UVA12304 2D Geometry 110 in 1!
题意
分析
三角形的外接圆
维基百科上给出了计算公式,可以解方程推。

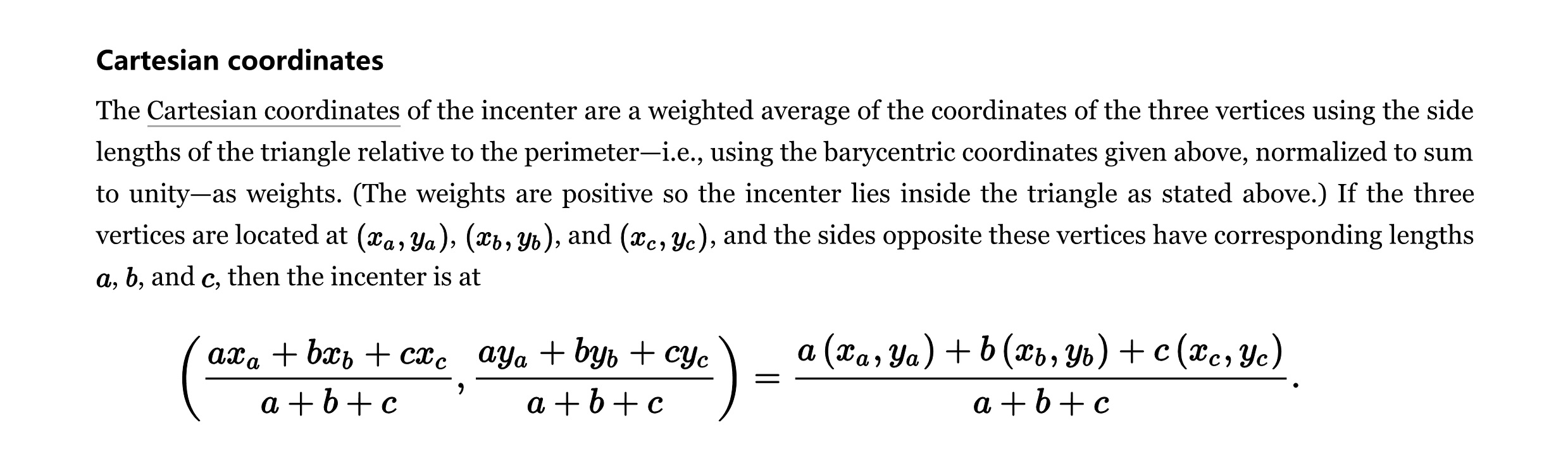
三角形的内切圆
维基百科上也给出了现成的公式,照样是可以推的。
后三个操作
都可以转化为直线、圆之间的交点问题。
时间复杂度\(O(T)\)
精度问题
对于第四个操作,如果不改现有的代码,精度必须调整至\(10^{-6}\)。
要改的话可以特判直线与圆相切,求出对精确度要求很高的那个点。
代码
这大概是我写过的除数据结构题之外最长的代码了。
#include<iostream>
#include<cstdio>
#include<cstdlib>
#include<cmath>
#include<set>
#include<map>
#include<queue>
#include<stack>
#include<algorithm>
#include<bitset>
#include<cassert>
#include<ctime>
#include<cstring>
#define rg register
#define il inline
#define co const
template<class T>il T read()
{
rg T data=0;
rg int w=1;
rg char ch=getchar();
while(!isdigit(ch))
{
if(ch=='-')
w=-1;
ch=getchar();
}
while(isdigit(ch))
{
data=data*10+ch-'0';
ch=getchar();
}
return data*w;
}
template<class T>T read(T&x)
{
return x=read<T>();
}
using namespace std;
typedef long long ll;
co double eps=1e-6;
int dcmp(double x)
{
if(fabs(x)<eps)
return 0;
else
return x<0?-1:1;
}
struct Point
{
double x,y;
Point(double x=0,double y=0)
:x(x),y(y){}
bool operator<(co Point&rhs)co // edit 1
{
return dcmp(x-rhs.x)?x<rhs.x:y<rhs.y;
}
bool operator==(co Point&rhs)co
{
return dcmp(x-rhs.x)==0&&dcmp(y-rhs.y)==0;
}
double angle()
{
return atan2(y,x);
}
};
typedef Point Vector;
Vector operator+(Vector A,Vector B)
{
return Vector(A.x+B.x,A.y+B.y);
}
Vector operator-(Point A,Point B)
{
return Vector(A.x-B.x,A.y-B.y);
}
Vector operator*(Vector A,double p)
{
return Vector(A.x*p,A.y*p);
}
Vector operator/(Vector A,double p)
{
return Vector(A.x/p,A.y/p);
}
double Dot(Vector A,Vector B)
{
return A.x*B.x+A.y*B.y;
}
double Length(Vector A)
{
return sqrt(Dot(A,A));
}
double Angle(Vector A,Vector B)
{
return acos(Dot(A,B)/Length(A)/Length(B));
}
double Cross(Vector A,Vector B)
{
return A.x*B.y-A.y*B.x;
}
double Area2(Point A,Point B,Point C)
{
return Cross(B-A,C-A);
}
Vector Rotate(Vector A,double rad)
{
return Vector(A.x*cos(rad)-A.y*sin(rad),A.x*sin(rad)+A.y*cos(rad));
}
Vector Normal(Vector A)
{
double L=Length(A);
return Vector(-A.y/L,A.x/L);
}
Point LineLineIntersection(Point P,Vector v,Point Q,Vector w)
{
Vector u=P-Q;
double t=Cross(w,u)/Cross(v,w);
return P+v*t;
}
double DistanceToLine(Point P,Point A,Point B)
{
Vector v1=B-A,v2=P-A;
return fabs(Cross(v1,v2))/Length(v1);
}
