

ucosIII 任务同步(信号量、任务信号量、事件标记组)
任务同步
简介
按博主自己理解,任务同步其实就是ucos指定了一种标志,用于中断(ISR)或任务间同步。例如ISR中断产生后,再ISR中只发送信号量或消息给任务,当ISR执行完毕后发送信号量,系统产生调度,在任务里面执行中断需要的服务,这样可以减少中断时间。
ucos有2种基本同步机制:信号量和事件标志。
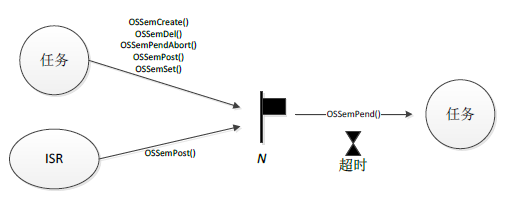
单向同步:
//任务同步
OS_SEM SYNC_SEM; //定义一个信号量
OSSemCreate(); //创建一个信号量
void task1(void *p_arg)
{
while(1)
{
scan()//扫描按键
if()//如果按键按下
{
OSSemPost(&SYNC_SEM,OS_OPT_POST_l,&err)//发送信号量
}
OSTimeDlyHMSM();//延时10ms
}
}
void task2(void *p_arg)
{
while(1)
{
OSSemPend(&SYNC_SEM,0,OS_OPT_PEND_BLOCKING,0,&err);//等待获取信号量
//执行
}
OSTimeDlyHMSM();//延时1s
}
任务1会10ms循环判断按键值,单按下按键时候会释放信号量,信号量+1;
当任务2等待的信号量大于1时会执行对应的操作,否则一直阻塞
任务1是10ms循环,当多次按键事件发生时候,信号量会一直递增,任务2每请求到信号量则会减1。从这里可以看出,信号量递交次数是会被记录下来,这个就是信用记录,任务2能够执行相同次数,当信号量减为0时候,任务2阻塞。
信号量的最大值由OS_SEM_CTR(os_type.h决定)
多任务同步一个信号量:
多个任务可以同时等待一个信号量 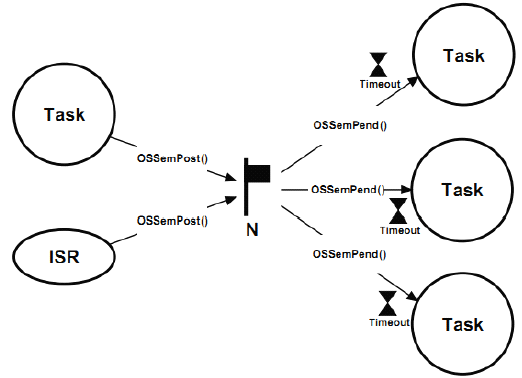
信号量发布时(OSSemPost)时,系统可以让当前最高优先级的任务就绪,也可以广播信号量让所有该信号量的挂起任务进入就绪态。
调用OSSemPost()选择参数OS_OPT_POST_ALL 就能实现广播信号量的功能。值得注意,当使用广播时候信号量不再是递增加1,而是递增挂起的任务个数。
广播用于多个任务间的同步,然而,若任务还需要与不在信号量挂起队列中的其它任务同步(例如广播时候任务还在执行没有被挂起),可以同时使用信号量和事件标志组实现同步的功能。
内嵌任务信号量:
除了独立创建的信号量,当我们创建任务时候,每个任务都有自己的内嵌信号量。使用内嵌信号量同步任务,不仅能够简化代码,而且比独立使用信号量更加有效。
| API | 注释 |
|---|---|
| OSTaskSemPend() | 等待任务信号量 |
| OSTaskSemPendAbort() | 取消等待任务信号量 |
| OSTaskSemPost() | 发布任务信号量 |
| OSTaskSemSet() | 强行设置任务信号量计数 |
当任务被创建时候,就会内建一个任务信号量,初始值为0,因此无需定义和创建信号量。
等待任务信号量
OS_TaskSemPend(OS_TICK timeout,//超时时间,0为一直等
OS_OPT opt,//是否阻塞模式
CPU_TS *p_ts,//时间戳
OS_ERR *P_err)
发布信号量
OSTaskSemPost(OS_TCB *p_tcb,//指向要用信号量通知的任务的TCB,NULL为向自己发送信号量
OS_OPT opt,//任务调度操作方式
OS_ERR *P_err)
双向同步:
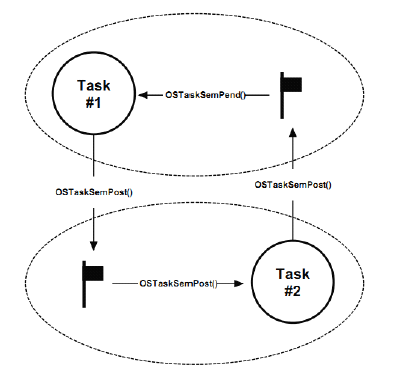
两个任务间可以用两个信号量实现双向同步。任务与ISR 间不能双向同步,因为ISR 中不能等待信号量(ISR 中不能有阻
塞呼叫)。双向同步可由两个外部信号量实现,也可用内嵌任务信号量实现。
void Task(...)
