

ceph:消息通信机制小记--研读
目录
原文:https://zhuanlan.zhihu.com/p/111914519
分布式存储系统,需要一个稳定的网络通信机制,来实现客户端和服务端的消息通信。ceph有三种消息通信框架:simple,xio和async。目前只研究了async。
Messenger的创建
消息的收发和处理都是异步的,所以必须需要单独的模块来处理。所有模块(mon,osd, mds等)在启动阶段都会创建一个Messenger。既然是async的通信框架,那必须有单独的线程来处理消息收发,所以在创建Messenger时必须启动多个线程。以ceph-mon为例,创建Messenger
Messenger *msgr = Messenger::create(g_ceph_context, public_msgr_type,entity_name_t::MON(rank),
"mon", 0, Messenger::HAS_MANY_CONNECTIONS)
Messenger::create
Messenger *Messenger::create(CephContext *cct, const string &type, entity_name_t name, string lname,
uint64_t nonce, uint64_t cflags)
{ // name = entity_name_t::MON(rank), lname = "mon"
...
else if (r == 1 || type.find("async") != std::string::npos)
return new AsyncMessenger(cct, name, type, std::move(lname), nonce);
...
}
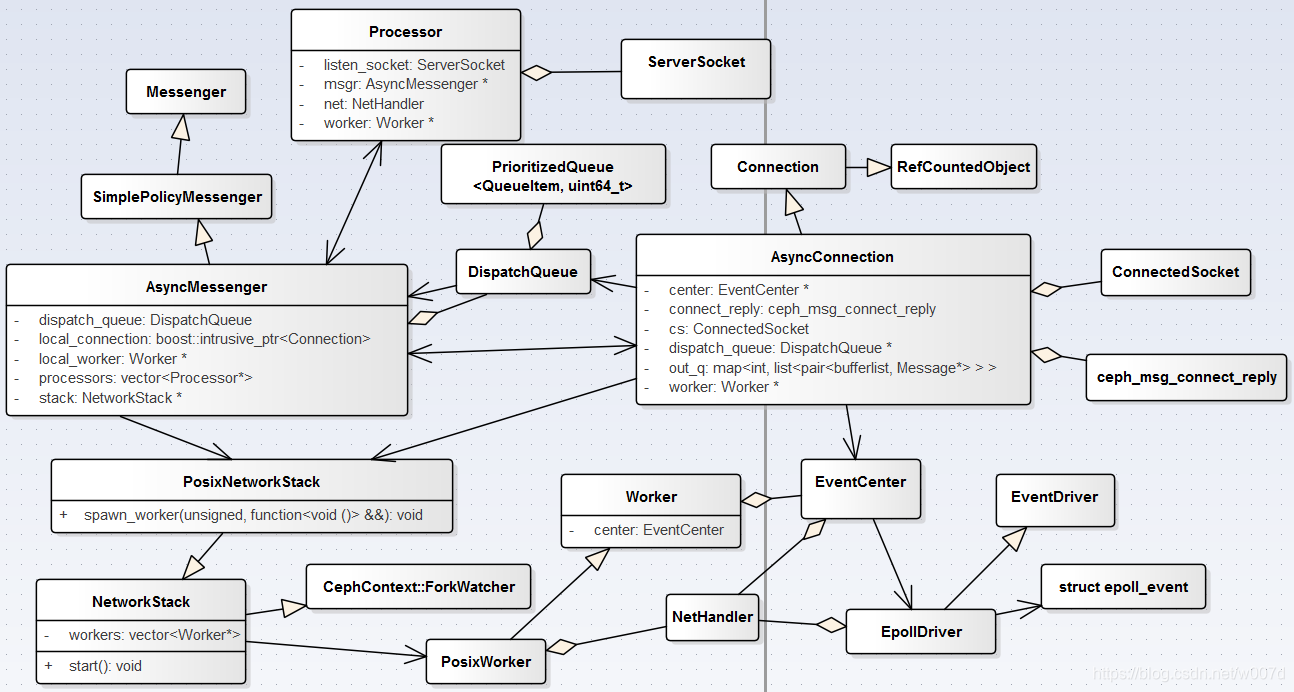
AsyncMessenger中的几个重要成员
class AsyncMessenger : public SimplePolicyMessenger {
private:
NetworkStack *stack; // 起线程
std::vector<Processor*> processors; // 主要用来监听连接
DispatchQueue dispatch_queue; // 用来分发消息
ceph::unordered_map<entity_addr_t, AsyncConnectionRef> conns // 保存已建立的连接
...
}
接下来就是new AsyncMessenger的过程。
AsyncMessenger::AsyncMessenger(CephContext *cct, entity_name_t name,
const std::string &type, string mname, uint64_t _nonce)
: SimplePolicyMessenger(cct, name,mname, _nonce), dispatch_queue(cct, this, mname), ...
{
...
