transformer之我观
 初学transformer有感
初学transformer有感
transformer模型学习有感
一个 transformer 模型用自注意力层而非 Rnn 或 Cnn 来处理变长的输入。这种通用架构有一系列的优势:
- 它不对数据间的时间/空间关系做任何假设。这是处理一组对象(objects)的理想选择。
- 层输出可以并行计算,而非像 RNN 这样的一步一步的计算。
- 远距离的两个项可以影响彼此的输出,而无需经过许多 RNN 步骤或卷积层。
- 它能学习长距离的依赖关系。在Rnn和Cnn中会产生梯度消失,难以更新神经网络浅层的参数。
该架构的缺点是:
- 对于时间序列,一个单位时间的输出是从整个历史记录计算的,而非仅从输入和当前的隐含状态计算得到。这可能效率较低。
- 如果输入确实有序列的关系,比如文本,则必须加入一些位置编码,否则模型只会看到一堆单词而不是一个有序列关系的句子。
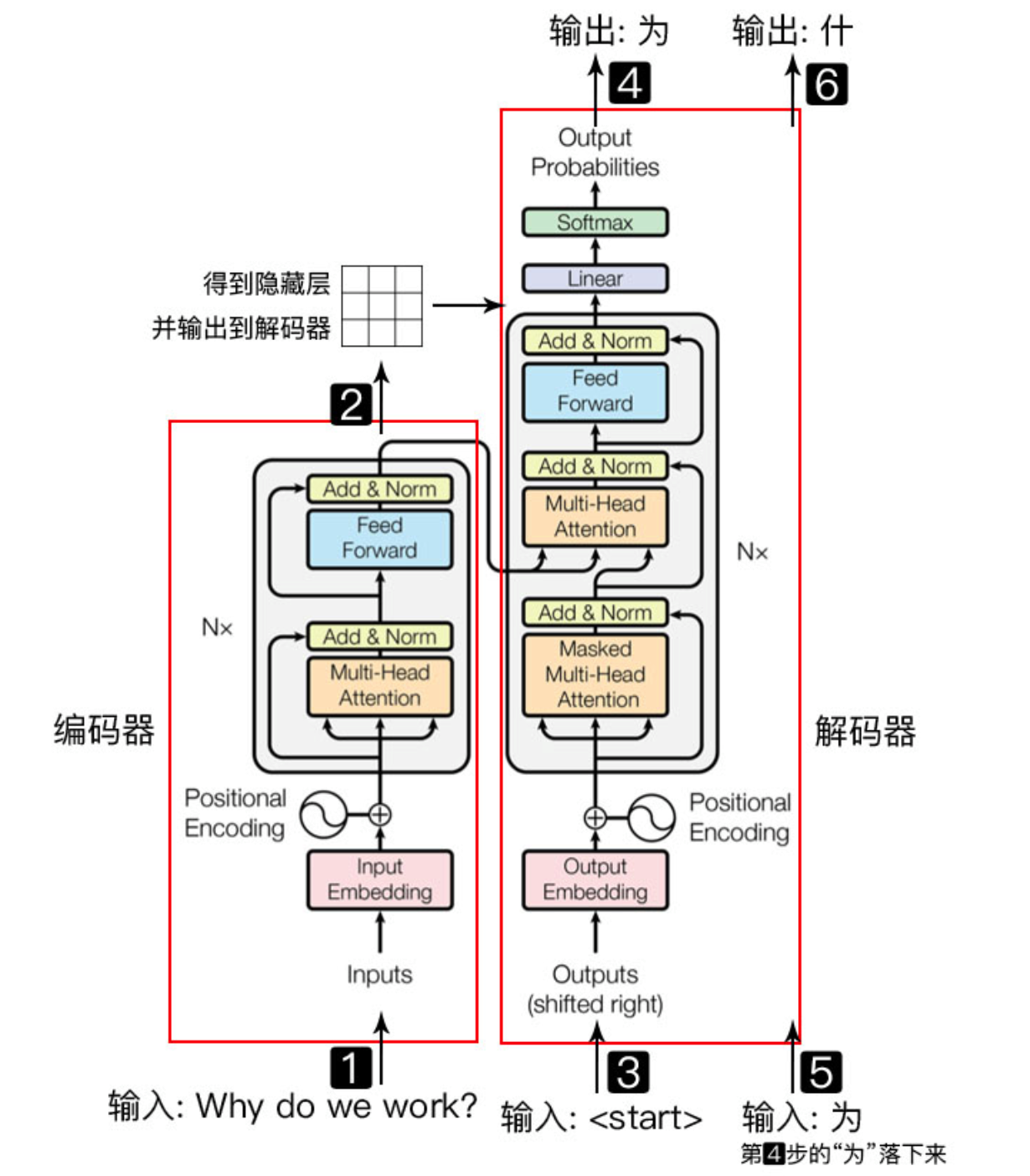
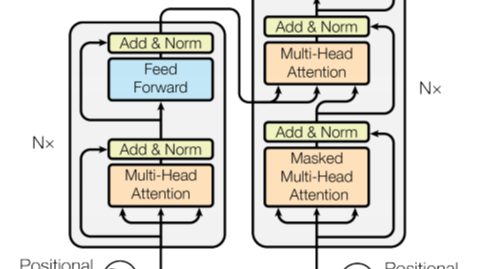
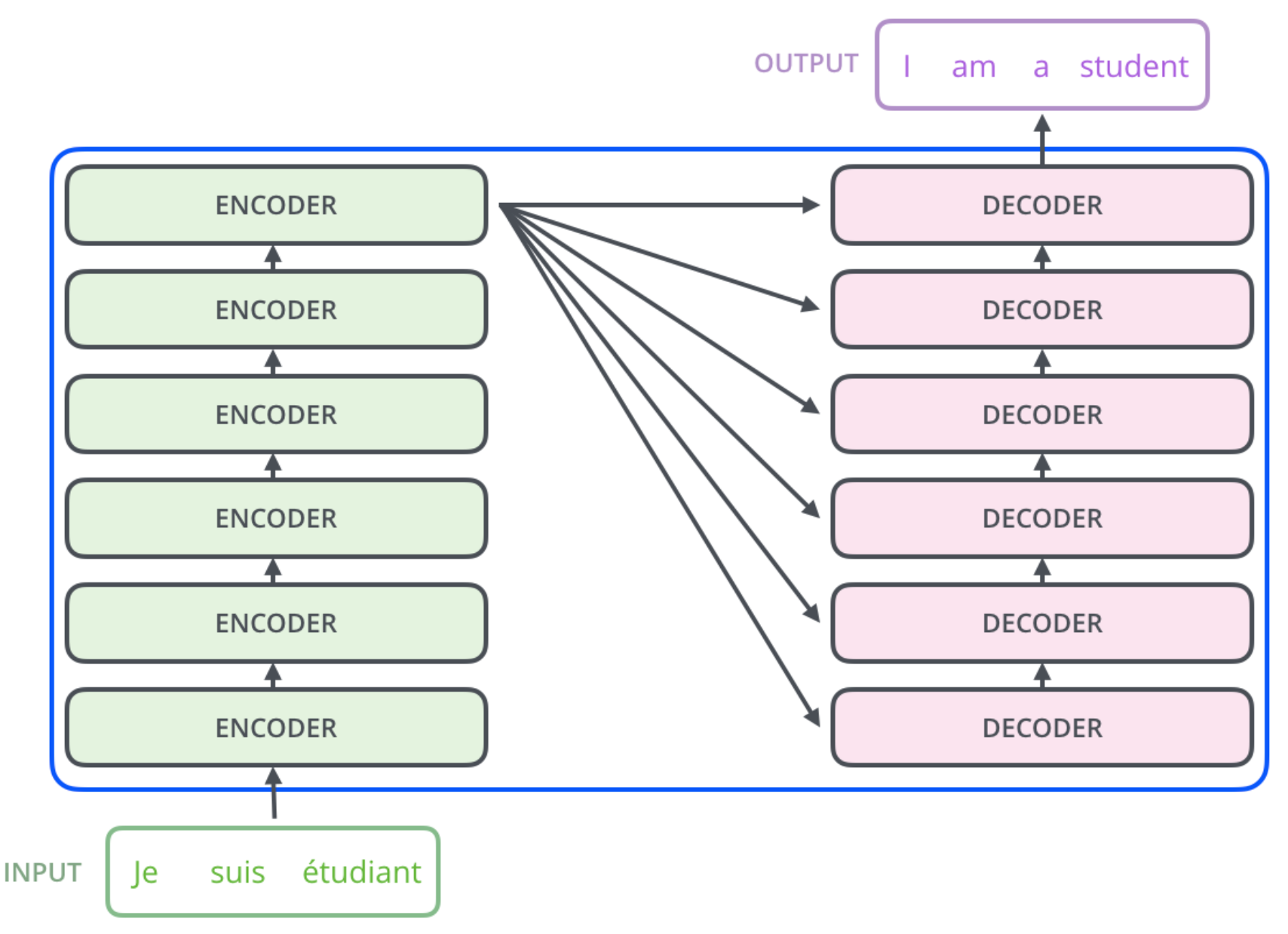
首先是transformer最经典的architecture架构图。
其中,Encoder负责将输入\((x_1, x_2, ..., x_n)\) 转换为 \((z_1,z_2,...,z_n)\) 的输出,其中 \(x_t\) 是我们原始输入的第t个词,\(z_t\) 是这个词的向量表示。在每个时刻 \(t\) Decoder拿到Encoder的输出 \((z1,...,zn)\) ,通过自回归来生成预测序列 \((y_1, y_2, ...,y_m)\),也就是将过去时刻的输出作为我第t时刻的额外输入。(即步骤3)
Encoder架构
主要分为五个部分,下面将以原论文中的顺序依次讲解。
1. Inputs Embedding
就是我们在处理文本类输入时常用的词嵌入word2vec,用来将一个字表示成一个向量。
不同于One-Hot编码的“没有任何的相对关系,只是一串01向量”;embedding可以看作是将每个单词的One-Hot编码向量乘以一个参数矩阵 \(W_0\),输出就是这个单词的词向量但是输出的embedding向量的维度一般小于One-Hot编码。
transformer将所有词向量的embedding都设置为512
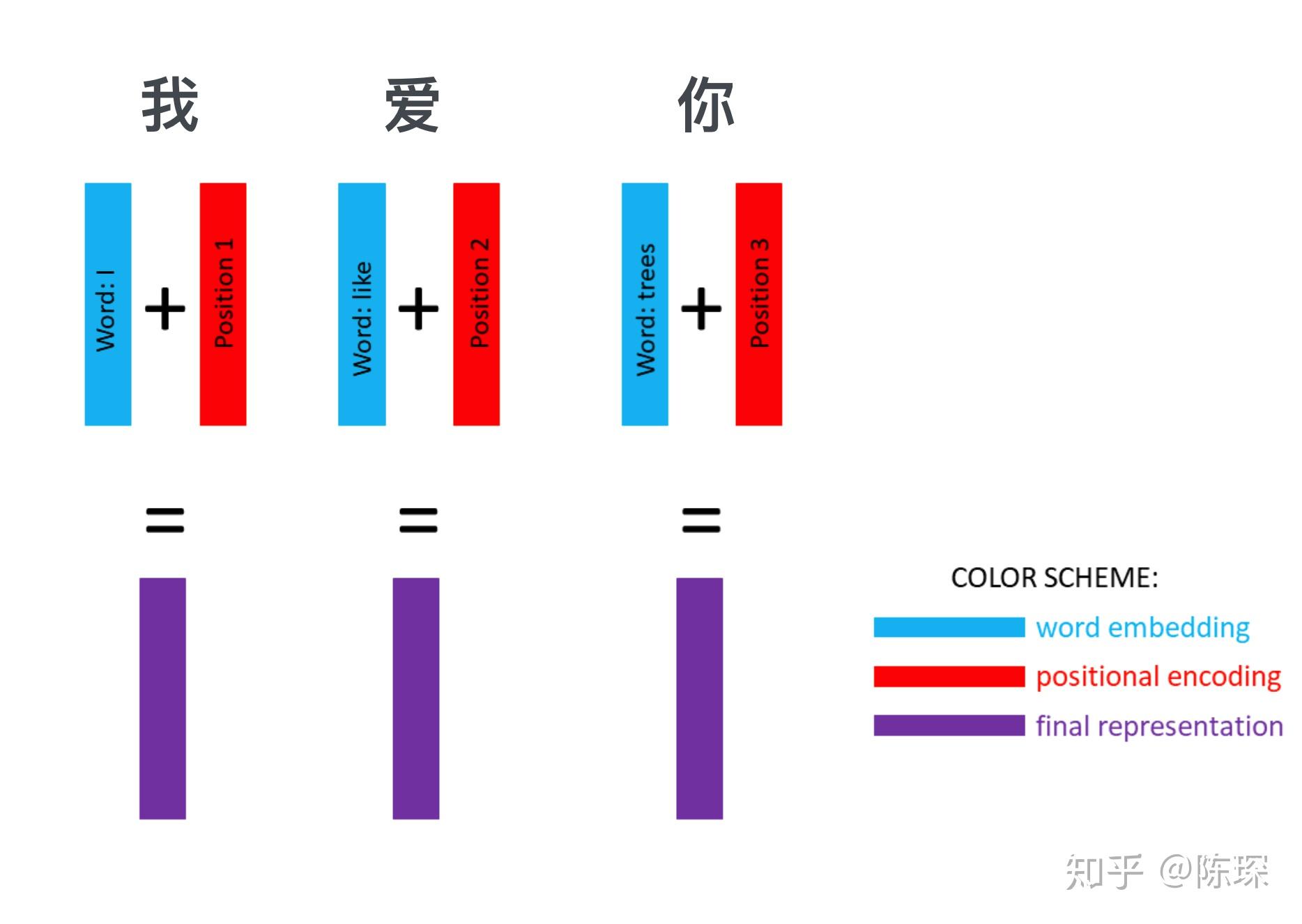
2. Positional Encoding
因为transformer中没有任何的rnn或者cnn,完全依赖于注意力机制来建立输入和输出之间的关系。但是我们的输入是一个句子,会包含序列信息。不同于RNN会按顺序处理每一个字,天然的有序列关系,transformer需要对输入添加位置编码。也就是对输入序列中的每一个字 \(x_i\) ,我们都在其中添加一个关于 \(i\) 的相对位置编码。
