CRI设计与工作原理
01-CRI
0.1. CRI
在完成调度之后,kubernetes就需要负责将这个调度完成的Pod,在宿主机上创建出来,并把它所定义的各个容器启动起来。这是kubelet这个核心组件的主要功能。
与kubelet以及容器运行时管理相关的内容,都属于SIG-Node的范畴。SIG-Node和kubelet是kubernetes整套体系里非常核心的一部分,它们才是kubernetes容器编排与管理系统跟容器打交道的主要场所。
在kubernetes中有两个不可被替代的组件:
- kube-apiserver
- kubelet
不建议对kubelet的代码进行大量的改动,保持kubelet跟上游基本一致的重要性,就跟保持kube-apiserver跟上游一致是一个道理。
kubelet也是按照控制器模式工作的,工作原理如下图所示:
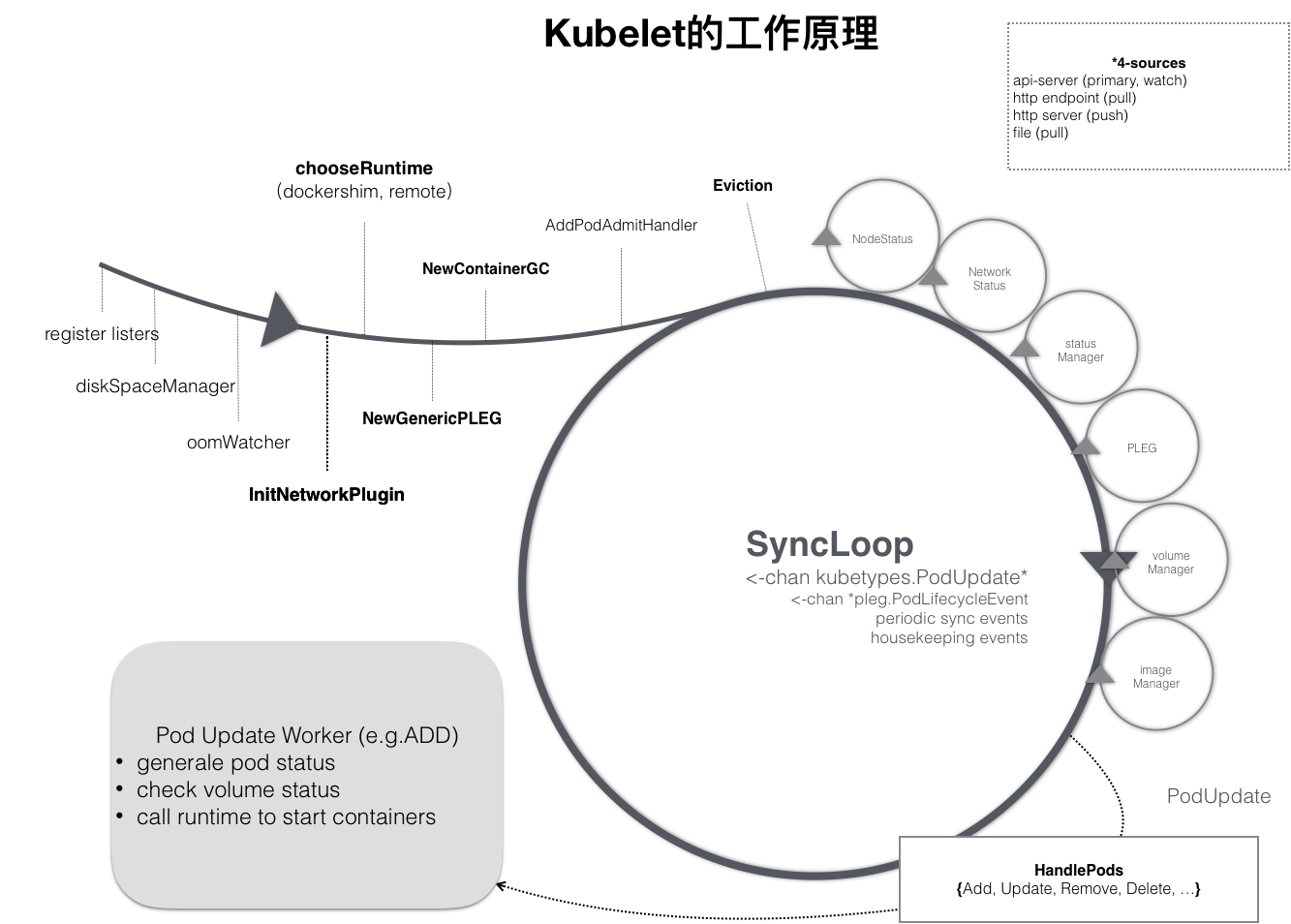
kubelet的工作核心,就是一个控制循环(即SyncLoop大圈),驱动这个控制循环运行的事件包括:
- Pod更新事件
- Pod生命周期变化
- kubelet本身设置的执行周期
- 定时的清理事件
与其他控制器类似,kubelet启动的时候:
- 做的第一件事情,就是设置Listers,注册它所关心的各种事件的Informer,这些Informer就是SyncLoop需要处理的数据的来源。
- kubelet负责维护很多其他的子控制循环(小圈),这些小的控制循序的责任就是通过控制器模式,完成kubelet的某项具体职责,如:
- Volume Manager
- Image Manager
- Node Status Manager:负责响应Node的状态变化,然后将Node的状态收集起来,并通过Heartbeat的方式上报给APIServer
- CPU Manager:负责维护Node的CPU核的信息,以便在Pod通过cpuset的方式请求CPU核的时候,能够正确地管理CPU核的使用量和可用量