double DistanceToSegment(Point P,Point A,Point B)
{
if(A==B)
return Length(P-A);
Vector v1=B-A,v2=P-A,v3=P-B;
if(dcmp(Dot(v1,v2))<0)
return Length(v2);
if(dcmp(Dot(v1,v3))>0)
return Length(v3);
return DistanceToLine(P,A,B);
}
Point PointLineProjection(Point P,Point A,Point B)
{
Vector v=B-A;
return A+v*(Dot(v,P-A)/Dot(v,v));
}
bool SegmentProperIntersection(Point a1,Point a2,Point b1,Point b2)
{
double c1=Cross(a2-a1,b1-a1),c2=Cross(a2-a1,b2-a1),
c3=Cross(b2-b1,a1-b1),c4=Cross(b2-b1,a2-b1);
return dcmp(c1)*dcmp(c2)<0&&dcmp(c3)*dcmp(c4)<0;
}
bool OnSegment(Point p,Point a1,Point a2)
{
return dcmp(Cross(a1-p,a2-p))==0&&dcmp(Dot(a1-p,a2-p))<0;
}
double PolygonArea(Point*p,int n)
{
double area=0;
for(int i=1;i<n-1;++i)
area+=Cross(p[i]-p[0],p[i+1]-p[0]);
return area/2;
}
struct Line
{
Point p;
Vector v;
Line(Point p=0,Vector v=0)
:p(p),v(v){}
Line(double x1,double y1,double x2,double y2)
{
Point p1(x1,y1);
Point p2(x2,y2);
p=p1;
v=p2-p1;
}
Point point(double t)
{
return p+v*t;
}
Line move(double d)
{
return Line(p+Normal(v)*d,v);
}
};
struct Circle
{
Point c;
double r;
Circle(Point c=0,double r=0)
:c(c),r(r){}
Point point(double a)
{
return Point(c.x+cos(a)*r,c.y+sin(a)*r);
}
};
int LineCircleIntersection(Line L,Circle C,double&t1,double&t2,vector<Point>&sol)
{
double a=L.v.x,b=L.p.x-C.c.x,c=L.v.y,d=L.p.y-C.c.y;
double e=a*a+c*c,f=2*(a*b+c*d),g=b*b+d*d-C.r*C.r;
double delta=f*f-4*e*g;
if(dcmp(delta)<0)
return 0;
if(dcmp(delta)==0)
{
t1=t2=-f/(2*e);
sol.push_back(L.point(t1));
return 1;
}
t1=(-f-sqrt(delta))/(2*e);
t2=(-f+sqrt(delta))/(2*e);
sol.push_back(L.point(t1));
sol.push_back(L.point(t2));
return 2;
}
int CircleCircleIntersection(Circle C1,Circle C2,vector<Point>&sol)
{
double d=Length(C1.c-C2.c);
if(dcmp(d)==0)
{
if(dcmp(C1.r-C2.r)==0)
return -1;
return 0;
}
if(dcmp(C1.r+C2.r-d)<0)
return 0;
if(dcmp(fabs(C1.r-C2.r)-d)>0)
return 0;
double a=(C2.c-C1.c).angle();
double da=acos((C1.r*C1.r+d*d-C2.r*C2.r)/(2*C1.r*d));
Point p1=C1.point(a-da),p2=C1.point(a+da);
sol.push_back(p1);
if(p1==p2)
return 1;
sol.push_back(p2);
return 2;
}
co double PI=acos(-1);
int PointCircleTangent(Point p,Circle C,vector<Vector>&sol)
{
Vector u=C.c-p;
double dist=Length(u);
if(dcmp(dist-C.r)<0)
return 0;
if(dcmp(dist-C.r)==0)
{
sol.push_back(Rotate(u,PI/2));