def positional_encoding(position, d_model):
---算角度
angle_rads = get_angles(np.arange(position)[:, np.newaxis],
np.arange(d_model)[np.newaxis, :],
d_model)
# 将 sin 应用于数组中的偶数索引(indices);2i
angle_rads[:, 0::2] = np.sin(angle_rads[:, 0::2])
# 将 cos 应用于数组中的奇数索引;2i+1
angle_rads[:, 1::2] = np.cos(angle_rads[:, 1::2])
pos_encoding = angle_rads[np.newaxis, ...]
---
return tf.cast(pos_encoding, dtype=tf.float32)#将位置信息转换为float
pos_encoding = positional_encoding(50, 512)
print (pos_encoding.shape)
>>>(1, 50, 512)
Input Tensor 的 size 为 [batch_size, seq_length, 512]:
batch_size 指的是定义的批量大小 batch_size
seq_length 指的是 sequence 的长度,(比如“我爱你”,seq_length = 3)
512 指的是 embedding 的 dimension
3.多头+自注意力机制
3.1 Scaled Dot-Product Attention
注意力函数就是通过矩阵乘法,求得query矩阵和key矩阵的向量乘法,得到注意力矩阵。经过一层softmax之后,再跟value矩阵相乘。
注意力矩阵的第i行的含义是:第i个q跟所有的k的相似度,可以理解为向量做内积。所以我们对每行做softmax之后,就会得到对于这个query向量对于所有key向量的相似度,并且相加为1。
def scaled_dot_product_attention(q, k, v, mask):
"""计算注意力权重。
q, k, v 必须具有匹配的第一个维度,也就是batch_size样本容量
k, v 必须有匹配的倒数第二个维度,也就是seq_len_k = seq_len_v,因为key矩阵和value矩阵一定有相同的
虽然 mask 根据其类型(填充或前瞻)有不同的形状,
但是 mask 必须能进行广播转换以便求和。
参数:
q: 请求的形状 == (batch_size, seq_len_q, depth)
k: 主键的形状 == (batch_size, seq_len_k, depth)
v: 数值的形状 == (batch_size, seq_len_v, depth_v)
mask: Float 张量,其形状能转换成