StackSingleton *single;
// 创建一个StackSingleton的单例
cct->lookup_or_create_singleton_object<StackSingleton>(single, "AsyncMessenger::NetworkStack::"+transport_type);
single->ready(transport_type);
stack = single->stack.get();
stack->start();
// 获取worker
local_worker = stack->get_worker();
local_connection = new AsyncConnection(cct, this, &dispatch_queue, local_worker);
init_local_connection();
reap_handler = new C_handle_reap(this);
unsigned processor_num = 1;
if (stack->support_local_listen_table())
processor_num = stack->get_num_worker();
for (unsigned i = 0; i < processor_num; ++i)
processors.push_back(new Processor(this, stack->get_worker(i), cct));
}AsyncMessenger初始化的过程很简单,先将几个重要的成员初始化。这里面比较重要的是stack的初始化,先是创建一个StackSingleton的单例
struct StackSingleton {
CephContext *cct;
std::shared_ptr<NetworkStack> stack;
StackSingleton(CephContext *c): cct(c) {}
void ready(std::string &type) {
if (!stack)
stack = NetworkStack::create(cct, type);
}
}
然后通过single->ready --> NetworkStack::create来创建NetwrokStack,流程如下

创建Worker和Epoll句柄
NetworkStack::create
std::shared_ptr<NetworkStack> NetworkStack::create(CephContext *c, const string &t)
{
if (t == "posix")
return std::make_shared<PosixNetworkStack>(c, t);
...
}
NetworkStack和子类PosixNetworkStack中几个重要成员如下:
class NetworkStack : public CephContext::ForkWatcher {
std::string type; // type = "posix"
unsigned num_workers = 0; // num_workers = 3
...
std::function<void ()> add_thread(unsigned i);
protected:
CephContext *cct;
vector<Worker*> workers; // 存着三个PosixWorker
...
}
class PosixNetworkStack : public NetworkStack {
vector<int> coreids;
vector<std::thread> threads; // threads存着三个add_thread()中的匿名函数
...
}NetworkStack中的workers用来保存多个Worker,每个Worker都会创建一个Epoll(大多的网络编程中,都会使用基于事件通知的异步网络IO方式来实现,比如Epoll和Kqueue,ceph的网络模块使用的是Epoll)。在NetworkStack的构造函数中,会创建三个Worker
NetworkStack::NetworkStack(CephContext *c, const string &t): type(t), started(false), cct(c)
{
const uint64_t InitEventNumber = 5000;
num_workers = cct->_conf->ms_async_op_threads; // num_workers = 3
for (unsigned i = 0; i < num_workers; ++i) {
Worker *w = create_worker(cct, type, i);
w->center.init(InitEventNumber, i, type);
workers.push_back(w);
}
cct->register_fork_watcher(this);
}NetworkStack::create_worker如下
Worker* NetworkStack::create_worker(CephContext *c, const string &type, unsigned i)
{
if (type == "posix")
return new PosixWorker(c, i);
...
} Worker和PosixWorker中几个重要成员如下:
class Worker : public Thread {
...
EventCenter center;
...
}
class PosixWorker : public Worker {
NetHandler net;
...
}
EventCenter(事件中心)是一个处理事件的数据结构,相当于一个事件处理的容器。它本身并不真正去处理事件,通过回调函数的方式来完成事件的处理。同样,如何获取需要处理的事件也不是事件中心来完成的,它只负责处理,具体对需要处理的事件的获取是通过EventDriver来完成的。EventDriver是一个接口类,其实现主要是由EpollDriver、KqueueDriver和SelectDriver三个类操作的。Ceph支持多种操作系统的使用,如果使用的是Linux操作系统,使用EpollDriver,如果是BSD,使用KqueueDriver,如果都不是的情况下再使用SelectDriver(系统定义为最坏状况下)。EpollDriver封装了epoll的接口,事件驱动的执行主要依赖于epoll的方式,其中主要有三个函数:epoll_create,创建epoll句柄; epoll_ctl,将被监听的描述符fd添加到epoll句柄或从epoll句柄中删除或者对监听事件进行修改;epoll_wait,等待事件触发(观察就绪列表里面有没有数据,并进行提取和清空就绪列表,非常高效)。
class EpollDriver : public EventDriver {
int epfd;
struct epoll_event *events;
CephContext *cct;
int size;
...
}启动线程
在AsyncMessenger的构造函数中创建Worker后,就该启动Worker中的线程,在启动线程的过程中,重要的有两点:1,加入监听事件;2,等待并处理事件。
从stack->start()开始,代码如下
void NetworkStack::start()
{
...
for (unsigned i = 0; i < num_workers; ++i) {
if (workers[i]->is_init())
continue;
std::function<void ()> thread = add_thread(i); // add_thread返回一个匿名函数
spawn_worker(i, std::move(thread));
}
...