kubelet通过WATCH机制(WATCH的过滤条件是该Pod的nodeName字段与自己是否相同)监听与自己相关的Pod对象的变化:
- kubelet会把这些Pod的信息缓存在自己的内存里
- 当Pod完成调度与Node绑定后,Pod的变化会触发kubelet在控制循环里注册的Handler(即图中HandlePods部分)
- 通过检查Pod在kubelet内存里的状态,kubelet能够判断出这是一个新调度过来的Pod,从而触发Handler里ADD事件对应的处理逻辑
具体的处理过程中,kubelet会启动一个叫Pod Updata Worker的单独的Goroutine来完成Pod的处理工作。
如果是ADD事件:
- kubelet为这个新的Pod生成对应的Pod Status
- 检查Pod所声明使用的Volume是否准备好
- 调用下层的容器运行时(如Docker),开始创建这个Pod所定义的容器
如果是Update事件:
- kubelet会根据Pod对象具体的变更情况,调用下层容器运行时进行容器的重建工作
注意,kubelet调用下层容器运行时的执行过程,并不会直接调动Docker的API,而是通过一组叫作CRI的gRPC接口来间接执行。之所以要在kubelet中引入这样一层单独的抽象,是为了对kubernetes屏蔽下层容器运行时的差异。在v1.6之前的版本,都是直接调用Docker的API来创建和管理容器的。
把kubelet对容器的操作,统一地抽象成一个接口(即CRI),这样kubelet就只需要跟这个接口打交道,具体的容器项目,Docker、rkt、runV(基于虚拟化技术的强隔离容器),只需要自己提供该接口的实现,然后对kubelet暴露出gRPC服务即可。
增加了CRI之后,kubernetes以及kubelet本身的架构,如下图所示:

