从三种算法剖析网络流本质
模板题:
简要题意:
给定一个网络图,求其网络最大流(下简称 最大流)。
网络图的定义:每条边 \((u,v,w)\) 表示 \(u \rightarrow v\) 的 流量 为 \(w\),流量可以理解为,单位时间内能流过的最大的量。
最大流的定义:从源点开始到汇点,在让 单位时间内每条边流过的量不超过其流量 的情况下最大的运输量。(汇点即终点,源点即起点)
在实际生活中,网络流(就研究最大流)问题可以理解为 供水系统 。以样例为例:
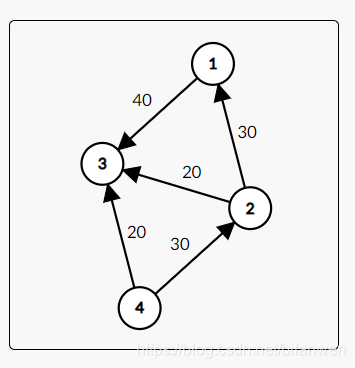
供水公司 的编号为 \(4\),你家的编号为 \(3\),而 中转供水处 只负责转运。网络图如图所示。
由一只聪明的猴子掌控着一些操作:即某某供水处往某某供水处运了多少水,而 水管的大小不同,流量也不同;如果流过的水超过水管的流量会直接渗出 ,所以产生了上面这个图。当然供水公司本着 赚更多钱 运更多的水(但不浪费水)的角度,希望供到你家尽量多的水。
这只猴子把 \(4\) 号节点放 \(50L\) 水出去,其中 \(20L\) 通过 \(4 \rightarrow 3\) 这条边直接供向了你家。而 \(30L\) ,先是通过 \(4 \rightarrow 2\) 这条边,到达了 \(2\) 号中转供水处。
然后 \(30L\) 又分作两份,\(20L\) 从 \(2 \rightarrow 3\) 流过,剩余 \(10L\) 顺着 \(2 \rightarrow 1 \rightarrow 3\) 也到达了你家。
这是,你家就有了 \(50L\) 的水。
如果从 \(4\) 号节点流出了超过 \(50L\) 水,那么 \(4 \rightarrow 3\) 和 \(4 \rightarrow 2\) 这两条边无法承受流量。所以 水在水管里渗掉了,最终还是降为 \(50L\),浪费了水。
综上,该网络图的最大流 为 \(50\).
那么,如何解决网络流问题呢?
首先抛出一些定义便于说理,括号中是便于理解的说法。
-
设原网络图的点集为 \(V\).(由中转处,供水公司和你家构成)
-
割:将原图中所有顶点分成两个集合 \(S\) 和 \(T = V - S\) ,其中源点 \(s\) 在集合 \(S\) 中,汇点 \(t\) 在集合 \(T\) 中。如果把起点在\(S\) 中,终点在 \(T\) 中的边全部删除,就无法从 \(s\) 到达 \(t\) 了。这样的集合划分 \((S,T)\) 称为一个割。(即将 \(V\) 分成两部分,使得如果把所有横跨两部分的水管删去,一滴水也到不了你家,比方说上图中,\(S=(4)\) 和 \(T=(1,2,3)\) 就是一个割,因为 \(4 \rightarrow 3\) 和 \(4 \rightarrow 2\) 的水管被删掉之后,供水就断了。可以理解成是 有向图中的割边(不严谨))
-
割的容量:即所有 \(u \rightarrow v (u \in S , v \in T)\) 的流量之和。(即横跨两集合边的流量之和)
-
最小割:所有割中容量最小的那个。比方说上图中,\(S=(4),T=(1,2,3)\) 就是最小割。
-
最小割最大流定理:最大流等于最小割。具体证明因过于复杂略。(其实可以理解成,有一个 恐怖分子 想让你家喝不到水,他希望割断最短的水管而达到这个目的;那么如果 割掉这些水管可以导致供水系统崩溃并且它是最小的话,很显然,能供向你家的水就是这些水管的流量和了。如果比这个和小,肯定有更小的割;如果比这个和大,那么说明 还有其它水可以不通过这些水管流过,这就不是割了,也矛盾。大概是这样的,感性理解吧,不太严谨)
-
残余网络:即所有 实际流量与流量的差 构成的网络图。(就是如果这个水管能流过 \(x\),但种种原因使得它只流过 \(y (y \leq x)\),那么用 \(x-y\) 构成网络图)
一种可能求最大流的方法是:采用 和 \(\text{Dijkstra}\) 类似的流法,在残余网络中搜索松弛。没错!
