单目测距的基本介绍和实现原理
单目测距的基本介绍和实现原理
单目测距是一种常用的测量技术,它通过单个摄像头来测量物体与摄像头的距离。在现代科技的推动下,单目测距术正在不断发展和应用于各个领域。本文将分点阐述关于单目测距的重要性、原理和方法、应用领域以及潜在的挑战和发展方向
结尾附赠非常宝贵的自动驾驶学习资料
一、单目测距的重要性
准确测量物体与摄像头的距离对于很多应用非常关键,比如智能驾驶、人脸识别、增强现实等。在智能驾驶中,通过单目测距可以判断车辆与前方障碍物的距离,从而实现智能制动和避让。在人脸识别中,单目测距可以帮助确定人脸的大小和位置,提高人脸识别的准确性。在增强现实中,单目测距可以用来精确定位虚拟物体,使虚拟内容与真实世界更加融合
二、单目测距的原理和方法
单目测距主要依靠图像中物体的几何信息来进行距离估计。常用的方法包括三角测量法、景深测量法和结构光测量法。三角测量法基于物体在图像中的尺寸和位置信息,结合相机的内外参数进行距离估计。景深测量法利用图像中物体的模糊程度来反映物体的远近关系,通过对焦距离的调整来估计距离。结构光测量法则利用投影仪投射特定的光纹到物体上,通过获取投影图像和物体表面的形变信息来计算距离。
三、单目测距的应用领域
