



深度学习二
转载:http://blog.csdn.net/zouxy09/article/details/8775488
目录:
六、浅层学习(Shallow Learning)和深度学习(Deep Learning)
七、Deep learning与Neural Network
9.3、Restricted Boltzmann Machine(RBM)限制波尔兹曼机
9.5、Convolutional Neural Networks卷积神经网络
接上
因为我们要学习的是特征的表达,那么关于特征,或者说关于这个层级特征,我们需要了解地更深入点。所以在说Deep Learning之前,我们有必要再啰嗦下特征(呵呵,实际上是看到那么好的对特征的解释,不放在这里有点可惜,所以就塞到这了)。
四、关于特征
特征是机器学习系统的原材料,对最终模型的影响是毋庸置疑的。如果数据被很好的表达成了特征,通常线性模型就能达到满意的精度。那对于特征,我们需要考虑什么呢?
4.1、特征表示的粒度
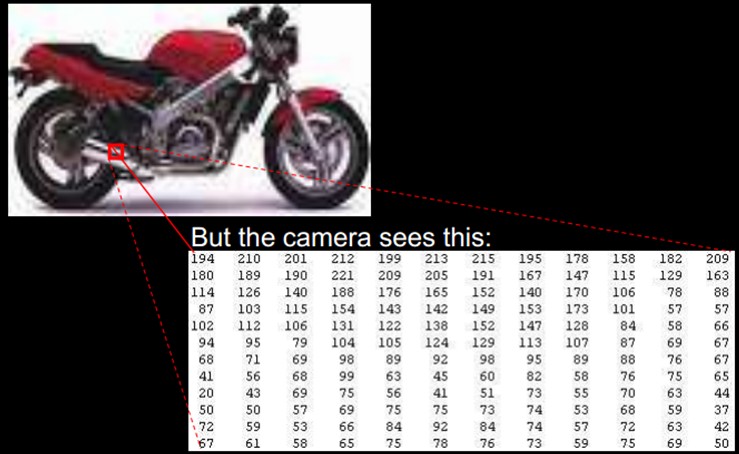
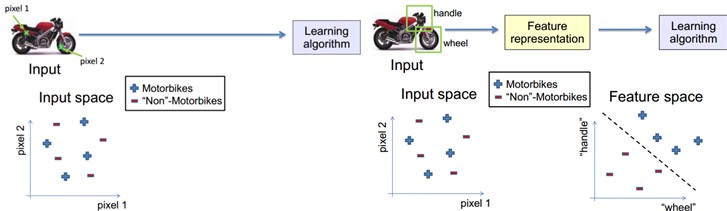
学习算法在一个什么粒度上的特征表示,才有能发挥作用?就一个图片来说,像素级的特征根本没有价值。例如下面的摩托车,从像素级别,根本得不到任何信息,其无法进行摩托车和非摩托车的区分。而如果特征是一个具有结构性(或者说有含义)的时候,比如是否具有车把手(handle),是否具有车轮(wheel),就很容易把摩托车和非摩托车区分,学习算法才能发挥作用。
4.2、初级(浅层)特征表示
既然像素级的特征表示方法没有作用,那怎样的表示才有用呢?
1995 年前后,Bruno Olshausen和 David Field 两位学者任职 Cornell University,他们试图同时用生理学和计算机的手段,双管齐下,研究视觉问题。
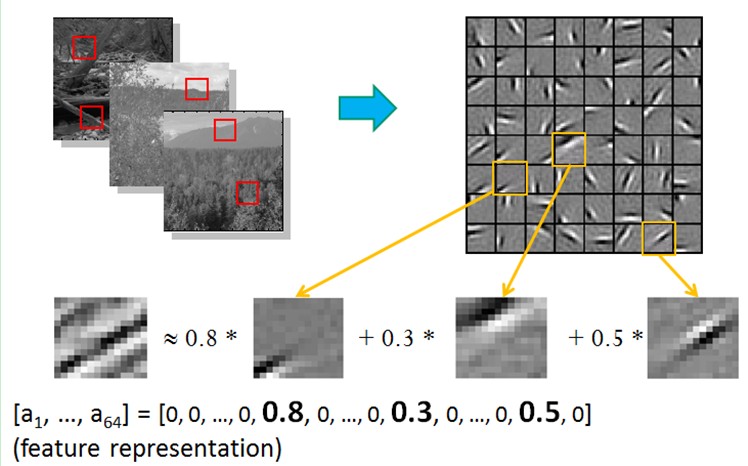
他们收集了很多黑白风景照片,从这些照片中,提取出400个小碎片,每个照片碎片的尺寸均为 16x16 像素,不妨把这400个碎片标记为 S[i], i = 0,.. 399。接下来,再从这些黑白风景照片中,随机提取另一个碎片,尺寸也是 16x16 像素,不妨把这个碎片标记为 T。