引入
基于最短路中的松弛概念,我们考虑和最短路一样的做法。但是看这个图:
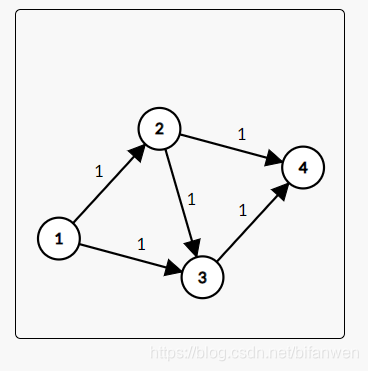
聪明的猴子选了 \(1 \rightarrow 2 \rightarrow 3 \rightarrow 4\) 这条边之后,流量是 \(1\).
但是 你并不能把这条路上流量清 \(0\),因为明明存在 \(1 \rightarrow 2 \rightarrow 4\) ,\(1 \rightarrow 3 \rightarrow 4\) 这两条可以流量为 \(2\) 的路径。
猴子发现自己错了,然后尝试了所有路径……它对自己的杰作感到满意。
可是你会满意么?尝试所有路径是指数级的 爆炸性复杂度,实在无意义(不过 \(30 \%\) 的数据可以拿下,但对正解无益)。
也就是说,我们要想到一种 可以让程序反悔 的操作。
下面就引入了 \(\text{Ford-Fulkerson}\) 算法,简称 \(\text{FF}\) 算法。
算法一 \(\text{Ford-Fulkerson}\)
\(\text{FF}\) 的操作是:
-
当前不断寻找增广路(即不断搜索能继续流的路)
-
到汇点即有了一条路径,统计答案。然后将这条路径上所有边的流量减掉最终流量,建立反向边的边权为最终流量,构成残余网络。(你似乎明白残余网络是干什么的了)
-
不断寻找直到找不到为止。
还是上面那个图:
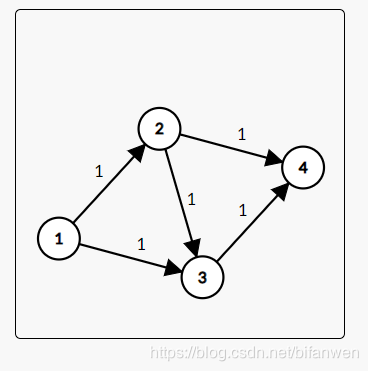
假设聪明的猴子还是找到 \(1 \rightarrow 2 \rightarrow 3 \rightarrow 4\) 这条边。流量为 \(1\),它就会将 路径上所有水管的流量减少 \(1\),将其反相边流量增加 \(1\).这样的操作我们称为 “反悔” 操作。 一次之后变成了:
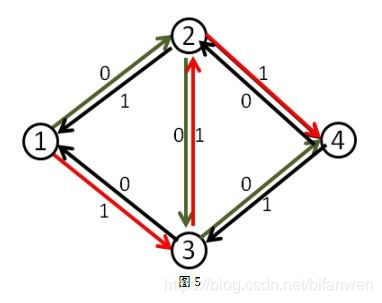
然后猴子又找到了 \(1 \rightarrow 3 \rightarrow 2 \rightarrow 4\) 这条路径,两个答案 \(1\) 的和为 \(2\).
然后再 反悔一次 从 \(1\) 流不出水,所以结束,答案为 \(2\).
感性说明(不严谨):
最终流量为 \(x\),那么 \(u \rightarrow v\) 减少 \(x\) 可以理解为:\(u\) 现在不想走这条边,想要实施别的增广,那么 给 \(v\) 维持输出 的同时收回自己的流量,反悔了一次;接着 走过这条反向路 的路径,显然 和之前的路径都走过这条 \(u \rightarrow v\),所以说不影响答案。
因此,\(\text{FF}\) 算法的精髓在于反悔操作,对于当前图不断进行增广,反悔,最终得到答案。
程序实现过程不同,但效率是一样的。
比方说,\(\text{FF}\) 算法是 在流的过程中,判断能否流,然后边流边反悔 的,用 \(\text{bfs}\) 实现,时间复杂度为 \(O(n \times m^2)\).