}
遍历workers,执行spawn_worker,在spawn_worker中执行std::thread(func)启动线程。
void spawn_worker(unsigned i, std::function<void ()> &&func) override {
threads.resize(i+1);
threads[i] = std::thread(func);
}线程执行的函数func如下
[this, w]() {
char tp_name[16];
sprintf(tp_name, "msgr-worker-%u", w->id);
ceph_pthread_setname(pthread_self(), tp_name);
const uint64_t EventMaxWaitUs = 30000000;
w->center.set_owner(); // 加入监听事件
w->initialize();
w->init_done();
while (!w->done) {
ceph::timespan dur;
int r = w->center.process_events(EventMaxWaitUs, &dur); // 等待并处理事件
...
}
...
}加入监听事件
在EventCenter::init过程中,会创建一个管道,并将管道r/w两个文件描述符赋值给EventCenter中notify_receive_fd和notify_send_fd,如下
int EventCenter::init(int n, unsigned i, const std::string &t)
{ ...
int fds[2];
if (pipe(fds) < 0) {
lderr(cct) << __func__ << " can't create notify pipe" << dendl;
return -errno;
}
notify_receive_fd = fds[0];
notify_send_fd = fds[1];
...
}
所有的监听事件都有对应的处理函数:读和写,封装在FileEvent中。
struct FileEvent {
int mask;
EventCallbackRef read_cb;
EventCallbackRef write_cb;
}
w->center.set_owner()将notify_receive_fd加入epoll队列,并且fd和对应的FileEvent都存在file_events中。这样的话,如果监听到有事件,获取到fd后,就可以从file_events中拿出回调去处理事件。
vector<FileEvent> file_events;
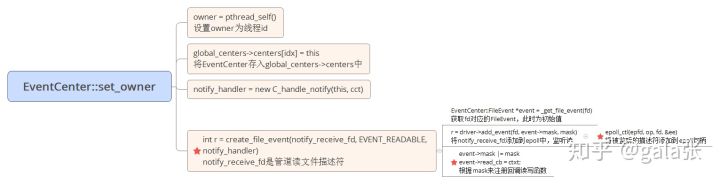
EventCenter::set_owner的流程如下
代码如下
void EventCenter::set_owner()
{
owner = pthread_self();
if (!global_centers) {
cct->lookup_or_create_singleton_object<EventCenter::AssociatedCenters>(
global_centers, "AsyncMessenger::EventCenter::global_center::"+type);
global_centers->centers[idx] = this;
if (driver->need_wakeup()) {
notify_handler = new C_handle_notify(this, cct);
int r = create_file_event(notify_receive_fd, EVENT_READABLE, notify_handler);
assert(r == 0);
}
}
}notify_handler就是notify_receive_fd的事件回调函数 对象,EventCenter::create_file_event将notify_receive_fd加入epoll的监听队列中,并且注册回调函数 对象,如下:
int EventCenter::create_file_event(int fd, int mask, EventCallbackRef ctxt)
{
int r = 0;
...
EventCenter::FileEvent *event = _get_file_event(fd);
r = driver->add_event(fd, event->mask, mask);
event->mask |= mask;
if (mask & EVENT_READABLE) { event->read_cb = ctxt; }
if (mask & EVENT_WRITABLE) { event->write_cb = ctxt; }
...
return 0;
}#undef dout_prefix #define dout_prefix *_dout << "EventCallback " class C_handle_notify : public EventCallback { EventCenter *center; CephContext *cct; public: C_handle_notify(EventCenter *c, CephContext *cc): center(c), cct(cc) {} void do_request(int fd_or_id) { char c[256]; int r = 0; do { r = read(fd_or_id, c, sizeof(c)); //fd_or_id如果已经设置为阻塞模式就会阻塞等待数据,如果没有设置为阻塞就不会阻塞 if (r < 0) { if (errno != EAGAIN) ldout(cct, 1) << __func__ << " read notify pipe failed: " << cpp_strerror(errno) << dendl; } } while (r > 0); } }; |
管道是一种最基本的IPC机制,作用于有血缘关系的进程之间,完成数据传递。这里监听管道读事件描述符的作用是:一般IO复用是使用 one loop per thread 的模型,阻塞等待的一般都是可读事件,但是监听可写需实时添加(如添加到epoll_base)。如果遇到wait线程在等待可读事件,并一直阻塞下去,此时有一个线程想添加监听可写事件,这时需要唤醒wait,(执行wait判断,并执行while 内wait之后的代码)添加可写事件(到监听队列)。(wait在监听)直接唤醒wait的方式就是可读事件,那么只需要给wait一个可读事件即可。因此epoll需要多监听一个fd作为唤醒wait的专用fd,可以用pipe, 可以用其他的eventfd,需要唤醒是向该fd写入数据使得wait监听到即可。这里使用pipe,开启一个pipe,将读端的fd加入监听队列(红黑树),那么当需要唤醒使wait返回时,只需要向pipe写端写入数据即可。
| void EventCenter::wakeup() ldout(cct, 2) << __func__ << dendl; |
等待并处理事件
接下来是while循环,来执行EventCenter::process_events。这里事件有三类
- time_events:定时事件,比如connection的定时函数AsyncConnection::tick。
- external_events:外部事件,比如要发送消息时,send_message就是外部事件。
- 可读事件:epoll监听的事件,比如socket连接的对端发来的消息。
EventCenter::process_events的逻辑比较明显,分为两部分:超时监听,回调事件注册函数。
