身处机器人行业,不想一直只做低端的单片机控制,老是待在舒适区,所以一直都想学一下ROS系统,但看了几个月资料后,感觉还是云里雾里,似懂非懂,感念似乎都很清楚,但要实际去做,却又感觉无从下手。
当然之前看的资料也没白看,系统安装、基本概念、基本操作都得心里有底,因为Linux基础并不是很好,所以还是比较畏惧敲命令的方式的,不管在Linux系统上做什么,我都还是很乐意去找相应IDE,ROS也不例外,官网上教程全是命令行,痛苦了一阵子之后,实在觉得没必要回到原始人状态,写代码就不用说了,光是那一堆依赖都能让人崩溃,于是网上一顿搜,发现ROS开发也是有IDE的,那个欣喜之情啊,简直溢于言表;马上下载安装上了,用了一段时间,发现这工具有很多bug,有时候莫名其妙的错误,但无妨,至少不用再自己去手动添加依赖了,我心足以!
#include <ros/ros.h>
#include <serial/serial.h> //ROS已经内置了的串口包
#include <std_msgs/String.h>
#include <std_msgs/Empty.h>
#include <stm32f407/tdata.h>
#include "std_msgs/UInt8.h"
#include "std_msgs/UInt8MultiArray.h"
serial::Serial ser; //声明串口对象
//回调函数
void datasend_callback(const stm32f407::tdata::ConstPtr &frm)
{
int len = frm->data.size();
printf("Send:%02d 0x", len);
for (int i = 0; i < len; i++)
{
// printf("%02X ", frm->data[i]);
printf("%02X ", frm->data.at(i));
}
printf("\r\n");
ser.write(frm->data); //发送串口数据
}
int main (int argc, char** argv)
{
//初始化节点
ros::init(argc, argv, "serial_readwrite_node");
//声明节点句柄
ros::NodeHandle nh;
static int len;
stm32f407::tdata RecvData;
//订阅主题,并配置回调函数
ros::Subscriber send_sub = nh.subscribe("datasend", 1000, datasend_callback);
//发布主题
ros::Publisher read_pub = nh.advertise<stm32f407::tdata>("datarecv", 1000);
try
{
//设置串口属性,并打开串口
ser.setPort("/dev/ttyUSB1");
ser.setBaudrate(115200);
serial::Timeout to = serial::Timeout::simpleTimeout(1000);
ser.setTimeout(to);
ser.open();
}
catch (serial::IOException& e)
{
ROS_ERROR_STREAM("Unable to open port ");
return -1;
}
//检测串口是否已经打开,并给出提示信息
if(ser.isOpen())
{
ROS_INFO_STREAM("Serial Port initialized");
}
else
{
return -1;
}
//指定循环的频率
ros::Rate loop_rate(10);
while(ros::ok())
{
len = ser.available();
if(len>0)
{
std_msgs::UInt8MultiArray serial_data;
// len = ser.available();
ser.read(serial_data.data,len) ;
printf("Recv:%02d 0x", len);
RecvData.data.clear();//清除上一次的数据
for (size_t i = 0; i < len; i++)
{
// ROS_INFO("%02X", serial_data.data[i]);
printf("%02X ", serial_data.data[i]);
RecvData.data.push_back(serial_data.data[i]);
}
printf("\r\n");
read_pub.publish(RecvData);
}
//处理ROS的信息,比如订阅消息,并调用回调函数
ros::spinOnce();
loop_rate.sleep();
}
}
其中操作非常简单,定义了一个订阅句柄,用来接收其他节点发布的数据,然后在回调当中,用串口直接发送出去,另外定义一个发布句柄,在主循环不断扫描串口,读取数据,
如果有读到数据,则发布出去,其他节点订阅后既可查看单片机上发的数据;
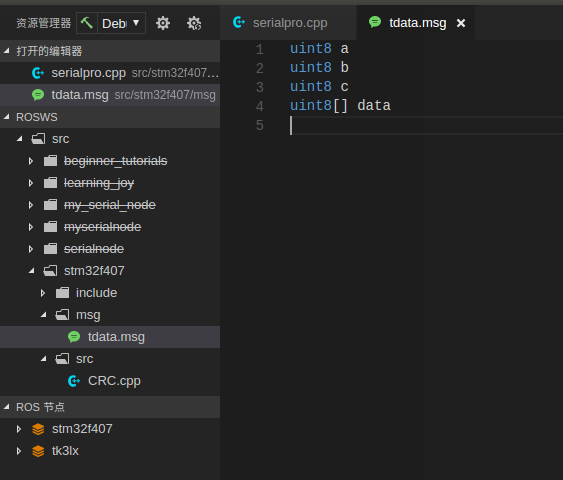
其中无论订阅还是发布都使用到了一个自定义消息,用来规定要传输数据的格式,添加Msg文件夹后,再添加msg文件,内容如下:
![]()
这便是两个话题对应消息格式;
上面这个节点主要用作直接对硬件串口进行收发,它只管收发,并不理会收发的数据是什么,具体流程为,如果接收其他节点发布的消息,则将之原样发送到串口,如何
扫描到串口有数据,则将读到的数据发布到话题上;
