ROS机器人双驱小车制作(一)BOM清单
一、硬件
有很多人都在用ROS机器人操作系统作为机器人开发的工具,原因是ROS本身集成了大量的先进算法,不需要我们自己去写,而且整个系统是开源的,但是网上很多相关文章也都是翻译官方的英文教程,很多东西看了之后也联系不到一起,所以在这里本人我们将一步步记录ROS机器人小车的研发流程,一起探讨ROS机器人制作步骤,有何不妥支持还望各位及时指出!
1、材料清单
| 序号 | 主要模块 | 辅助模块 |
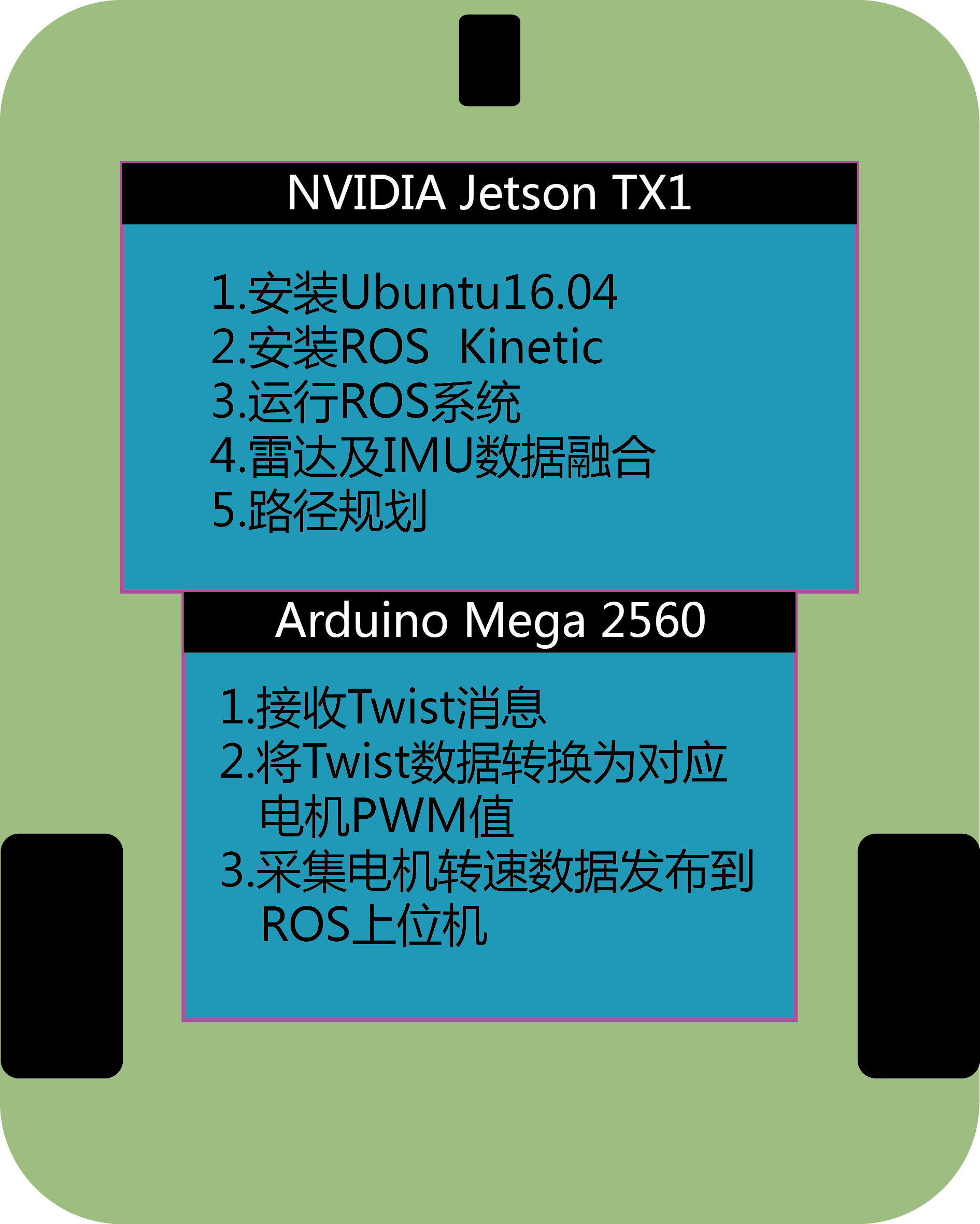
| 1 | NAIDIA Jetson TX1 | DC-DC降压模块 |
| 2 | Arduino Mega 2560 | 12V可充电锂电池 |
| 3 | HIPNUC/IMU姿态测量模块 | 直流无刷电机+电机驱动器(带测速功能) |
| 4 | Rplidar A2 | 车架、机械配件、车轮、线材 |
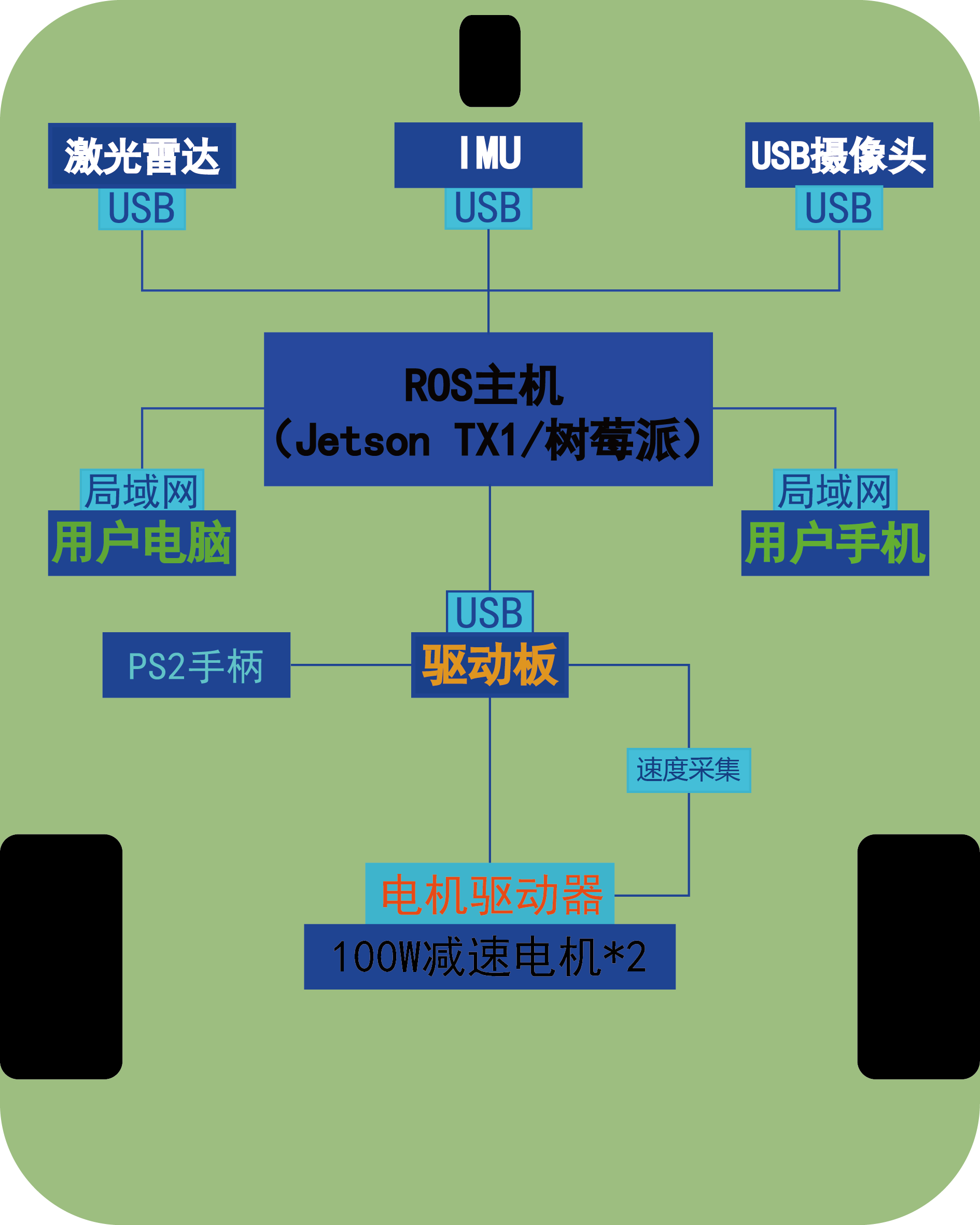
2、硬件连接
如果ROS上位机使用NVIDIA Jetson TX1则需要USB Hub来扩展USB口。
3、软件结构