超时一般设置为30秒,但是并不固定,与external_events和time_events有关。如果有external_events,则超时时间为0,即不阻塞等待,先去处理external_events;如果有time_events,根据定时的时间和30秒来确定超时时间。超时时间确定后,就开始等待。
int EventCenter::process_events(int timeout_microseconds, ceph::timespan *working_dur)
{ // timeout_microseconds = 30,000,000
struct timeval tv;
int numevents;
bool trigger_time = false;
auto now = clock_type::now();
auto it = time_events.begin();
bool blocking = pollers.empty() && !external_num_events.load();
// If exists external events or poller, don't block
if (!blocking) { // 如果有外部事件
if (it != time_events.end() && now >= it->first)
trigger_time = true;
tv.tv_sec = 0;
tv.tv_usec = 0;
} else {
clock_type::time_point shortest;
shortest = now + std::chrono::microseconds(timeout_microseconds);
if (it != time_events.end() && shortest >= it->first) {
shortest = it->first;
trigger_time = true;
if (shortest > now) {
timeout_microseconds = std::chrono::duration_cast<std::chrono::microseconds>(
shortest - now).count();
} else {
shortest = now;
timeout_microseconds = 0;
}
}
tv.tv_sec = timeout_microseconds / 1000000; // tv.tv_sec = 30
tv.tv_usec = timeout_microseconds % 1000000; // tv.tv_usec = 0
}
vector<FiredFileEvent> fired_events;
numevents = driver->event_wait(fired_events, &tv); // 等待事件触发
...
}
在EpollDriver::event_wait中,如果有就绪事件,则将fd和事件类型(EVENT_READABLE/EVENT_WRITABLE)保存在fired_events。
| 1 | int EpollDriver::event_wait(vector<FiredFileEvent> &fired_events, struct timeval *tvp) |
process_events线程原本在wait处阻塞,此时fired_events中有了数据唤醒event_wait(numevents = driver->event_wait(fired_events, &tv);),接下来就是处理事件,即回调事件注册函数。
int EventCenter::process_events(int timeout_microseconds, ceph::timespan *working_dur)
{
...
numevents = driver->event_wait(fired_events, &tv);<---------唤醒event_wait
for (int j = 0; j < numevents; j++) {
int rfired = 0;
FileEvent *event;
EventCallbackRef cb;
event = _get_file_event(fired_events[j].fd);
// 回调监听事件函数
if (event->mask & fired_events[j].mask & EVENT_READABLE) {
rfired = 1;
cb = event->read_cb;
cb->do_request(fired_events[j].fd);
}
if (event->mask & fired_events[j].mask & EVENT_WRITABLE) {
if (!rfired || event->read_cb != event->write_cb) {
cb = event->write_cb;
cb->do_request(fired_events[j].fd);
}
}
}
...
if (external_num_events.load()) { // 处理外部事件
external_lock.lock();
deque<EventCallbackRef> cur_process;
cur_process.swap(external_events);
external_num_events.store(0);
external_lock.unlock();
numevents += cur_process.size();
while (!cur_process.empty()) {
EventCallbackRef e = cur_process.front();
e->do_request(0);
cur_process.pop_front();
}
}
...
return numevents;
}
服务端bind
服务端和客户端是通过socket来通信,服务端的建立过程还是那几步:socket() –> bind() –> listen() –> accept() –> recv/send。其中socket() –> bind() –> listen()可以看做是Processor的bind过程(最终封装在PosixWorker::listen函数中/RDMAWorker/DPDKWorker)。socket的流程基本上没什么可记录的,网上一大堆。但是Processor::bind并不是直接去调用PosixWorker::listen,因为AsyncMessenger::bind --> Processor::bind这个过程是由主线程调用的,Processor有属于自己的线程,这里它得切换到自己线程上去执行。
AsyncMessenger::bind
int AsyncMessenger::bind(const entity_addr_t &bind_addr)
{
// bind to a socket
set<int> avoid_ports;
entity_addr_t bound_addr;
unsigned i = 0;
for (auto &&p : processors) { // processors中只有一个元素
int r = p->bind(bind_addr, avoid_ports, &bound_addr);
...
++i;
}
_finish_bind(bind_addr, bound_addr);
return 0;
}
Processor::bind
int Processor::bind(const entity_addr_t &bind_addr, const set<int>& avoid_ports, entity_addr_t* bound_addr)
{
...
