【ceph】ceph命令处理流程代码分析(终端敲命令之后发生的事)
目录
ceph 命令下发流程:命令行/usr/bin/ceph-->python 前端部分处理-->Admin Socket后端部分处理
后端部分 Admin Socket
https://blog.csdn.net/bandaoyu/article/details/123070446
前端部分 python
从命令行到python到C语言的过程
摘抄自:https://blog.csdn.net/SY_Yu/article/details/79131881
既然讲了admin_socket的的后台部分,那前端输入命令到底是怎么去调用的后台呢,或者前台的命令到底是怎么发送的呢?平时的ceph命令到底是怎么解析的呢?
在终端敲入了ceph stastus,终端就返回了集群的状态。那在这个过程中,到底是调用了什么。
主要涉及了
ceph-12.2.2\src\ceph.in
ceph-12.2.2\src\pybind\ceph_argparse.py
ceph-12.2.2\src\pybind\rados\rados.pyx
这里的pybind目录基本ceph所有的python脚本都在该目录下。
首先ceph命令都是由/usr/bin/ceph来执行,打开该文件发现内容与ceph.in相同,即这个脚本是由源码里面的ceph.in文件生成而来。
而在ceph.in中import了rados,
import rados
···
cluster_handle = run_in_thread(rados.Rados,name=name,
clustername=clustername,conf_defaults=conf_defaults,
conffile=conffile)
···json_command(cluster_handle, target=target, argdict=valid_dict,inbuf=inbuf)
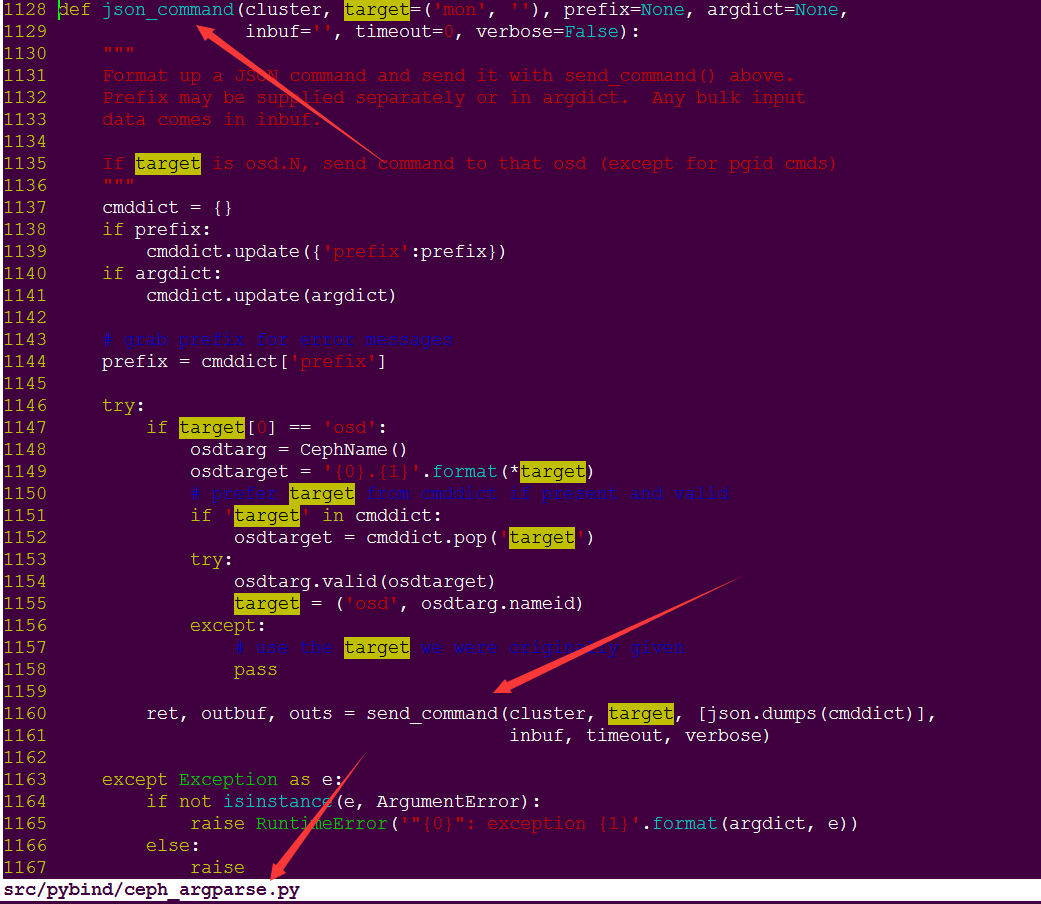
json_command在src\pybind\ceph_argparse.py中定义。
def json_command(cluster,
target: Optional[Tuple[str, str]] = ('mon', ''),
prefix: Optional[str] = None,
argdict: Optional[Dict[str, str]] = None,
inbuf: Optional[bytes] = b'',
timeout: Optional[int] = 0,
verbose: Optional[bool] = False) -> Tuple[int, bytes, str]:
……try:
……
ret, outbuf, outs = send_command_retry(cluster,
target, json.dumps(cmddict),
inbuf, timeout, verbose)
def send_command_retry(*args, **kwargs):
while True:
try:
return send_command(*args, **kwargs)
except Exception as e:
if ('get_command_descriptions' in str(e) and
'object in state configuring' in str(e)):
continue
else:
raise
def send_command(cluster, target=('mon', ''), cmd=None,
inbuf=b'', timeout=0,verbose=False):
···
if len(target) < 2 or target[1] == '':
ret, outbuf, outs = run_in_thread(cluster.mon_command,
cmd, inbuf, timeout)
else:
ret, outbuf, outs = run_in_thread(cluster.mon_command,
cmd, inbuf, timeout, target[1])
···
调用了src\pybind\rados\rados.pyx的rados类中的mon_command():cluster.mon_command
cdef class Rados(object):