而另一个 \(\text{Edmonds–Karp}\) 算法(下简称 \(\text{EK}\) 算法)是通过不断 \(\text{bfs}\) 实现的,时间复杂度也为 \(O(n \times m^2)\).
注:由于各种各样的常数问题,LOJ #101. 最大流 上面跑 \(\text{EK}\) 能过,\(\text{FF}\) 过不了;而本题是 \(\text{FF}\) 能过,\(\text{EK}\) 过不了。(那题要用 \(\text{long long}\))
所以实践告诉我们,还是 dinic 比较稳定 算法的时间复杂度也有一部分取决于常数。所以本题两篇代码都给出。
\(\text{EK}\) 算法:(\(\text{LOJ}\) 满分,洛谷 \(70\))
#pragma GCC optimize(2)
#include<cstdio>
#include<queue>
#include<iostream>
#include<algorithm>
#include<cstring>
using namespace std;
typedef long long ll;
const ll INF=1e18;
const ll N=1e2+1;
inline ll read(){char ch=getchar();ll f=1;while(ch<'0' || ch>'9') {if(ch=='-') f=-f; ch=getchar();}
ll x=0;while(ch>='0' && ch<='9') x=(x<<3)+(x<<1)+ch-'0',ch=getchar();return x*f;}
queue<ll> q; ll flow[N],ans; // flow[i] 是当前最大流量
ll n,m,s,t,g[N][N],pre[N]; // pre[i] 记录前驱 , 利于反悔
inline ll bfs(ll s,ll t) { //增广一次
while(!q.empty()) q.pop();
memset(pre,-1,sizeof(pre));
pre[s]=0; q.push(s); flow[s]=INF;
while(!q.empty()) {
ll u=q.front(); q.pop();
if(u==t) break;
for(ll i=1;i<=n;i++)
if(g[u][i]>0 && pre[i]==-1ll) {
pre[i]=u; flow[i]=min(flow[u],g[u][i]);
q.push(i); //可以增广则更新一次 , 类似于 dijkstra
}
} return (pre[t]==-1ll)?-1ll:flow[t];
}
inline void EK(ll s,ll t) {
ll x=0;
while((x=bfs(s,t))!=-1ll) { //只要增广路存在则继续
ll k=t; while(k!=s) {
ll l=pre[k];
g[l][k]-=x; g[k][l]+=x;
k=l; //反悔 , 一次次迭代路径
} ans+=x; //记录答案
}
}
int main(){
n=read(),m=read(),s=read(),t=read();
while(m--) {
ll u=read(),v=read(),w=read();
g[u][v]+=w;
} EK(s,t); printf("%lld\n",ans);
return 0;
}
\(\text{FF}\) 算法:(\(\text{LOJ} \space 75pts\) (不过因为出题人把所有测试点放在一个 \(\text{Subtask}\) 所以是 \(0\) 分,但 实际上是 \(75pts\)),洛谷 \(100pts\)).