kubernetes通过编排能力创建了一个Pod之后,调度器会为这个Pod选择一个具体的节点来运行:
- kubelet通过SyncLoop来判断需要执行的具体操作,如创建一个Pod,那么kubelet调用GenericRuntime的通用组件来发起创建Pod 的CRI请求。
- 如果使用的是Docker项目,负责响应这个请求的是dockershim组件,它把CRI请求里的内容拿出来,组装成Dcoker API请求发送给Docker Daemon
目前dockershim是kubelet代码的一部分,将来会被移出来,更普遍的场景是,需要在每台宿主机上单独安装一个负责响应CRI的组件(CRI shim),它扮演的是kubelet和容器项目之间的垫片,它的作用是实现CRI规定的每个接口,然后把具体的CRI请求翻译成对后端容器项目的请求或操作。
kubelet将kubernetes对应用的定义,一步步转换成最终对Docker或者其他容器项目的API请求的过程中,kubelet的SyncLoop和CRI的设计是最重要的关键点。
基于以上设计,SyncLoop本身就要求这个控制循环是绝对不可以被阻塞的,所以凡是在kubelet里有可能会消耗大量时间的操作,如准备Pod 的Volume,拉取镜像等,SyncLoop都会开启单独的Goroutine来进行操作。
0.2. CRI设计与工作原理
CRI机制能够发挥作用的核心,就在于每一种容器项目现在都可以自己实现一个CRI shim,自行对CRI请求进行处理。这样,kubernetes就有了一个统一的容器抽象层,使得下层容器运行时可以自由地对接进入kubernetes中。
CRI shim就是容器项目的维护者们自由发挥的场地,除了dockershim之外,其他容器运行时的CRI shim都需要额外部署在宿主机上。
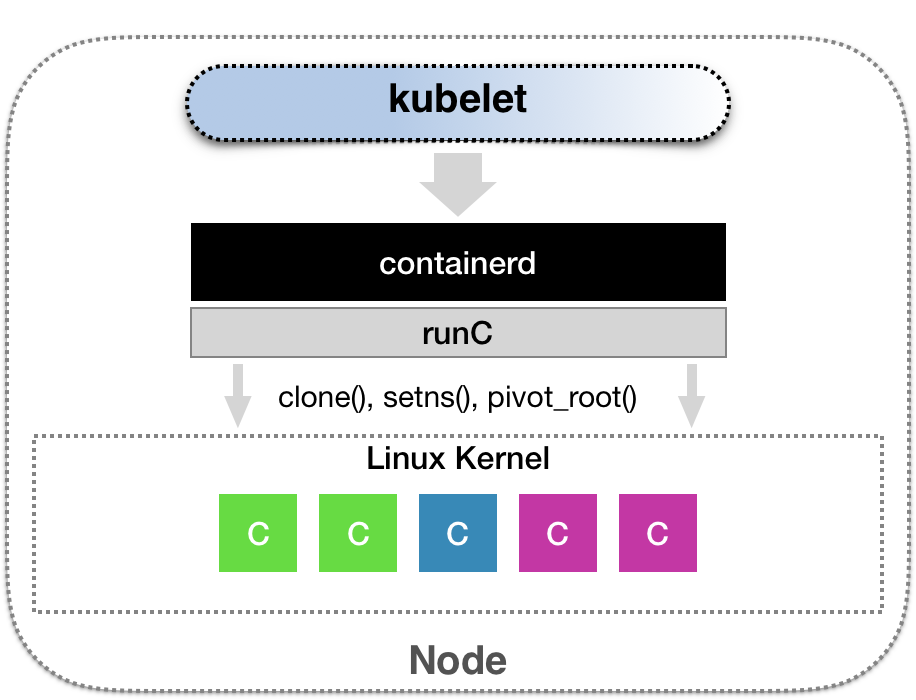