(..., seq_len_q, seq_len_k)。默认为None。
返回值:
输出,注意力权重
"""
matmul_qk = tf.matmul(q, k, transpose_b=True) # (..., seq_len_q, seq_len_k)
# 缩放 matmul_qk
dk = tf.cast(tf.shape(k)[-1], tf.float32)
scaled_attention_logits = matmul_qk / tf.math.sqrt(dk)
# 将 mask 加入到缩放的张量上。
if mask is not None:
scaled_attention_logits += (mask * -1e9)
# softmax 在最后一个轴(seq_len_k)上归一化,因此分数(对注意力矩阵每一行归一化,则每个字的注意力向量一行,就是与其余字的相关程度)相加等于1。
attention_weights = tf.nn.softmax(scaled_attention_logits, axis=-1) # (..., seq_len_q, seq_len_k) 注意力矩阵
output = tf.matmul(attention_weights, v) # (..., seq_len_q, depth_v) 再把注意力矩阵乘V
return output, attention_weights
3.2 多头注意力
![]()
对于多头注意力机制,也就是我们与其做一次注意力机制,不如我们把 q,k,v 投影到一个低维的空间,其中每个头的输入维度中,embedding减少到之前的 \(1 / h\) ,再分别做h次注意力机制。将得到的h个结果并起来,并重新将结果映射回高维,就得到我们需要的注意力输出了。
可以类比CNN中的多卷积核的作用——每次抽取不同特征,得到多个不同的特征通道。
class MultiHeadAttention(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads):
super(MultiHeadAttention, self).__init__()
self.num_heads = num_heads
self.d_model = d_model
assert d_model % self.num_heads == 0
self.depth = d_model // self.num_heads
self.wq = tf.keras.layers.Dense(d_model)
self.wk = tf.keras.layers.Dense(d_model)
self.wv = tf.keras.layers.Dense(d_model)
self.dense = tf.keras.layers.Dense(d_model)
def split_heads(self, x, batch_size):
"""