所以如果我们要发特定数据并对接收到的做数据处理,则需添加另外一个节点,名称定为datapro,内容如下:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
#include <stm32f407/tdata.h>
#include "CRC.h"
//回调函数
void datarecv_callback(const stm32f407::tdata::ConstPtr &frm)
{
int len = frm->data.size();
// std::cout << "frm->data.size=" << cnt << std::endl;
// ROS_INFO_STREAM("Writing to serial port" << msg->data);
// ROS_INFO_STREAM("Send: " << frm->data);
// printf("Recv:%ld 0x", cnt);
printf("Recv:%02d 0x", len);
for (int i = 0; i < len; i++)
{
// printf("%02X ", frm->data[i]);
printf("%02X ", frm->data.at(i));
}
printf("\r\n");
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "datapro");
ros::NodeHandle nh;
//订阅主题,并配置回调函数
ros::Subscriber recv_sub = nh.subscribe("datarecv", 1000, datarecv_callback);
ros::Publisher send_pub = nh.advertise<stm32f407::tdata>("datasend", 1000);
ros::Rate loop_rate(1);//10hz
int len=0;
stm32f407::tdata SendData;
CRC cc_crc;
//复位 A6 B7 01 02 04 00 B7 1B 02 A6 B7 01 02 04 05 B7 E4 F7
uint8_t Buffer[9] ={0xA6, 0xB7, 0x01, 0x02, 0x04, 0x05, 0xB7, 0xE4, 0xF7};
uint16_t CrcSum=0;
CrcSum = cc_crc.CRC16_ccitt(Buffer,0,7);
// printf("0x%04X\r\n",CrcSum);
Buffer[7] = (uint8_t)(CrcSum>>8);
Buffer[8] = (uint8_t)CrcSum;
SendData.data.clear();
for (size_t i = 0; i < 9; i++)
{
SendData.data.push_back(Buffer[i]);
}
// SendData.data.push_back(0xA6);
// SendData.data.push_back(0xB7);
// SendData.data.push_back(0x01);
// SendData.data.push_back(0x02);
// SendData.data.push_back(0x04);
// SendData.data.push_back(0x05);
// SendData.data.push_back(0xB7);
// SendData.data.push_back(0xE4);
// SendData.data.push_back(0xF7);
// frame_pub.publish(SendData);
while (ros::ok())
{
len = SendData.data.size();
printf("Send:%02d 0x", len);
for (int i = 0; i < len; i++)
{
// printf("%02X ", SendData.data[i]);
printf("%02X ", SendData.data.at(i));
}
printf("\r\n");
send_pub.publish(SendData);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
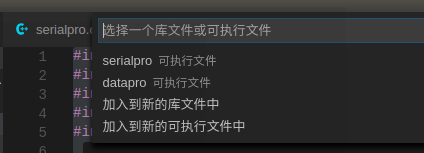
该节点的作用就是发布特定格式的数据到发送话题上,以及接收上一个节点发布的话题消息;逻辑很简单,其中需要注意的是在添加CRC校验时,添加:C++类,输入类名称后
会有几个选项,如下:
之前一直没搞懂他们的区别,都是选的“加入到新的可执行文件中”,如何选这一项,则改类的代码会单独形成一个可执行文件,在运行时需要单独开启,所以如果两个
功能相对独立,则可以选一项,但是如果代码是调用关系,比如上面的CRC类实际上是被datapro调用的,所以这里我们选择第二项会更好,运行时我们只需要驱动datapro就
可以使用CRC类功能;
另外Studio工具有一个bug是,添加C++类时,会报错,提示找不到头文件,这问题折腾了很久,后来发现需要把自动生成的头文件,提到上一级目标才可编译通过,即将
头文件直接到include文件夹下。
另一个小提醒就是,每次添加新文件或新类时,最好点一下刷新按钮,有时候看不到添加的类文件,需要手动刷新一下才会出来;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号