CNCF的containerd项目,可以通过一个典型的CRI shim能力,将kubernetes发出的CRI请求,转换成对containerd的调用,然后创建出runC容器。而runC项目才是负责执行设置容器Namespace、Cgroups和chroot等基础操作的组件,这几层的关系如下图所示:
CRI待实现的接口如下图所示:
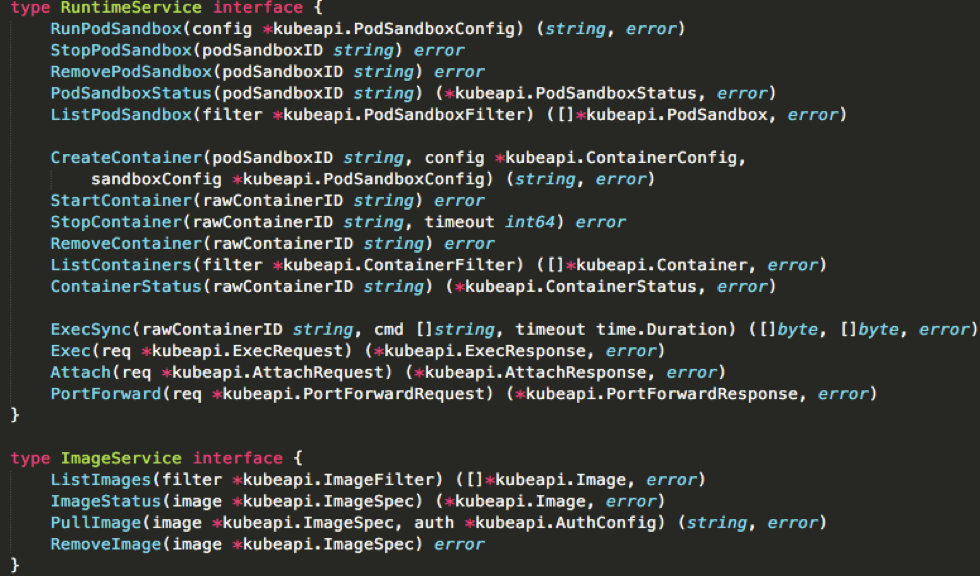
作为一个CRI shim,containerd对CRI的具体实现如下,把CRI分为两组:
- RuntimeService,它提供的接口,主要是容器相关的操作,如创建、启动和删除容器,执行exec命令等
- ImageService,它提供的接口,主要是容器镜像相关的操作,如拉取和删除镜像等
0.2.1. RuntimeService
0.2.1.1. 容器声明周期的实现
在这一部分CRI设计的一个重要原则,就是确保这个接口本身,只注容器不关注Pod,原因是:
- Pod是kubernetes的编排概念,而不是容器运行时的概念,所以不能假设所有下层容器项目,都能够暴露出可以直接映射为Pod的API。
- 如果CRI中引入了关于Pod的概念,那么接下来只要Pod API对象的字段发生编号,那么CRI就可能需要跟着变更。早期kubernetes开发中,Pod对象的变化比较频繁,对于CRI这样的标准接口来说,这样的变更率有点麻烦。
所以在CRI的设计中,并没有一个直接创建Pod或者启动Pod的接口。在CRI中有RunPodSandbox的接口,其中的PodSandbox它并不是kubernetes里Pod的API对象,只是抽取了Pod中一部分与容器运行时有关的字段,如HostName、DnsConfig、CgroupParent等。
PodSandbox这个接口其实是kubernetes将Pod这个概念映射到容器运行时层面所需要的字段,是一个Pod对象的子集。作为容器项目,需要自己决定如何使用这些字段来实现kubernetes期望的Pod模型,它的原理如下图所示:
