Robot Framework原生库的编辑与应用
RF有一些操作指令不存在,需要自己添加方法,比如selenium里有click_and_hold指令(鼠标保持点击状态)而RF内没有。所以需要在库文件里加入这个方法
C:\Python27\Lib\site-packages\SeleniumLibrary\keywords 目录下找到”element.py”文件

ps,为了保证原文件完整性,这里需要把原文件备份
打开文件后加入下段内容
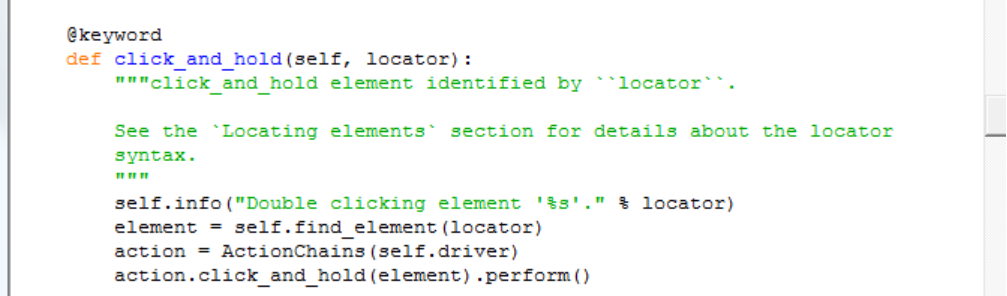
@keyword
def click_and_hold(self, locator):
"""click_and_hold element identified by ``locator``.
See the `Locating elements` section for details about the locator
syntax.
"""
self.info("Double clicking element '%s'." % locator)
element = self.find_element(locator)
action = ActionChains(self.driver)
action.click_and_hold(element).perform()
RF内即可直接应用了

关于新增方法的写法可参考下面三篇文章
https://blog.csdn.net/huilan_same/article/details/52305176
https://www.cnblogs.com/51kata/p/5126227.html
https://blog.csdn.net/huilan_same/article/details/52305176

 浙公网安备 33010602011771号
浙公网安备 33010602011771号