他们提出的问题是,如何从这400个碎片中,选取一组碎片,S[k], 通过叠加的办法,合成出一个新的碎片,而这个新的碎片,应当与随机选择的目标碎片 T,尽可能相似,同时,S[k] 的数量尽可能少。用数学的语言来描述,就是:
Sum_k (a[k] * S[k]) --> T, 其中 a[k] 是在叠加碎片 S[k] 时的权重系数。
为解决这个问题,Bruno Olshausen和 David Field 发明了一个算法,稀疏编码(Sparse Coding)。
稀疏编码是一个重复迭代的过程,每次迭代分两步:
1)选择一组 S[k],然后调整 a[k],使得Sum_k (a[k] * S[k]) 最接近 T。
2)固定住 a[k],在 400 个碎片中,选择其它更合适的碎片S’[k],替代原先的 S[k],使得Sum_k (a[k] * S’[k]) 最接近 T。
经过几次迭代后,最佳的 S[k] 组合,被遴选出来了。令人惊奇的是,被选中的 S[k],基本上都是照片上不同物体的边缘线,这些线段形状相似,区别在于方向。
Bruno Olshausen和 David Field 的算法结果,与 David Hubel 和Torsten Wiesel 的生理发现,不谋而合!
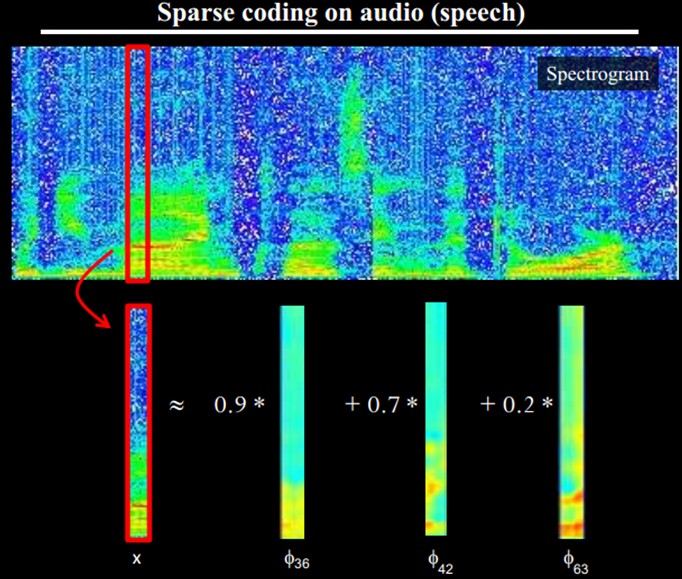
也就是说,复杂图形,往往由一些基本结构组成。比如下图:一个图可以通过用64种正交的edges(可以理解成正交的基本结构)来线性表示。比如样例的x可以用1-64个edges中的三个按照0.8,0.3,0.5的权重调和而成。而其他基本edge没有贡献,因此均为0 。
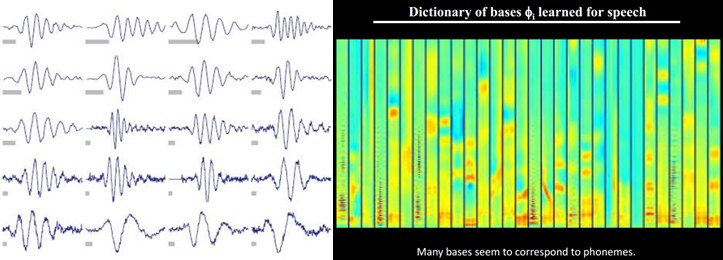
另外,大牛们还发现,不仅图像存在这个规律,声音也存在。他们从未标注的声音中发现了20种基本的声音结构,其余的声音可以由这20种基本结构合成。
4.3、结构性特征表示
小块的图形可以由基本edge构成,更结构化,更复杂的,具有概念性的图形如何表示呢?这就需要更高层次的特征表示,比如V2,V4。因此V1看像素级是像素级。V2看V1是像素级,这个是层次递进的,高层表达由底层表达的组合而成。专业点说就是基basis。V1取提出的basis是边缘,然后V2层是V1层这些basis的组合,这时候V2区得到的又是高一层的basis。即上一层的basis组合的结果,上上层又是上一层的组合basis……(所以有大牛说Deep learning就是“搞基”,因为难听,所以美其名曰Deep learning或者Unsupervised Feature Learning)