"""This class wraps librados functions"""
# NOTE(sileht): attributes declared in .pyddef __init__(self, *args, **kwargs):
PyEval_InitThreads()
self.__setup(*args, **kwargs)
def mon_command(self, cmd, inbuf, timeout=0,
target=None):
···
def mon_command(self, cmd, inbuf, timeout=0, target=None):
……
try:
if target:
with nogil:
ret =rados_mon_command_target(self.cluster,
_target,<const char **>_cmd,
_cmdlen,<const char*>_inbuf,
_inbuf_len,&_outbuf, &_outbuf_len,
&_outs, &_outs_len)
else:
with nogil:
ret = rados_mon_command(self.cluster,
<const char **>_cmd, _cmdlen,
<const char*>_inbuf, _inbuf_len,
&_outbuf, &_outbuf_len,&_outs,
&_outs_len)
……
根据src\pybind\rados\rados.pyx文件中
cdef extern from "rados/librados.h" nogil:
····
int rados_mon_command(rados_t cluster, const char **cmd,
size_t cmdlen,const char *inbuf,
size_t inbuflen,char **outbuf,
size_t *outbuflen,char **outs,
size_t *outslen)
···
千辛万苦到了ceph的C++代码部分啦
这波骚操作令人窒息。笔者作为小菜鸡,第一次看通的时候也是长舒了一口气。
下面是常规操作。
librados.h
extern "C" int rados_mon_command(rados_t cluster,
const char **cmd,size_t cmdlen,
const char *inbuf,
size_t inbuflen,char **outbuf,
size_t *outbuflen,char **outs,
size_t *outslen)
{
tracepoint(librados, rados_mon_command_enter, cluster, cmdlen, inbuf, inbuflen);
librados::RadosClient *client = (librados::RadosClient*)cluster;
bufferlist inbl;
bufferlist outbl;
string outstring;
vector<string> cmdvec;for (size_t i = 0; i < cmdlen; i++) {
tracepoint(librados, rados_mon_command_cmd, cmd[i]);
cmdvec.push_back(cmd[i]);
}inbl.append(inbuf, inbuflen);
int ret = client->mon_command(cmdvec, inbl, &outbl, &outstring);do_out_buffer(outbl, outbuf, outbuflen);
do_out_buffer(outstring, outs, outslen);
tracepoint(librados, rados_mon_command_exit, ret, outbuf,
outbuflen, outs, outslen);
return ret;
}

在最新版本中mgr负责了一些诸如ceph osd df命令的解析。mgr承担了一部分原本由monitor来完成的事情
在下面的函数里也进行了对命令的处理
实例演示
摘抄自:https://blog.51cto.com/u_15127692/3915231
ceph -s是如何与ceph cluster进行交互的呢?