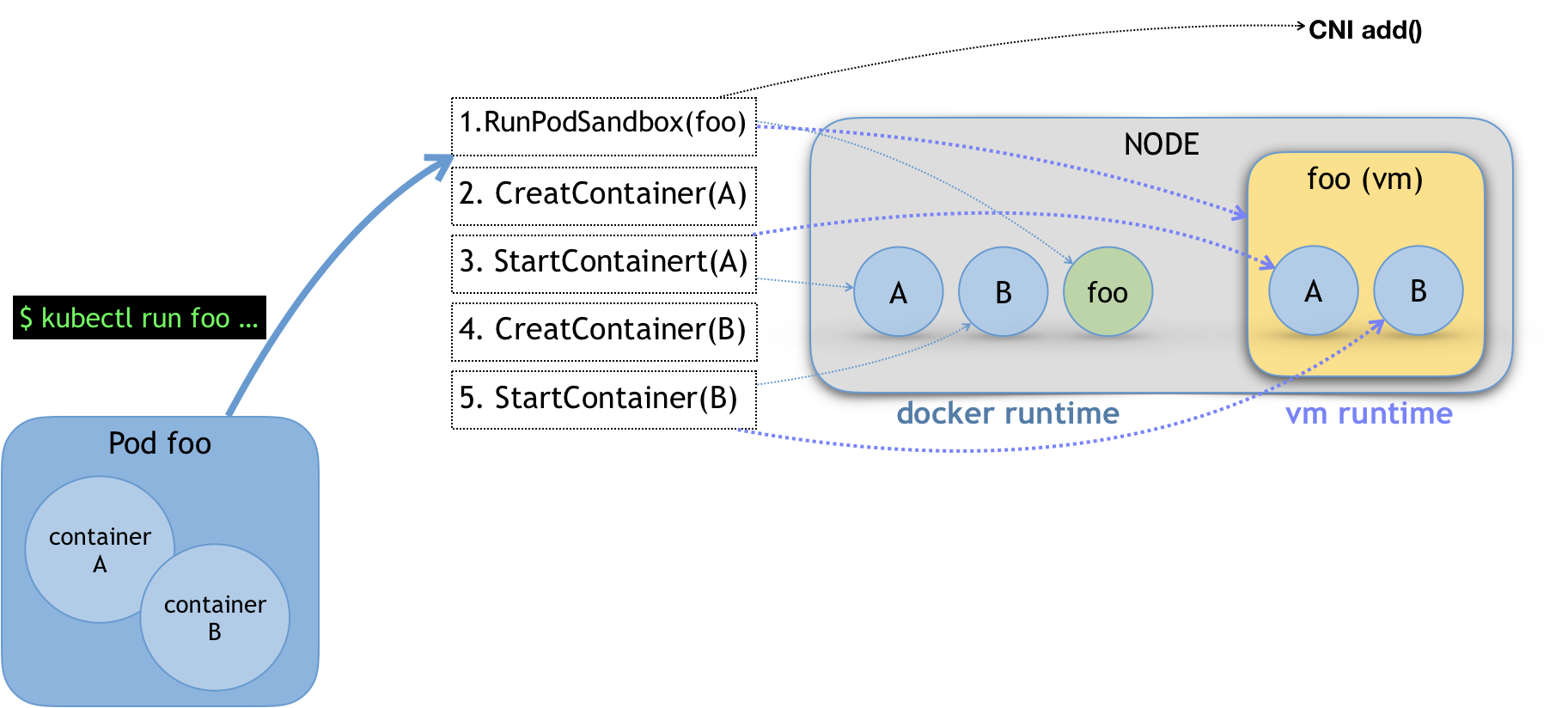
- 比如执行
kubectl run创建一个包含A和B两个容器的叫作foo的Pod之后,这个Pod的信息最后来到kubelet,kubelet会按照图中所示的顺序调用CRI接口。
在具体的CRI shim中,这些接口的实现是完全不同的:
- 如Docker项目的Dockershim就会创建一个叫作foo的Infra容器(pause容器),用来hold住整个Pod的Network Namespace
- 如基于虚拟化技术的容器Kata Containers项目的CRI实现会直接创建出一个轻量级虚拟机来充当Pod
-
在RunPodSandbox接口的实现中,还需要调用networkPlugin.SetUpPod(...)来为整个Sandbox设置网络。这个SetUpPod(...)方法,实际上就在执行CNI插件里的add(...)方法,即CNI插件为Pod创建网络,并且把Infra容器加入到网络中的操作。
-
kubelet继续调用CreateContainer和StartContainer接口来创建和启动容器A、B:对应到dockershim里,就直接启动A、B两个Docker容器。最后宿主机上出现三个Docker容器组成的这个Pod。
-
如果是Kata Container,CreateContainer和StartContainer接口的实现就之后在创建的轻量级虚拟机中创建A、B容器对应的Mount Namespace,最后在宿主机上,只会用一个叫作foo的轻量级虚拟机在运行。
0.2.1.2. 实现exec和logs接口
除了上述对容器声明周期的实现之外,CRI shim的另一个重要工作就是实现exec和logs等接口,这些接口与前面的操作有一个很大的不同,这些gRPC接口调用期间,kubelet需要跟容器项目维护一个长连接来传输数据,这种API称为Streaming API。