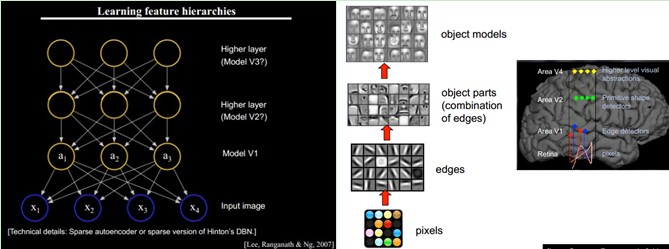
直观上说,就是找到make sense的小patch再将其进行combine,就得到了上一层的feature,递归地向上learning feature。
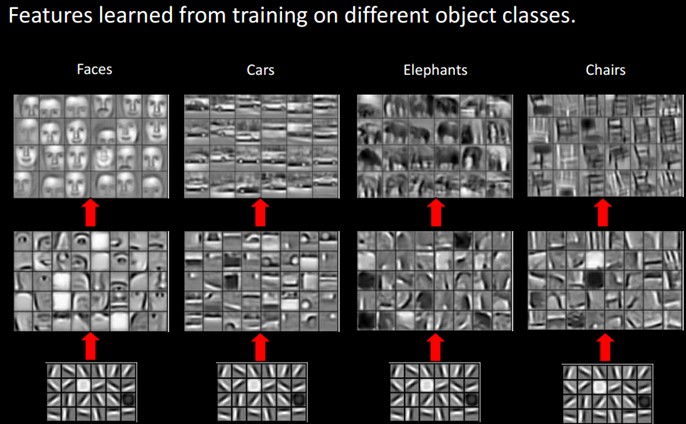
在不同object上做training是,所得的edge basis 是非常相似的,但object parts和models 就会completely different了(那咱们分辨car或者face是不是容易多了):
从文本来说,一个doc表示什么意思?我们描述一件事情,用什么来表示比较合适?用一个一个字嘛,我看不是,字就是像素级别了,起码应该是term,换句话说每个doc都由term构成,但这样表示概念的能力就够了嘛,可能也不够,需要再上一步,达到topic级,有了topic,再到doc就合理。但每个层次的数量差距很大,比如doc表示的概念->topic(千-万量级)->term(10万量级)->word(百万量级)。
一个人在看一个doc的时候,眼睛看到的是word,由这些word在大脑里自动切词形成term,在按照概念组织的方式,先验的学习,得到topic,然后再进行高层次的learning。
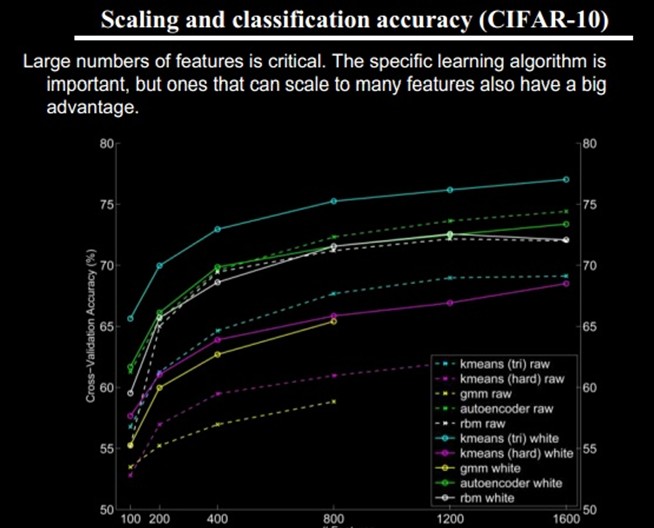
4.4、需要有多少个特征?
我们知道需要层次的特征构建,由浅入深,但每一层该有多少个特征呢?
任何一种方法,特征越多,给出的参考信息就越多,准确性会得到提升。但特征多意味着计算复杂,探索的空间大,可以用来训练的数据在每个特征上就会稀疏,都会带来各种问题,并不一定特征越多越好。
好了,到了这一步,终于可以聊到Deep learning了。上面我们聊到为什么会有Deep learning(让机器自动学习良好的特征,而免去人工选取过程。还有参考人的分层视觉处理系统),我们得到一个结论就是Deep learning需要多层来获得更抽象的特征表达。那么多少层才合适呢?用什么架构来建模呢?怎么进行非监督训练呢?
下续

