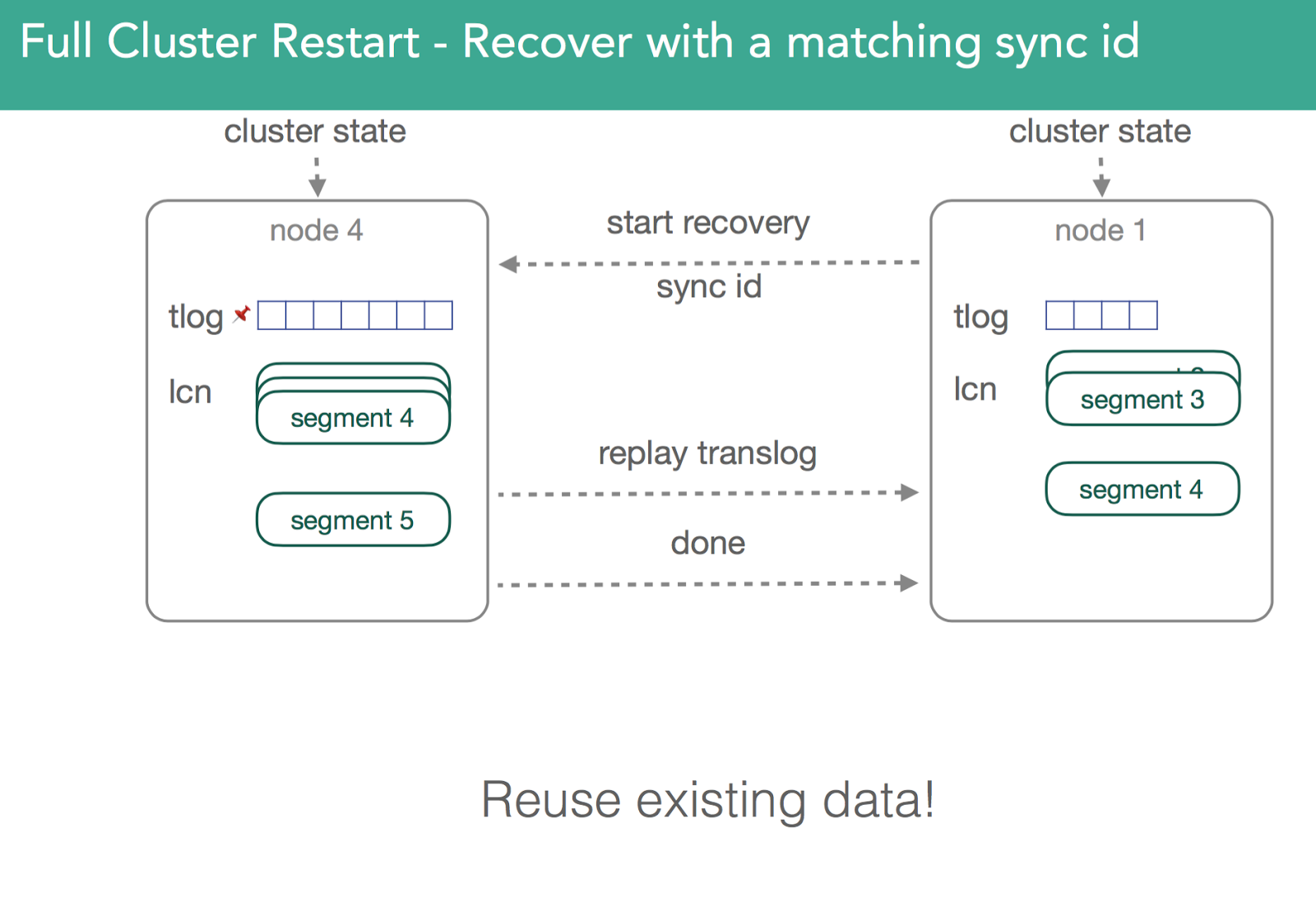
Prior to 1.6, all segments had to be copied over. Because of this, recoveries prior to 1.6 were slow. We have to sync primary and replica, but can't use any local data. To deal with this we added sync_flush and sync_id. It's a way of taking a moment when no indexing is occurring, capture the information with a unique identifier, guaranteeing the data is identical between copies of the same shard. So when we go to recovery, we send the sync_id to act as a marker, and if it matches it won't copy the file over and will reuse old copies. Because segments in lucene are immutable, this can only be done for inactive shards. NOTE: below the image shows the same shard on separate nodes, the copy numbers are what change.