/* bind to port */
int r = -1;
for (int i = 0; i < conf->ms_bind_retry_count; i++) { // conf->ms_bind_retry_count = 6
if (i > 0) { sleep(conf->ms_bind_retry_delay); } // conf->ms_bind_retry_delay = 6,如果先前一次bind失败,每个循环睡眠6秒
if (listen_addr.get_port()) { // ceph_mon中端口固定为6789
worker->center.submit_to(worker->center.get_id(), [this, &listen_addr, &opts, &r]() {
r = worker->listen(listen_addr, opts, &listen_socket);},
false);
if (r < 0) continue;
}
...
return 0;
}
worker->center.submit_to就是去判断目前所在的线程是否是自己的线程,如果是就直接执行worker->listen,反之,则去唤醒自己的线程去执行。(AsyncMessenger::bind --> Processor::bind这个过程是由主线程调用的,Processor有属于自己的线程,这里它得切换到自己线程上去执行。)
流程如下

代码如下
template <typename func>
void submit_to(int i, func &&f, bool nowait = false)
{
assert(i < MAX_EVENTCENTER && global_centers);
EventCenter *c = global_centers->centers[i];
assert(c);
if (!nowait && c->in_thread()) // c->in_thread()就是判断是否是自己的线程
{
f();
return ;
}
if (nowait)
{
...
}
else
{
C_submit_event<func> event(std::move(f), false); // 创建回调类
c->dispatch_event_external(&event);
event.wait();
}
};EventCenter::dispatch_event_external(e)就是去唤醒epoll_wait然后去执行回调函数EventCallback:: do_request(event->do_request)。(EventCenter::dispatch_event_external将回调函数e放入 external_events,wakeup (通过向epoll监听的管道写入数据的方式))
void EventCenter::dispatch_event_external(EventCallbackRef e)
{
external_lock.lock();
external_events.push_back(e); // 将事件加入external_events队列
bool wake = !external_num_events.load(); // external_num_events为0,所以wake就是true
uint64_t num = ++external_num_events; // num = ++external_num_events = 1
external_lock.unlock();
if (!in_thread() && wake)
wakeup(); // 去唤醒epoll_wait
}
EventCenter::wakeup
void EventCenter::wakeup()
{
...
char buf = 'c';
// wake up "event_wait"
int n = write(notify_send_fd, &buf, sizeof(buf)); // 往管道中写数据,来唤醒epoll_wait
if (n < 0) { ... }
}
}
epoll_wait被唤醒后,先去读管道数据,管道中的数据没有特别的意义(只是个触发引子)。接着就是去处理external_events中的事件
int EventCenter::process_events(int timeout_microseconds, ceph::timespan *working_dur)
{
...
if (external_num_events.load())
{
external_lock.lock();
deque<EventCallbackRef> cur_process;
cur_process.swap(external_events); // 获取external_events
external_num_events.store(0);
external_lock.unlock();
numevents += cur_process.size();
while (!cur_process.empty())
{
EventCallbackRef e = cur_process.front();
e->do_request(0); // 执行回调
cur_process.pop_front();
}
}
...
return numevents;
}
e->do_request(0)就是去执行回调,流程如下
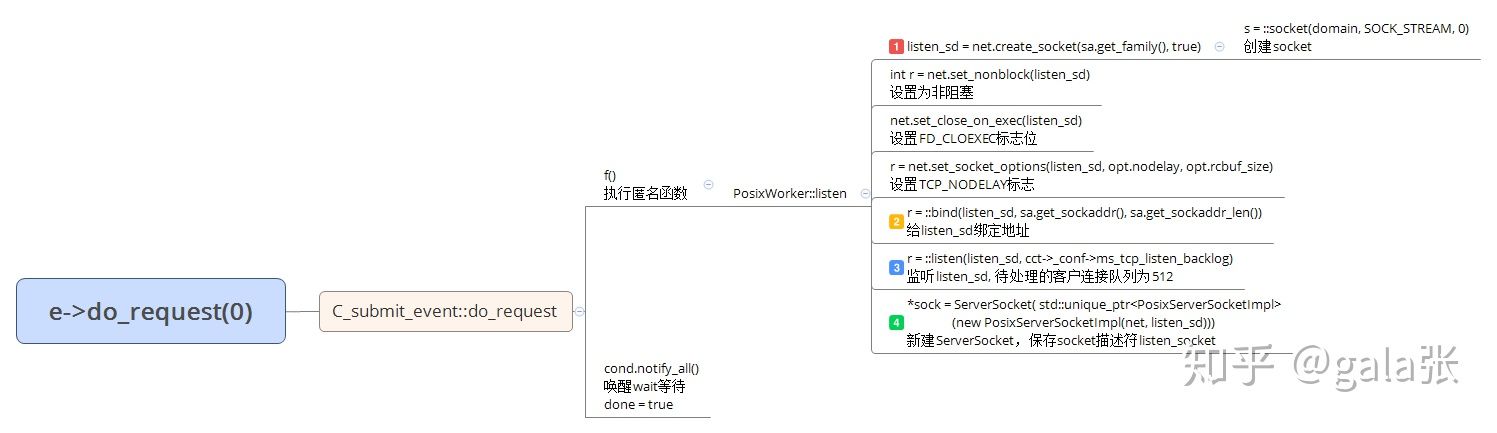
PosixWorker::listen
int PosixWorker::listen(entity_addr_t &sa, const SocketOptions &opt, ServerSocket *sock)
{
int listen_sd = net.create_socket(sa.get_family(), true); // 创建socket
// 设置为非阻塞,即它在读取不到数据时结果为-1,并且设置errno为EAGAIN,而不会阻塞等待
int r = net.set_nonblock(listen_sd);
// 设置FD_CLOEXEC标志位,即子进程在执行exec后关闭子进程中的fd
net.set_close_on_exec(listen_sd);
// 设置TCP_NODELAY标志。Nginx指令tcp_nodelay作用于socket参数TCP_NODELAY。
// 在这之前,我们先说说nagle缓存算法,有些应用程序在网络通讯的时候会发送很少的字节,比如说一个字节,那么再加TCP协议本身,实际上发的要41个字节,这样的效率是很低的。这时候nagle算法就应运而生了,它将要发送的数据存放在缓存里,当积累到一定量或一定时间,再将它们发送出去。
// 这里TCP_NODELAY就是nagle启用与否的开关,所以下面的指令(tcp_nodelay on)的效果就是禁用nagle算法,也即不缓存数据。