发送端:
命令行敲入ceph -s,执行/usr/bin/ceph, 传入参数-s
从该文件起初的导入部分可以得知:
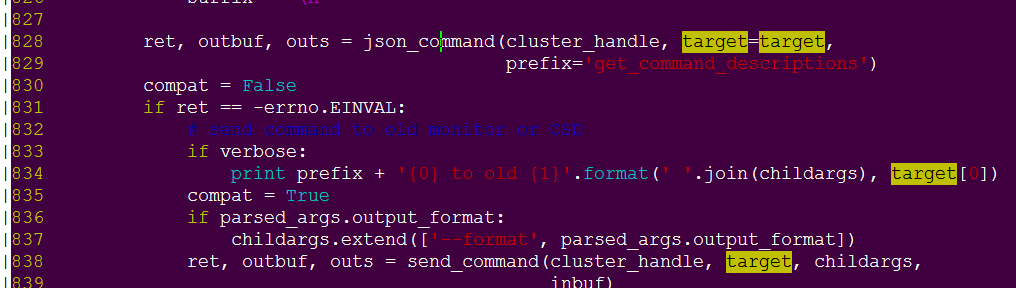
由send_command()去与ceph cluster通信:
| def send_command(cluster, target=('mon', ''), cmd=None, inbuf='', timeout=0, |
此时以给mon的指令为例,继续分析:
python 的 mon_command 里调用python 的 rados_mon_command_target()
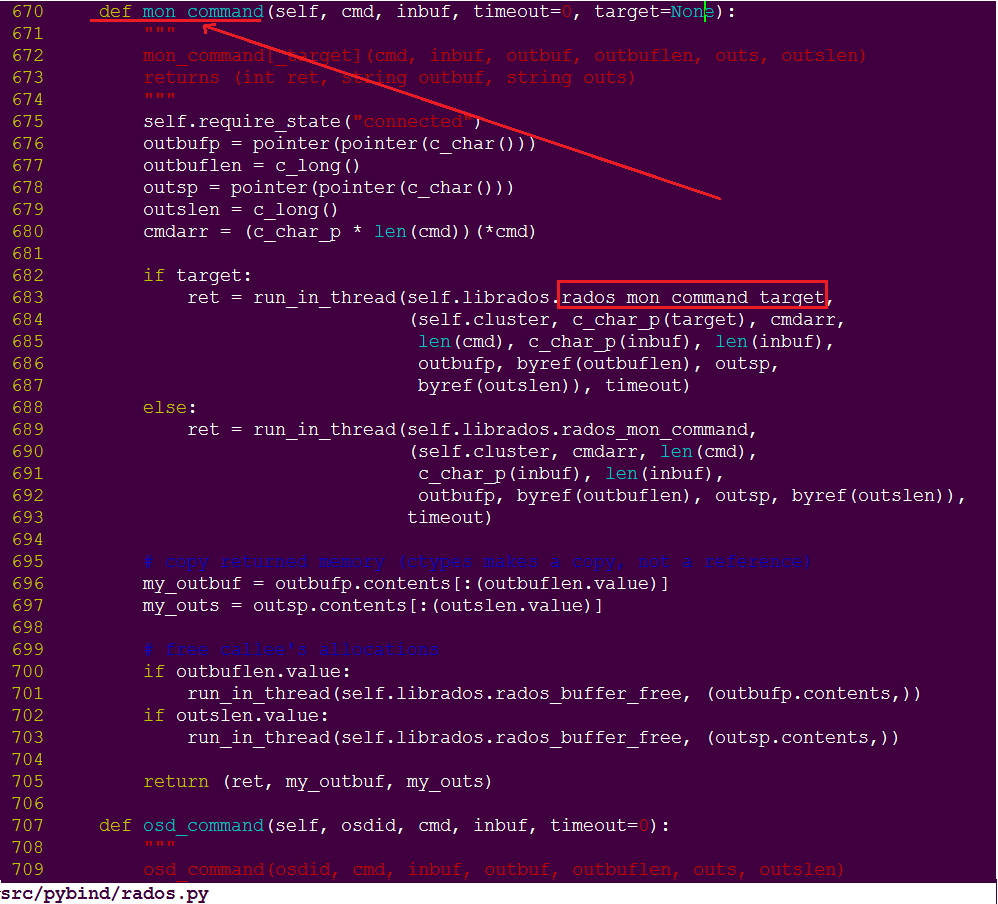