分拆最后一个维度到 (num_heads, depth).
转置结果使得形状为 (batch_size, num_heads, seq_len, depth)
"""
x = tf.reshape(x, (batch_size, -1, self.num_heads, self.depth))
return tf.transpose(x, perm=[0, 2, 1, 3])
def call(self, v, k, q, mask):
batch_size = tf.shape(q)[0]
q = self.wq(q) # (batch_size, seq_len, d_model)
k = self.wk(k) # (batch_size, seq_len, d_model)
v = self.wv(v) # (batch_size, seq_len, d_model)
q = self.split_heads(q, batch_size) # (batch_size, num_heads, seq_len_q, depth)
k = self.split_heads(k, batch_size) # (batch_size, num_heads, seq_len_k, depth)
v = self.split_heads(v, batch_size) # (batch_size, num_heads, seq_len_v, depth)
# scaled_attention.shape == (batch_size, num_heads, seq_len_q, depth)
# attention_weights.shape == (batch_size, num_heads, seq_len_q, seq_len_k)
scaled_attention, attention_weights = scaled_dot_product_attention(
q, k, v, mask)
scaled_attention = tf.transpose(scaled_attention, perm=[0, 2, 1, 3]) # (batch_size, seq_len_q, num_heads, depth)
concat_attention = tf.reshape(scaled_attention,
(batch_size, -1, self.d_model)) # (batch_size, seq_len_q, d_model)
output = self.dense(concat_attention) # (batch_size, seq_len_q, d_model)
return output, attention_weights
4.残差连接和layernorm
4.1残差连接