r = net.set_socket_options(listen_sd, opt.nodelay, opt.rcbuf_size);
// 给listen_sd绑定地址
r = ::bind(listen_sd, sa.get_sockaddr(), sa.get_sockaddr_len());
// 监听listen_sd, 待处理的客户连接队列为512
r = ::listen(listen_sd, cct->_conf->ms_tcp_listen_backlog); // cct->_conf->ms_tcp_listen_backlog = 512
*sock = ServerSocket( std::unique_ptr<PosixServerSocketImpl>(new PosixServerSocketImpl(net, listen_sd)));
return 0;
}
服务端listen
bind完后,就得去listen socket的fd,从Monitor::init开始,流程如下

Monitor::init
int Monitor::init()
{
...
// i'm ready!
messenger->add_dispatcher_tail(this);
...
return 0;
}
将mon加入dispatchers队列
void add_dispatcher_tail(Dispatcher *d) {
bool first = dispatchers.empty();
dispatchers.push_back(d);
if (d->ms_can_fast_dispatch_any())
fast_dispatchers.push_back(d);
if (first) // first为true
ready();
}
AsyncMessenger::ready
void AsyncMessenger::ready()
{
stack->ready();
for (auto &&p : processors)
p->start();
dispatch_queue.start();
}
Processor::start就开始去监听
void Processor::start()
{
// start thread
if (listen_socket) {
worker->center.submit_to(worker->center.get_id(), [this]() {
worker->center.create_file_event(listen_socket.fd(), EVENT_READABLE, listen_handler); }, false);
}
}还是一样,去唤醒Processor中的线程,执行EventCenter::create_file_event,将socket fd加入epoll事件中,并注册回调事件,执行pro->accept(),如果有连接来,就去accept,建立socket连接。
listen_handler(new C_processor_accept(this));
class Processor::C_processor_accept : public EventCallback {
Processor *pro;
public:
...
void do_request(uint64_t id) override {
pro->accept();
}
};
在AsyncMessenger::ready中还创建了2个线程
void DispatchQueue::start()
{
assert(!stop);
assert(!dispatch_thread.is_started());
dispatch_thread.create("ms_dispatch");
local_delivery_thread.create("ms_local");
}
处理连接
如果有连接过来,唤醒epoll_wait,建立连接,在EventCenter::process_events执行listen_socket对应的回调函数Processor::accept
void Processor::accept()
{
SocketOptions opts;
opts.nodelay = msgr->cct->_conf->ms_tcp_nodelay;
opts.rcbuf_size = msgr->cct->_conf->ms_tcp_rcvbuf;
opts.priority = msgr->get_socket_priority();
while (true) {
entity_addr_t addr;
ConnectedSocket cli_socket;
Worker *w = worker;
// msgr->get_stack()->support_local_listen_table()为false
if (!msgr->get_stack()->support_local_listen_table())
w = msgr->get_stack()->get_worker(); //选一个负载较小的worker
int r = listen_socket.accept(&cli_socket, opts, &addr, w);
if (r == 0) {
msgr->add_accept(w, std::move(cli_socket), addr);
continue;
} else { ... }
}
}Processor::accept可以分为两个过程:建立连接和将cli_socket加入epoll监听。
在建立连接之前先去选一个当前负载最小的worker,这个worker与新建的Connection绑定,该连接上的IO事件都会由此worker来处理。listen_socket.accept最终调用的是PosixServerSocketImpl::accept
int PosixServerSocketImpl::accept(ConnectedSocket *sock, const SocketOptions &opt, entity_addr_t *out, Worker *w)
{
sockaddr_storage ss;
socklen_t slen = sizeof(ss);
// 接受连接,_fd是非阻塞的,非阻塞倾听socket,在有没有连接时都accept立即返回,
int sd = ::accept(_fd, (sockaddr*)&ss, &slen);
if (sd < 0) { // 非阻塞模式下,没有连接时,返回值是-1,并且错误码是EAGAIN or EWOULDBLOCK
return -errno;
}
handler.set_close_on_exec(sd);
int r = handler.set_nonblock(sd); // 设置为非阻塞,
r = handler.set_socket_options(sd, opt.nodelay, opt.rcbuf_size);