python 的rados_mon_command_target()里调用 C++的client->mon_command,client为librados::RadosClient;
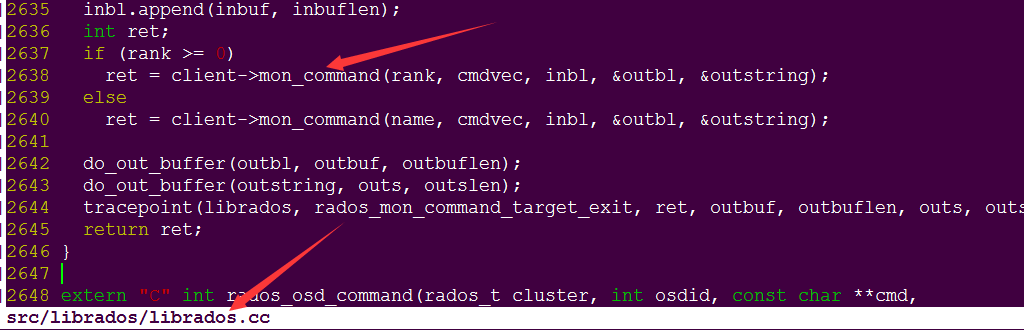
librados的client的mon_command()调用里调用start_mon_command
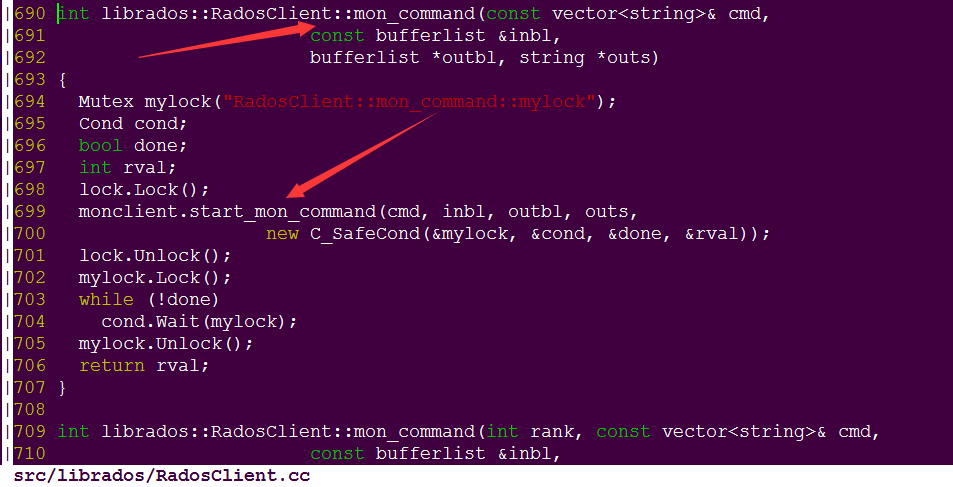
继续MonClient的start_mon_command():
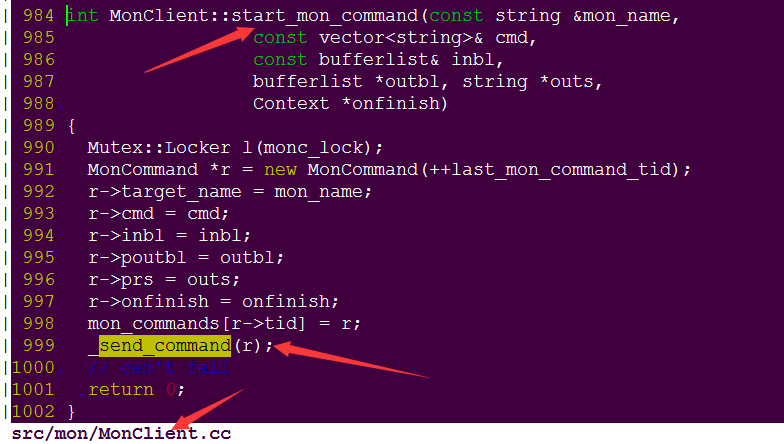