在经过多头注意力处理后,我们的输出 \(Attention(Q,K,V)\) 的维度就是 \((batch\_size,seq\_len, d\_model)\) ,跟我们的原始属于 \(x\) 维度完全相等。因此我们这里可以直接使用残差连接,将他们加起来就得到 \((X + Attention(Q,K,V))\) 。
解决的问题:
-
网络退化并不是过拟合,过拟合是指~,网络退化是模型在训练数据集和测试集上面的表现都不好。
-
通常网络退化是由神经网络层数过多引起的(会造成梯度爆炸、消失;过拟合等问题)
-
解决方法:
resnet中提出的残差连接的概念,首先我们知道,我们在训练网络时,网络层数越高理论上效果至少不会比层数较低时表现得更差(因为最后面的几层神经网络可以全都是identity mapping)。但事实上网络层数过深就会造成网络退化。为了解决这个问题,resnet中显式的构造出了一个identity mapping—让每层神经网络学习\(f(x):= H(x) - x\),相当于在反向传播求导的时候加了一个恒等项。(其中X是上一层神经网络的输出,H(x)是这一层要学习的函数)最后该层神经网络的输出等价于上一层神经网络的输出x和这一层神经网络学习残差的输出之和。
4.2 layernorm
作用:跟batchnorm一样,加速模型收敛
-
不同的是LN是操作一个样本的所有特征,让各个特征的分布变为均值为0,方差为1。并且引入可训练系数 \(\alpha, \beta\) ,弥补归一化过程中损失的信息。
-
BN是对一个batch_size内的所有所有样本的同一特征进行归一化操作。
class EncoderLayer(tf.keras.layers.Layer):
def __init__(self, d_model, num_heads, dff, rate=0.1):
super(EncoderLayer, self).__init__()
self.mha = MultiHeadAttention(d_model, num_heads)
self.ffn = point_wise_feed_forward_network(d_model, dff) # 前向传播
self.layernorm1 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.layernorm2 = tf.keras.layers.LayerNormalization(epsilon=1e-6)
self.dropout1 = tf.keras.layers.Dropout(rate)
self.dropout2 = tf.keras.layers.Dropout(rate)
def call(self, x, training, mask):
attn_output, _ = self.mha(x, x, x, mask) # (batch_size, input_seq_len, d_model) 三个x代表上一层的输出,N个encoder是串联的