#pragma GCC optimize(2)
#include<bits/stdc++.h>
using namespace std;
const int N=2e5+1;
inline int read(){char ch=getchar();int f=1;while(ch<'0' || ch>'9') {if(ch=='-') f=-f; ch=getchar();}
int x=0;while(ch>='0' && ch<='9') x=(x<<3)+(x<<1)+ch-'0',ch=getchar();return x*f;}
int n,m,s,t; bool vis[N];
vector<pair<int,int> > G[N];
inline int found(int x,int y) {
for(int i=0;i<G[x].size();i++)
if(G[x][i].first==y) return i;
} //表示找到 x->y 的路返回其位置
inline int dfs(int u,int flow) { //返回当前最大流 , 为 0 说明无法流
if(u==t) return flow;
vis[u]=1; for(int i=0;i<G[u].size();i++) {
int v=G[u][i].first,w=G[u][i].second;
if(!w || vis[v]) continue;
int x=dfs(v,min(flow,w)); //下一步
if(x>0) { //可以流
G[u][i].second-=x;
int y=found(v,u);
G[v][y].second+=x; //反悔一次
return x;
}
} return 0; //所有尝试没有答案则无解
}
int main(){
n=read(),m=read(),s=read(),t=read();
while(m--) {
int u=read(),v=read(),w=read();
G[u].push_back(make_pair(v,w));
G[v].push_back(make_pair(u,0)); //细节 , 便于之后操作
} int t,ans=0;
while((memset(vis,0,sizeof(vis))) && (t=dfs(s,INT_MAX))>0) ans+=t; //可以增广则增广一次
printf("%d\n",ans);
return 0;
}
算法二 \(\text{dinic}\)
上面的 \(\text{FF}\) 和 \(\text{EK}\) 算法,虽然实现不同但本质完全一样,因为常数问题,我们难以确定它们的最终效率究竟如何,因此我们需要更优的算法。
注意到在 \(\text{FF}\)(下文中用 \(\text{FF}\) 代称两种算法)每次反悔的时间不是很妙,大量操作也不是很优。
注意到一种优化,如果我们把 \(\text{FF}\) 中,\(u \rightarrow v\) 这条边当 \(v\) 遍历完毕时,那么我们直接从 \(u\) 重新尝试其它的 \(u \rightarrow v\) .
那么,这样快了许多是不错的,但是 出现绕长路,走回路 的棘手问题。
所以,我们根据 搜索树 的思路,提出了 分层图 的概念。
分层图 其实就是按照和源点的距离进行分层。用人话说,就是源点自己是 \(1\) 层,源点 \(i\) 步能 流到(流量为 \(0\) 就算了)
的是 \(i+1\) 层。
这样的分层,我们每次 只需要从 \(i\) 层往 \(i+1\) 层探索即可。
那么你会问了:如何判断当前有解呢?
如果最终汇点有层数的话,说明能流到汇点,就有解;如果流不到汇点,就是没有层数,那肯定是无解。分层既可以优化搜索效率,又可以做无解判断。好!
理论上时间复杂度:\(O(n \times m)\).(由于根本跑不满这个时间,所以仍然能通过,两个 \(\text{OJ}\) 都测过了)
实际得分:\(100pts\).
// 这是洛谷上交的 , 去 LOJ 的话要开 long long
#pragma GCC optimize(2)
#include<bits/stdc++.h>
using namespace std;
const int N=2e5+1;
inline int read(){char ch=getchar();int f=1;while(ch<'0' || ch>'9') {if(ch=='-') f=-f; ch=getchar();}
int x=0;while(ch>='0' && ch<='9') x=(x<<3)+(x<<1)+ch-'0',ch=getchar();return x*f;}
int n,m,s,t,ans=0,dep[N],q[N];
vector<pair<int,int> > G[N];
inline bool bfs() { //探索
memset(dep,0,sizeof(dep)); int l,r; //用左右指针实现队列
q[l=r=1]=s; dep[s]=1; while(l<=r) {
int u=q[l++]; for(int i=0;i<G[u].size();i++) {
int v=G[u][i].first,w=G[u][i].second;
if(!w || dep[v]) continue; //流过或者流量为 0
dep[v]=dep[u]+1,q[++r]=v; //探索
}
} return dep[t];
}
inline int found(int x,int y) {
for(int i=0;i<G[x].size();i++)
if(G[x][i].first==y) return i;
}
inline int dfs(int u,int dis) {
if(u==t) return dis;
int out=0; for(int i=0;i<G[u].size();i++) {
int v=G[u][i].first,w=G[u][i].second;
if(!w || dep[v]!=dep[u]+1) continue;
int x=dfs(v,min(dis,w));
G[u][i].second-=x; int y=found(v,u);
G[v][y].second+=x; dis-=x; out+=x;
} return dep[u]=(out==0)?0:dep[u],out;
} //基本和 FF / EK 一样
int main(){
n=read(),m=read(),s=read(),t=read();
while(m--) {
int u=read(),v=read(),w=read();
G[u].push_back(make_pair(v,w));
G[v].push_back(make_pair(u,0));
} while(bfs()) ans+=dfs(s,2e9); //这里如果交 LOJ 要把 2e9 适当开大 , 实测 2e12 可以通过
printf("%d\n",ans); //交 LOJ 要把 %d 改成 %lld
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号