return 1;
}
double ang=asin(C.r/dist);
sol.push_back(Rotate(u,-ang));
sol.push_back(Rotate(u,ang));
return 2;
}
int CircleCircleTangent(Circle A,Circle B,vector<pair<Point,Point> >&sol)
{
int cnt=0;
if(dcmp(A.r-B.r)<0) // notice the result here
swap(A,B);
double d=Length(A.c-B.c);
double rdiff=A.r-B.r;
double rsum=A.r+B.r;
if(dcmp(d-rdiff)<0)
return 0;
double base=(B.c-A.c).angle();
if(dcmp(d)==0&&dcmp(A.r-B.r)==0)
return -1;
if(dcmp(d-rdiff)==0)
{
sol.push_back(make_pair(A.point(base),B.point(base)));
++cnt;
return 1;
}
double ang=acos((A.r-B.r)/d);
sol.push_back(make_pair(A.point(base+ang),B.point(base+ang)));
++cnt;
sol.push_back(make_pair(A.point(base-ang),B.point(base-ang)));
++cnt;
if(dcmp(d-rsum)==0)
{
sol.push_back(make_pair(A.point(base),B.point(base+PI)));
++cnt;
}
else if(dcmp(d-rsum)>0)
{
double ang=acos((A.r+B.r)/d);
sol.push_back(make_pair(A.point(base+ang),B.point(base+ang+PI)));
++cnt;
sol.push_back(make_pair(A.point(base-ang),B.point(base-ang+PI)));
++cnt;
}
return cnt;
}
// Problem 1
Circle CircumscribedCircle(Point p1,Point p2,Point p3)
{
double Bx=p2.x-p1.x,By=p2.y-p1.y;
double Cx=p3.x-p1.x,Cy=p3.y-p1.y;
double D=2*(Bx*Cy-By*Cx);
double cx=(Cy*(Bx*Bx+By*By)-By*(Cx*Cx+Cy*Cy))/D+p1.x;
double cy=(Bx*(Cx*Cx+Cy*Cy)-Cx*(Bx*Bx+By*By))/D+p1.y;
Point p=Point(cx,cy);
return Circle(p,Length(p1-p));
}
// Problem 2
Circle InscribedCircle(Point p1,Point p2,Point p3)
{
double a=Length(p2-p3);
double b=Length(p3-p1);
double c=Length(p1-p2);
Point p=(p1*a+p2*b+p3*c)/(a+b+c);
return Circle(p,DistanceToLine(p,p1,p2));
}
// Problem 3
// PointCircleTangent()
// Problem 4
vector<Point> CircleThroughPointTangentToLine(Point p,Line L,double r)
{ // require precision to be adjusted to 1e-6 here
vector<Point>ans;
double t1,t2;
LineCircleIntersection(L.move(-r),Circle(p,r),t1,t2,ans);
LineCircleIntersection(L.move(r),Circle(p,r),t1,t2,ans);
return ans;
}
// Problem 5
vector<Point> CircleTangentToLine(Line a,Line b,double r)
{
vector<Point>ans;
Line L1=a.move(-r),L2=a.move(r);
Line L3=b.move(-r),L4=b.move(r);
ans.push_back(LineLineIntersection(L1.p,L1.v,L3.p,L3.v));
ans.push_back(LineLineIntersection(L1.p,L1.v,L4.p,L4.v));
ans.push_back(LineLineIntersection(L2.p,L2.v,L3.p,L3.v));
ans.push_back(LineLineIntersection(L2.p,L2.v,L4.p,L4.v));