out->set_sockaddr((sockaddr*)&ss); // 填充addr
handler.set_priority(sd, opt.priority, out->get_family());
std::unique_ptr<PosixConnectedSocketImpl> csi(new PosixConnectedSocketImpl(handler, *out, sd, true));
*sock = ConnectedSocket(std::move(csi));
return 0;
}
}连接建立完后,需要创建AsyncConnection。socket连接建立了,并不代表可以发消息,AsyncConnection可以看作socket的上层,连接的创建和删除、数据的读写指令、连接的重建、消息的处理等都是在这个类中进行。
void AsyncMessenger::add_accept(Worker *w, ConnectedSocket cli_socket, entity_addr_t &addr)
{
lock.Lock();
AsyncConnectionRef conn = new AsyncConnection(cct, this, &dispatch_queue, w);
conn->accept(std::move(cli_socket), addr);
accepting_conns.insert(conn);
lock.Unlock();
}AsyncConnection::accept唤醒AsyncConnection绑定的worker去执行read_handler事件
void AsyncConnection::accept(ConnectedSocket socket, entity_addr_t &addr)
{
std::lock_guard<std::mutex> l(lock);
cs = std::move(socket);
socket_addr = addr;
state = STATE_ACCEPTING;
// rescheduler connection in order to avoid lock dep
center->dispatch_event_external(read_handler);
}
read_handler定义如下
read_handler = new C_handle_read(this);
...
class C_handle_read : public EventCallback {
AsyncConnectionRef conn;
public:
...
void do_request(uint64_t fd_or_id) override {
conn->process();
}
};
AsyncConnection::process中主要做三件事:
- 将fd加入epoll,并注册read_handle到events中
- 将服务端和客户端的addr发送给客户端
- 将connect的状态转换为STATE_ACCEPTING_WAIT_BANNER_ADDR
这之后就涉及到AsyncConnection的状态转换。
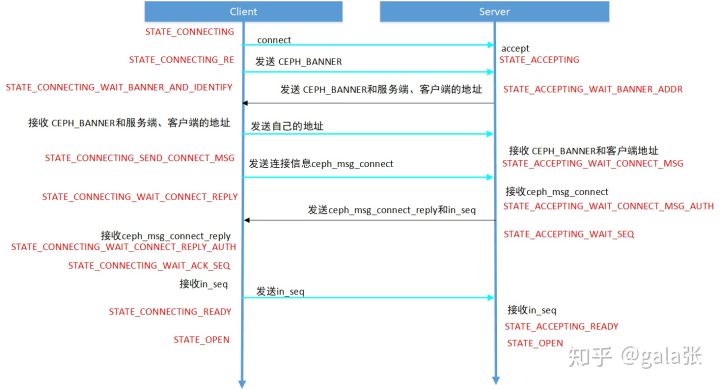
AsyncConnection的状态转换
AsyncConnection有很多个状态,可以简单分为connect,accept,open, standby,closed,wait。socket连接建立后,还需要将AsyncConnection的状态转换为STATE_OPEN,才可以正常发送消息,STATE_CONNECTING/STATE_ACCEPTING状态切换到SATE_OPEN的过程中,会去做一些校验,这个过程很有必要。如下是状态切换的流程图。
消息发送过程
先码...
AsyncMessenger启动接收线程
https://blog.csdn.net/w007d/article/details/81432966
OSD::init
|---client_messenger->add_dispatcher_head(this) // Messenger.h void add_dispatcher_head(Dispatcher *d)
|---bool first = dispatchers.empty() // 初始化时dispatcher为空,list<Dispatcher*> dispatchers
|---dispatchers.push_front(d);
|---ready() // void AsyncMessenger::ready()
|---stack->ready() // PosixNetworkStack : public NetworkStack 的ready
|---for (auto &&p : processors)
|---p->start(); // void Processor::start() 启动work
|---worker->center.submit_to(worker->center.get_id(),
[this]() { worker->center.create_file_event(listen_socket.fd(), EVENT_READABLE, listen_handler); }, false);
// 执行EventCenter::create_file_event
|---EventCenter::FileEvent *event = _get_file_event(fd);
|---r = driver->add_event(fd, event->mask, mask); // int EpollDriver::add_event(int fd, int cur_mask, int add_mask)
|---if (epoll_ctl(epfd, op, fd, &ee) == -1) // 唤醒 EventCenter::process_events
|---if (mask & EVENT_READABLE)
|---event->read_cb = ctxt // 读回调
|---if (mask & EVENT_WRITABLE)
|---event->write_cb = ctxt // 写回调
|---dispatch_queue.start() // DispatchQueue::start()
|---dispatch_thread.create("ms_dispatch") // 启动线程 DispatchQueue::entry()
|---while (true) {
|---while (!mqueue.empty()) {
|---if (qitem.is_code())
|---local_delivery_cond.Wait(local_delivery_lock);
|---else
|---Message *m = qitem.get_message();
|---msgr->ms_deliver_dispatch(m) // Messenger.h ms_deliver_dispatch
|---for (list<Dispatcher*>::iterator p = dispatchers.begin()
|---if ((*p)->ms_dispatch(m)) // OSD::ms_dispatch(Message *m) 对应的类处理函数的入口
|---post_dispatch(m, msize);
|---dispatch_throttle_release(msize)
|---cond.front()->SignalOne(); //唤醒线程
|---cond.Wait(lock)
|---local_delivery_thread.create("ms_local") // 启动线程 DispatchQueue::run_local_delivery()
|---while (true) {
|---if (local_messages.empty()) {
|---local_delivery_cond.Wait(local_delivery_lock)
|---fast_preprocess(m);
|---msgr->ms_fast_preprocess(m)
|---for (list<Dispatcher*>::iterator p = fast_dispatchers.begin()
|---(*p)->ms_fast_preprocess(m) // OSD::ms_fast_preprocess(Message *m)
|---if (can_fast_dispatch(m))
|---msgr->ms_fast_dispatch(m)
|---for (list<Dispatcher*>::iterator p = fast_dispatchers.begin()
|---if ((*p)->ms_can_fast_dispatch(m))
|---(*p)->ms_fast_dispatch(m) // OSD::ms_fast_dispatch(Message *m)
|---post_dispatch(m, msize)
|---else
|---enqueue(m, priority, 0); // 加入队列AsyncMessenger类图
https://blog.csdn.net/w007d/article/details/88082912
Send IO
消息发送过程可以分为几个关键流程:
–s1–>AsyncMessenger::send_message(Message m)是Msg模块提供给上层提交IO请求的接口,IO请求封装在Message中。
–s2–>AsyncMessenger::submit_message()根据目标地址获取AsyncConnection对象,将Message传入该AsyncConnection对象中继续处理
–s3–>AsyncConnection::send_message(m)是IO请求在AsyncConnection实例中的入口,该函数主要将Message放在优先级队列AsyncConnection::out_q,并调用dispatch_event_external()将write_handler入队。
–s4–>当Worker线程又被唤醒并执行这个write_handler时,就会调用AsyncConnection::handle_write(),该函数主要是从out_q中依照优先级将一个Message出队,并通过AsyncConnection::write_message()把Mesage中的payload、middle、data都拷贝到AsyncConnection::outcoming_bl中,并调用AsyncConnection::_try_send()
–s5–>AsyncConnection::_try_send()作为Send IO在Async层的最后一个接口,主要是将outcoming_bl向下层传递,最终会到达RDMAStack,调用其中的RDMAConnectedSocketImpl::send()。
–s6–>RDMAStack内部会维持一个pending_bl,将RDMAConnectedSocketImpl::send()上层传入的outcoming_bl”接”在其后,调用的Chunk::write()启动发送
–s7–>ibv_post_send()是verbs中发送数据的接口,发送过程至此结束。
Receive IO
在RDMA协议中,收发完成(!=成功)接收消息首先会在CQ(Completion Queue)中放入CQE(CQ Entry)来通知上层有事件完成,verbs标准支持轮询和通知两种机制,Ceph RDMAStack使用的是轮询机制
–r1–>RDMADispatcher::polling线程不断的调用ibv_poll_cq()来轮询事件是否完成。
–r2–>如果发现一个底层读事件完成,就会通过conn = get_conn_lockless(response->qp_num)来获取其Connection对象,进而找到其关联的Worker和EventCenter,写EventCenter对象的notify_fd,由于该fd已经注册在file_events中,此举将唤醒Worker线程。
–r3–>EventCenter::Worker被唤醒后回调notify_fd的readcb,其中核心函数是AsyncConnection::process();
–r4–>AsyncConnection::process()线程会申请一块buffer用于接收收到的数据,这个buffer最终会被封装到bufferlist中并进一步被封装为Message供上层使用。
–r5–>AsyncConnection本身有一个读缓冲区:recv_buf,该buffer只给AsyncConnection::read_util()使用,until,顾名思义,就是该接口一定会读到想读取的长度,该接口首先试图从recv_buf中获取请求的数据,当recv_buf已有数据不能满足请求时,就要依情况从底层读取,对于recv_buf可以承载的数据长度,会调用底层接口先将recv_buf填满,再将从中读取所需;对于recv_buf不足的数据长度,直接从底层获取,从底层读取的接口是read_bulk()
–r6–>AsyncConnection::read_bulk()最终会带着传入的buffer,层层调用,直到RDMAStack中RDMAConnectedSocketImpl::read()–>Chunk::read()–>memcpy()将获取的数据填充到为Message准备号的buffer中
–r7–>AsyncConnection::process()经过层层调用已为Message的构造封装好了数据,接下来就只是构造一个Message,入dispatch_queue,交给上层处理。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列01:轻松3步本地部署deepseek,普通电脑可用
· 25岁的心里话
· 按钮权限的设计及实现