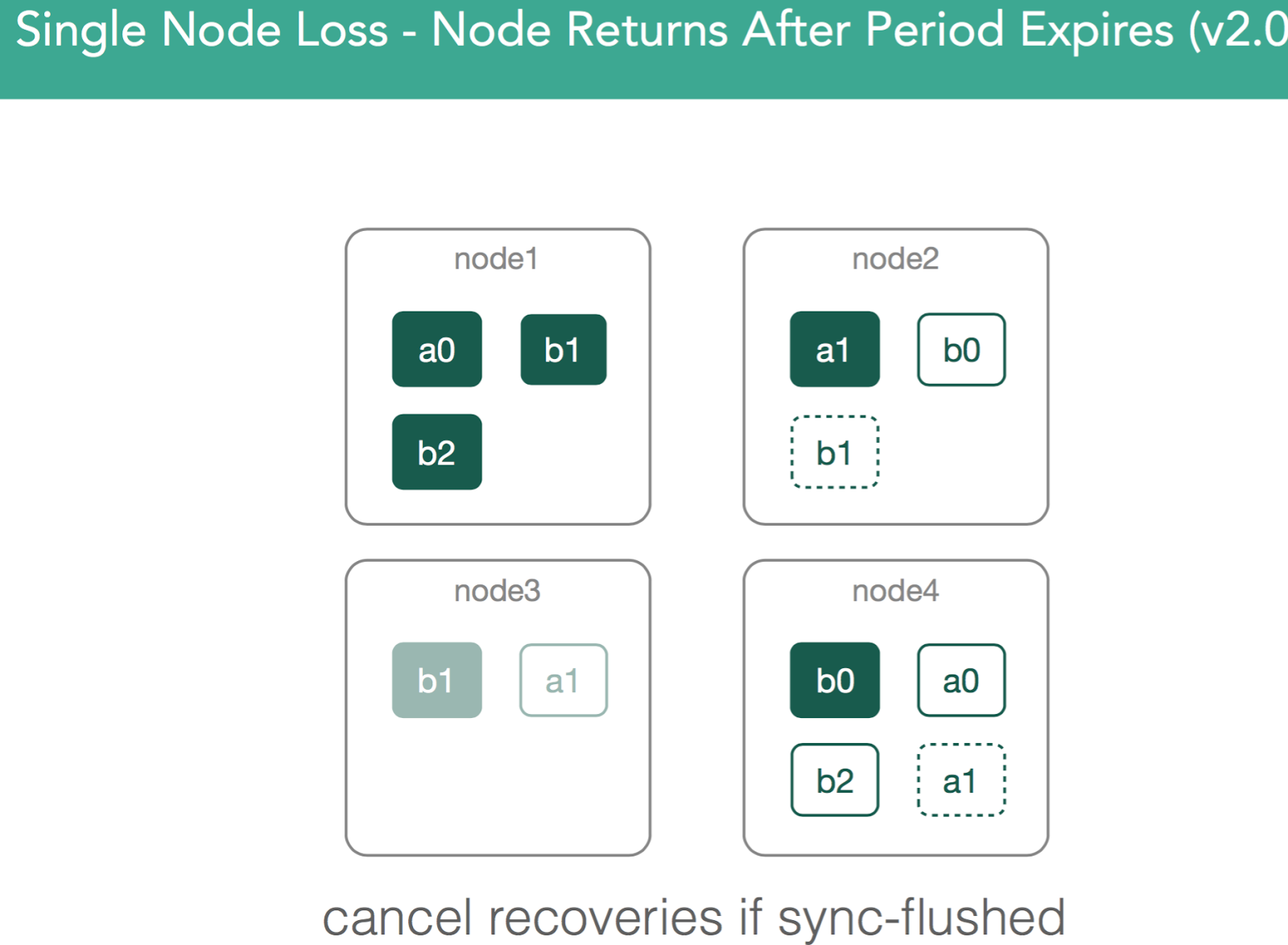
Scenario 4. Single node Loss on node3.
In the figure below, node3 is removed from the cluster, and with it, the primary copy of shard b1. The first, immediate step is that the master will promote the single replica of b1, currently on node1, to be the new primary. The health of that index, as well of the cluster, is now yellow, because there is a shard which doesn't have all of the shard copies allocated (as indicated by the user in the index definition). Hence, the master should attempt to allocate a new replica copy of that shard to one of the other remaining nodes. If node3 left because of a temporary network disruption (or a long pause of the JVM due to garbage collection), and there is no additional indexing of the shard before the disruption passes and the node returns to the cluster, replication of the shard to another node during its absence will have been a wasteful use of resources.
In v1.6, a per-index setting was introduced (index.unassigned.node_left.delayed_timeout, defaults to 1m) to address this issue. When node3 leaves, re-allocation of the shard will be delayed for this period. If node3 returns before this, the shard copies will be compared, and if the primary hasn't changed in the interim, the copy on node3 will be designated as the replica. If it has changed, the shard will be re-replicated to node3.
In v2.0, an improvement was added so that, if node3 returns after the delayed_timeout, for any shards on node3 that still match the primary copy(based on the sync_id marker), any replications that have been initiated will be stopped, and the copy on node3 will be designated the replica.



 浙公网安备 33010602011771号
浙公网安备 33010602011771号