之后调用MonClient::_send_command()里面继续_send_mon_message(m),然后调用底层封装的socket发送消息;
接收端:
接来下来从mon端(即server端)入手,从接收到消息,解包开始:消息的tag为:MSG_MON_COMMAND,消息主体是一个结构体MMonCommand
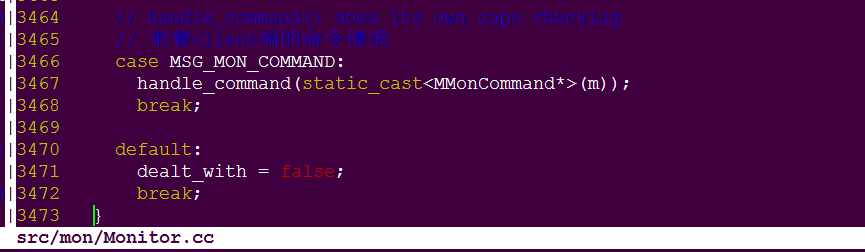
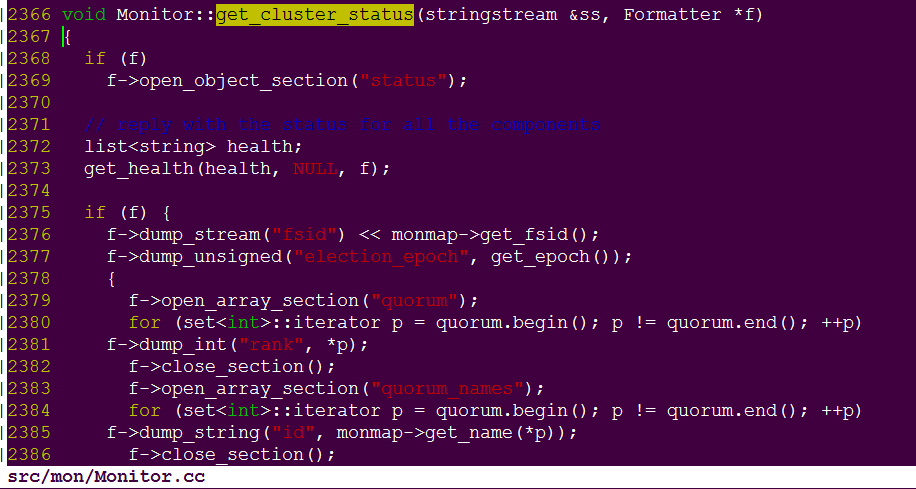
从mon/Monitor.cc中的handle_command函数入手,查询ceph cluster状态 get_cluster_status()函数:

继续跟get_cluster_status()函数: