对S7通信的连接的理解以及对比CAN通信协议来理解PLC通讯
对S7通信的连接的理解以及对比CAN通信协议来理解PLC通讯。
对功能块 SFB12 和 SFB13 的R_ID参数的理解 ?
对于同一个数据包。发送方与接收方的R_ID应该相同。
用下图解释
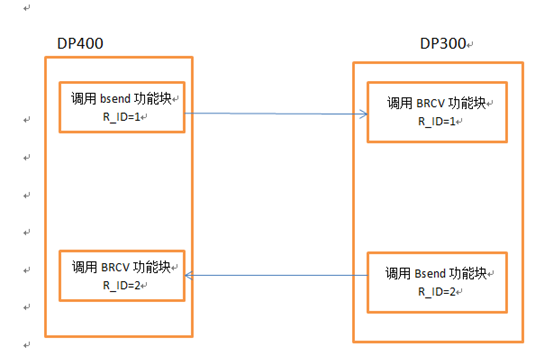
双向连接中
DP400可以充当主机 主动往DP300内写数据 或者主动将DP300中的数据读取出来。
DP300可以充当主机 主动往DP400 内写数据 或者主动将DP400中的数据读取出来。
双向连接中的两个机器中 均有通讯程序。
假设DP400调用SFB12 "Bsend"功能块 发送的是设定转矩控制字、该消息帧的R_ID=1 ,那么 DP300中调用 SFB13 "Brcv"功能块的R_ID
必须为1,才能接收到这个设定转矩控制字的消息帧。
DP300接收的数据帧 先放在接收缓冲区里面, 待DP300的主扫描程序使用该数据以后,读取以后将该缓冲区清零。
最起码51单片机配合SJA1000 CAN控制器 的接收 的主main()
程序是这样处理的, 当SJA1000接收到合适的消息帧以后,会请求51单片机中断,单片机中断将数据从接收缓冲区拷贝出来以后,在中断里面将接收缓冲区清空。
假设 DP300调用SFB12"Bsend"功能块,发送的是获取DP400的电压和电流控制指令。此数据帧的R_ID=2 那么DP400调用SFB13的"BRCV"功能块的R_ID必须为2,才能接收到这个指令 。
实际上 ,功能块SFB12"BSEND" 和功能块 "BRCV"都是 软件中驱动层的东西,是往数据区 写操作 或者 读操作 。至于具体的软件通讯协议。需要程序 根据 确定的数据区 里面的内容 再次细化程序。
例如
假设PLC 400中 有两个数据块 DB1 和 DB2
DB1里面的结构体数组ARAY[1..100]用来存放 400PLC中要发送的数据。
DB2里面的结构体数据ARAY[1..100]用来存放 400PLC中要接收的数据
通信伙伴PLC300 中也有两个数据块 DB1和DB2
DB1里面的结构体数组ARAY[1..100]用来存放 300PLC中要发送的数据。
DB2里面的结构体数据ARAY[1..100]用来存放 300PLC中要接收的数据
400和300的驱动层的通信 实际上就是 通过设置SFB12 SFB13 里面的R_ID 然后实现了 将
DP400PLC中的DB1的ARAY[]里面的内容复制到DP300PLC数据块DB2中的ARAY[] 里面 DP300PLC根据接收到DB2中ARAY[]中的内容再做进一步的程序处理。
问题2 既然有了R_ID 就是建立成功通讯成功的关键因素吗?
假设网络上有多个设备
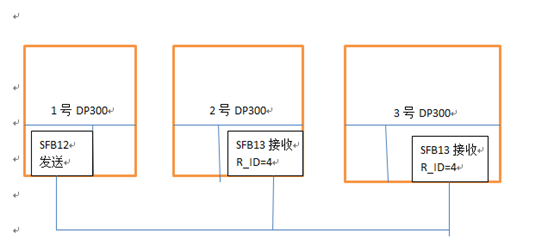
在上图中 假设1号DP300只想设定2号DP300的转速,根据上图3号DP300的也会接收,但是如果建立了S7接连。组态1号的DP300的连接号码为1 组态2号DP300的连接号码为1 组态3号DP300的连接号不是1 。
实际上,在调用SFB12 SFB13 本来就指定了连接号,这也是必要的,PLC的S7连接属于静态连接。
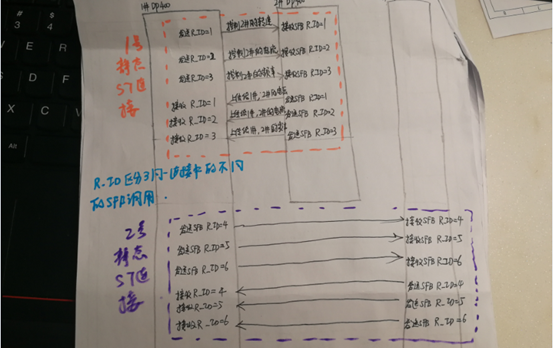
当然 还可以在OB1里面再编写几个SFB12 SFB13 通过不同的R_ID来确定不同的数据帧。

现在回到你的CAN总线的认识以及对比CAN通信 和PLC的S7通信
CAN发送的消息的数据帧包括29位ID号和8个字节的数据。CAN总线上的节点根据basican pelican 单滤波 还是双滤波 来决定是否接收该数据帧。
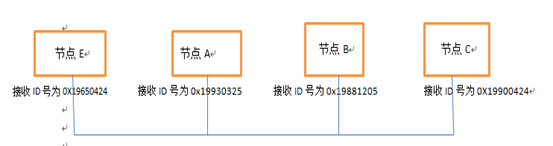
假设某一时刻 A节点发送给B节点一个数据帧 该数据帧的ID号为0X19881205
则只有B接收,若另外一个时刻 节点E在网络上发送一个数据帧,ID号为0x19881205 则还是B接收,但是B不知道是A发送给他的,还是E发送给他的,于是才有了Ican 协议。将29位ID进行分割,有源节点号,目标节点号,是响应帧还是命令帧。是否需要应答等等,此外还需要对通信进行优化, 即 先通信之前 首先要进行握手。建立连接。
例如节点A访问节点B 需要先建立连接,握手,然后在连接时间内,进行一问一答,如果在连接时间内,不应答,则退出连接。
每次从机在接收到一帧消息后都会重置连接时间 以重新倒计时,
以防止出现中断超时现象。
节点C访问节点B,则必须先与节点B建立连接。若此时节点B正在和节点A通讯,则节点B会给节点C发送连接中的状态。
上述的建立连接是一个动态的过程 是动态连接。
有一个特点:
对CAN接收节点来讲,只要接收到的消息的ID号码与自己滤波器设置的一样,就会接收到消息,对于51单片机和CAN控制器SJA1000编写的程序,每次SJA1000接收到正确的数据以后,都会对51单片机产生中断,51单片机响应中断以后,必须用指令清空缓冲区。
由于51单片机和SJA1000组成的系统,SJA1000 CAN接收区只有一个13字节的缓冲区,(刚好是一个字节帧信息,4个字节帧ID
8个字节数据)。相当于只有一个邮箱,那么某一时刻只能有一个连接。当该连接结束以后,才能启动另外一个连接。
像DSP2812这样的32位处理器,它有32个邮箱,每个邮箱有13个字节,那么理论上它可以建立32个连接。
假设用DSP2812作为整车控制器,用1号邮箱接收电机控制器上传的状态,用2号邮箱作为接收电池BMS控制系统上传的状态,用3号邮箱作为接收仪表盘上传的数据, 相当于建立了多个静态连接,
最后在整车控制器(CPU为DSP2812)里面的程序顺序的读取1号邮箱 2号邮箱 3号邮箱 上传的数据就可以了, 现在回归到PLC里面。 实际上的连接号 就规定了 通信的两个对象和,例如下图中的1号连接就是1号DP400 与2号DP400 的通信。
2号静态连接 就是1号DP400与3号DP400的通信。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号