return ans;
}
// Problem 6
vector<Point> CircleTangentToCircle(Circle c1,Circle c2,double r)
{
vector<Point>ans;
Vector v=c2.c-c1.c;
double dist=Length(v);
if(dcmp(dist-c1.r-c2.r-r*2)>0)
return ans;
CircleCircleIntersection(Circle(c1.c,c1.r+r),Circle(c2.c,c2.r+r),ans);
return ans;
}
// Format
double LineAngleDegree(Vector v)
{
double ang=v.angle()*180/PI;
while(dcmp(ang)<0)
ang+=360;
while(dcmp(ang-180)>=0)
ang-=180;
return ang;
}
void format(Circle c)
{
printf("(%lf,%lf,%lf)\n",c.c.x,c.c.y,c.r);
}
void format(vector<double> ans)
{
int n=ans.size();
sort(ans.begin(),ans.end());
printf("[");
if(n)
{
printf("%lf",ans[0]);
for(int i=1;i<n;++i)
printf(",%lf",ans[i]);
}
printf("]\n");
}
void format(vector<Point> ans)
{
int n=ans.size();
sort(ans.begin(),ans.end());
printf("[");
if(n)
{
printf("(%lf,%lf)",ans[0].x,ans[0].y);
for(int i=1;i<n;++i)
printf(",(%lf,%lf)",ans[i].x,ans[i].y);
}
printf("]\n");
}
int main()
{
// freopen(".in","r",stdin);
// freopen(".out","w",stdout);
string cmd;
double x1,y1,x2,y2,x3,y3,x4,y4,xp,yp,xc,yc,r1,r2,r;
while(cin>>cmd)
{
if(cmd=="CircumscribedCircle")
{
cin>>x1>>y1>>x2>>y2>>x3>>y3;
format(CircumscribedCircle(Point(x1,y1),Point(x2,y2),Point(x3,y3)));
}
else if(cmd=="InscribedCircle")
{
cin>>x1>>y1>>x2>>y2>>x3>>y3;
format(InscribedCircle(Point(x1,y1),Point(x2,y2),Point(x3,y3)));
}
else if(cmd=="TangentLineThroughPoint")
{
cin>>xc>>yc>>r>>xp>>yp;
vector<Vector>sol;
vector<double>ans;
int cnt=PointCircleTangent(Point(xp,yp),Circle(Point(xc,yc),r),sol);
for(int i=0;i<cnt;++i)
ans.push_back(LineAngleDegree(sol[i]));
format(ans);
}
// CircleThroughAPointAndTangentToALineWithRadius 75 190 75 190 185 65 100
else if(cmd=="CircleThroughAPointAndTangentToALineWithRadius")
{
cin>>xp>>yp>>x1>>y1>>x2>>y2>>r;
format(CircleThroughPointTangentToLine(Point(xp,yp),Line(x1,y1,x2,y2),r));
}
else if(cmd=="CircleTangentToTwoLinesWithRadius")
{
cin>>x1>>y1>>x2>>y2>>x3>>y3>>x4>>y4>>r;
format(CircleTangentToLine(Line(x1,y1,x2,y2),Line(x3,y3,x4,y4),r));
}
else if(cmd=="CircleTangentToTwoDisjointCirclesWithRadius")
{
cin>>x1>>y1>>r1>>x2>>y2>>r2>>r;
format(CircleTangentToCircle(Circle(Point(x1,y1),r1),Circle(Point(x2,y2),r2),r));
}
}
return 0;
}
静渊以有谋,疏通而知事。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号