CRI shim中对Streaming API的实现,依赖于一套独立的Streaming Server机制,如下图所示:
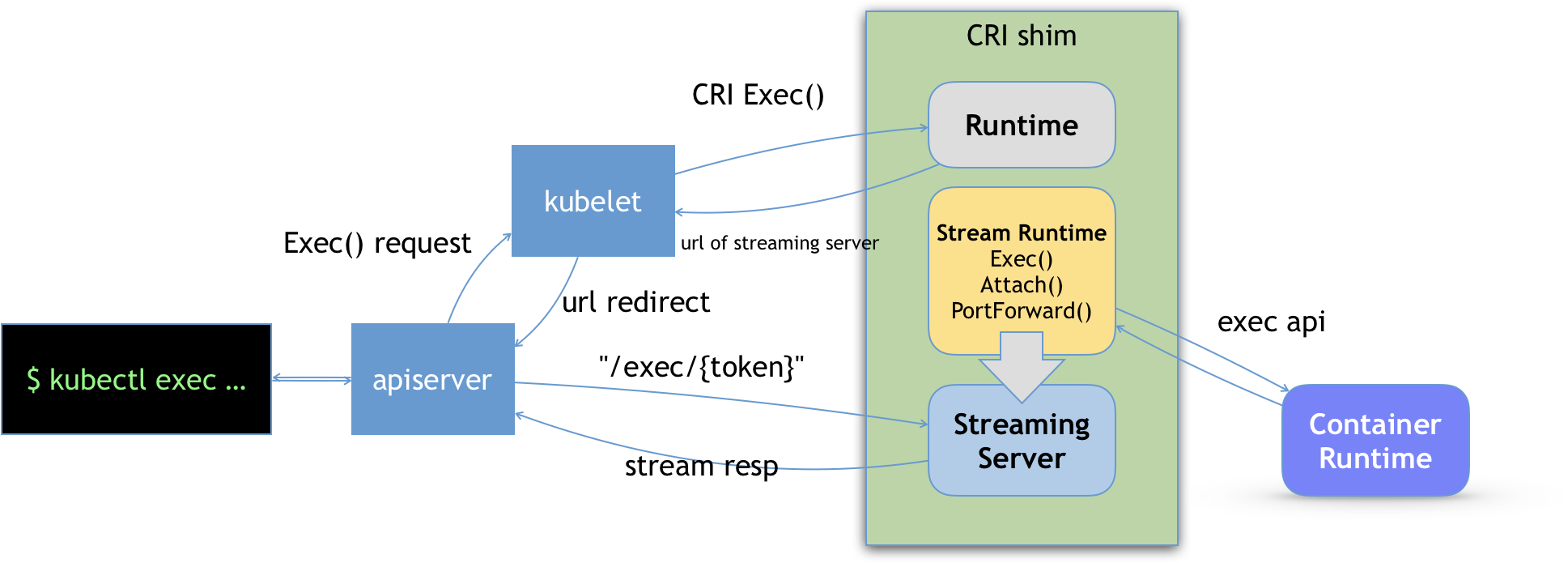
对一个容器执行kubectl exec 命令的时候:
- 这个请求首先被交给APIServer
- APIServer会调用kubelet的Exec API
- kubelet调用CRI的Exec接口
- CRI shim负责响应kubelet的这个调用请求,它不会直接去调用后端的容器项目来进行处理,只会返回一个URL(这个URL是该CRI shim对应的Streaming Server的地址和端口)给kubelet
- kubelet拿到这个URL后,以Redirect的方式返回给APIServer
- APIServer通过重定向来向Streaming Server发起真正的
/exec请求,与它建立长连接
此处的Streaming Server只需要通过使用SIG-Node维护的Streaming API库来实现,Streaming Server会在CRI shim启动时一起启动,一起启动的这一部分如何实现,由CRI shim自行决定,如Docker的dockershim就直接调用Docker的Exec API来作为实现。
0.2.2. ImageService
这个比较简单。
0.3. 总结
CRI接口的设计相对比较宽松,容器项目在实现CRI的具体接口时,拥有很高的自由,包括:
- 容器的声明周期管理
- 如何将Pod映射成为自己的实现
- 如何调动CNI插件为Pod设置网络
当对容器有特殊的需求是,优先考虑实现自己的CRI shim,而不是修改kubelet甚至容器项目的代码。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号