{
while(1)
{
...
OSTaskSemPost(&MYTask2_TCB,//发送信号量到任务2
OS_OPT_POST_NONE,
&err);
OSTaskSemPend(0,
OS_OPT_PEND_BLOCKING,
&ts,
&err);//等待信号量
}
}
void Task2()
{
while(1)
{
...
OSTaskSemPost(&MYTask1_TCB,//发送信号量到任务1
OS_OPT_POST_NONE,
&err);
OSTaskSemPend(0,
OS_OPT_PEND_BLOCKING,
&ts,
&err);//等待信号量
}
}
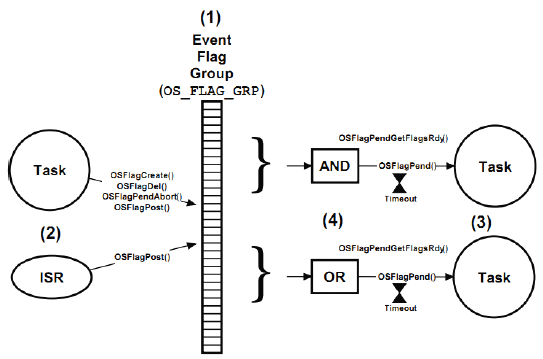
事件标志组
一个任务需要与多个事件同步,这个时候就需要使用事件标志组。
事件标志组有两种不同的同步机制:或同步和与同步。
“或”同步:等待多个事件时,任何一个事件发生 ,任务都被同步。
“与”同步:当所有的事件都发生时任务才被同步。
API函数以OSFlag…开头,API相关代码在OS_FLAG.C中。
在OS_CFG.H 中的OS_CFG_FLAG_EN 设置1使能时间标志组。
| API | 注释 |
|---|---|
| OSFlagCreate() | 创建事件标志组 |
| OSFlagDel() | 删除事件标志组 |
| OSFlagPend() | 等待事件标志组 |
| OSFlagPendAbort() | 取消等待事件标志组 |
| OSFlagPendGetFlagsRdy() | 获取任务就绪的事件标志 |
| OSFlagPost() | 向事件标志组发布标志 |
定义一个事件标志组
-
OS_FLAG_GRP EventFlags; //定义一个事件标志组 -
/*定义事件标志*/ -
#define FLAG1 (OS_FLAGS)0x01 -
#define FLAG2 (OS_FLAGS)0x02 -
#define FLAG3 (OS_FLAGS)0x03 -
创建一个事件标志组,最好在启动代码或者main里面创建
/**/
OSFlagCreate((OS_FLAG_GRP*)&EventFlags, //事件标志组
(CPU_CHAR*)"Event Flags", //
(OS_FLAGS)KEYFLAGS_VALUE, //flag初始值,一般为0
(OS_ERR*)&err); //
/*3.发布事件,返回值为调用后Flag的值*/
flags_num=OSFlagPost((OS_FLAG_GRP*)&EventFlags,
(OS_FLAGS)FLAG1+FLAG2, //设置哪个标志位
OS_OPT)OS_OPT_POST_FLAG_SET,//设置标志位为1,OS_OPT_POST_FLAG_CLR清零标志位
(OS_ERR*)&err);
/*4.等待事件标志组*/
OSFlagPend((OS_FLAG_GRP*)&EventFlags,
(OS_FLAGS)FLAG1+FLAG2,
(OS_TICK)0,//超时时间,0一直等
(OS_OPT)OS_OPT_PEND_FLAG_SET_ALL+OS_OPT_PEND_FLAG_CONSUME,//CONSUME表示获得后,将1设置为0,或者将0设置为1.根据post中是SET还是CLR
(CPU_TS*)0,//时间戳
(OS_ERR*)&err);
Pend API接口详细说明
OSFlagPend(OS_FLAG_GRP *p_rgp,//
OS_FLAGS flags,//
OS_TICK timeout,//
OS_OPT opt,//任务pend的条件,详见下表
CPU_TS *p_ts,//
OS_ERR *p_err)//转自:https://blog.csdn.net/bandaoyu/article/details/83269541