attn_output = self.dropout1(attn_output, training=training)
out1 = self.layernorm1(x + attn_output) # (batch_size, input_seq_len, d_model) 残差连接
ffn_output = self.ffn(out1) # (batch_size, input_seq_len, d_model)
ffn_output = self.dropout2(ffn_output, training=training)
out2 = self.layernorm2(out1 + ffn_output) # (batch_size, input_seq_len, d_model)
return out2
5.FFN
就是一个两层的MLP模型。
相当于将多头注意力之后的输出 \(Attention(Q,K,V)\) 做一个非线性变换。因为我们之前的操作包括attention机制都是线性的,这里引入非线性因素,使模型更好收敛。
#@save
class PositionWiseFFN(tf.keras.layers.Layer):
"""基于位置的前馈网络"""
def __init__(self, ffn_num_hiddens, ffn_num_outputs, **kwargs):
super().__init__(*kwargs)
self.dense1 = tf.keras.layers.Dense(ffn_num_hiddens)
self.relu = tf.keras.layers.ReLU()
self.dense2 = tf.keras.layers.Dense(ffn_num_outputs)
def call(self, X):
return self.dense2(self.relu(self.dense1(X)))
Decoder架构
针对于Encoder的不同来阐述:
1. Decoder的mask多注意力机制
这是因为不同于encoder的多头注意力机制用来抓取全局序列的信息,我Decoder是要用来预测下一个输出的,因此也就无法看到 \(t\) 时刻以及之后的语句序列。
2. Decoder中间的多头注意力
- 这里不再是自注意力机制,而是将encoder的输出拿过来作为 \(Key-Value\) 矩阵,与自己的第一层注意力输出矩阵做注意力运算。通过这种方式有效的提取encoder的输出。
与RNN的异同
- 从输入的处理来看:RNN的输入序列中每个字都天然的按时间排序。transformer中则是用positional encoding给每个字附加上了位置信息。
- 从使用序列上一时刻的信息来看:RNN将上一时刻的隐藏状态作为下一时刻的输入,从而传递了之前时刻的信息。transformer是拿到整个句子的注意力输出,然后通过MLP找到我们想要的东西。
- 附上邱锡鹏老师书中的插图:几种不同的序列到序列模型