单目测距技术在各个领域都有广泛的应用。在工业制造中,单目测距可以用来测量零件的尺寸和位置,实现自动化生产。在医疗领域,单目测距可以用来测量病人的身高和体重,辅助诊断和治疗。在军事领域,单目测距可以用来判断目标距离和大小,指导射击和侦察任务。在消费电子产品中,单目测距可以用来实现手势控制和虚拟现实交互。
四、单目测距的潜在挑战和发展方向
尽管单目测距技术已经取得了很大的进展,但仍然存在一些挑战。例如,环境光线的变化、物体表面的反射性和复杂场景的处理等都会对测距结果产生影响。为了解决这些问题,需要进一步改进算法和传感器技术,提高测量的准确性和鲁棒性。此外,随着人工智能和深度学习的发展,将其与单目测距相结合也是一个发展方向,可以通过学习来提高测距的性能。
综上所述,单目测距是一种重要的测量技术,具有广泛的应用前景。随着计算机视觉和人工智能技术的不断发展,单目测距技术还有很大的发展空间和潜力。未来可能会出现更加先进的算法和传感器技术,可以实现更高精度和更快速的测量。此外,单目测距技术的应用领域也将不断扩大,涉及到更多的行业和领域。
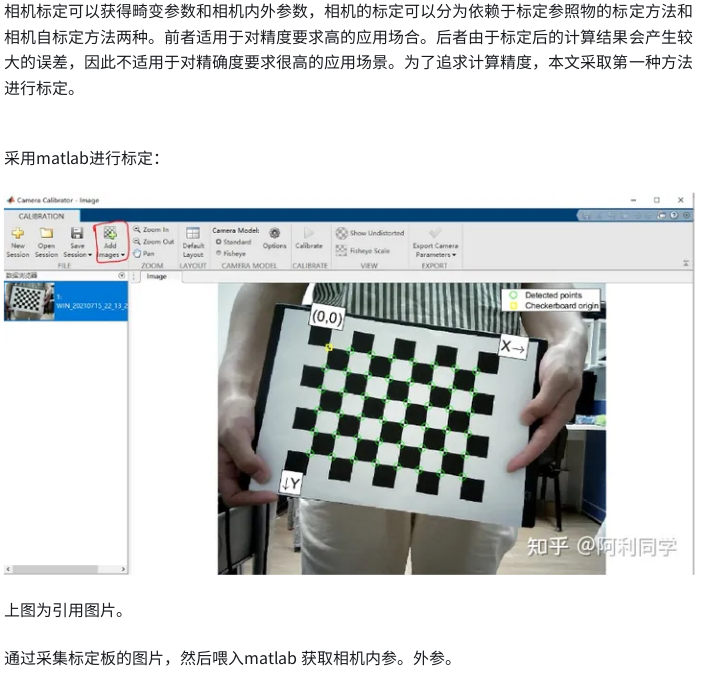
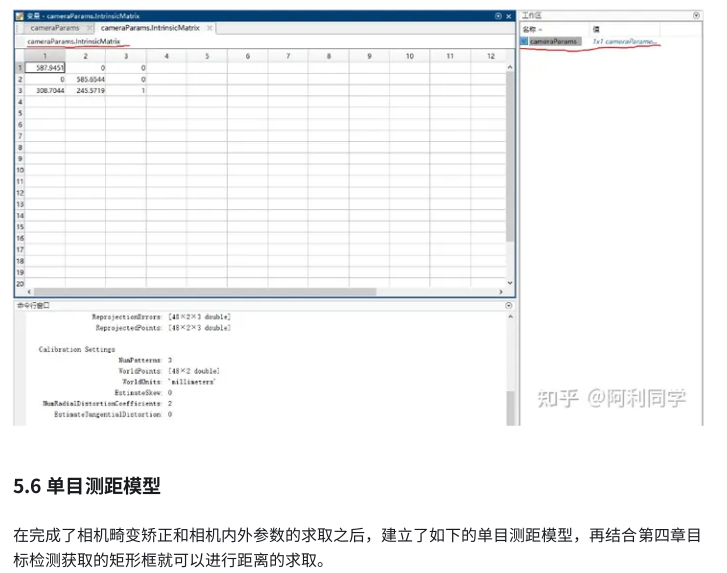
五、单目测距实现
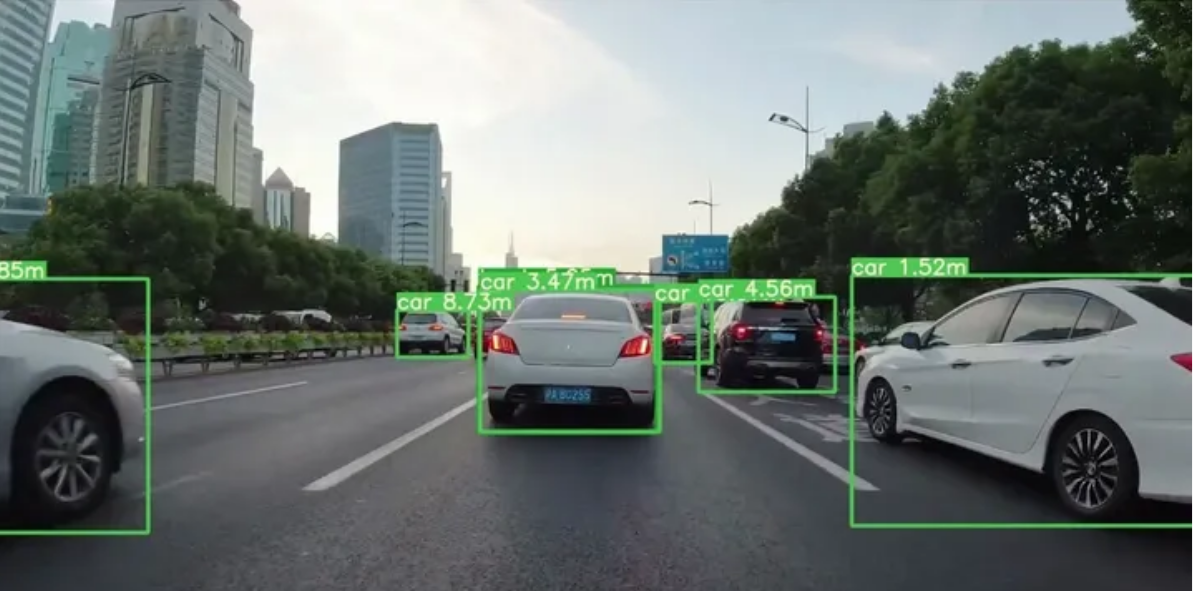
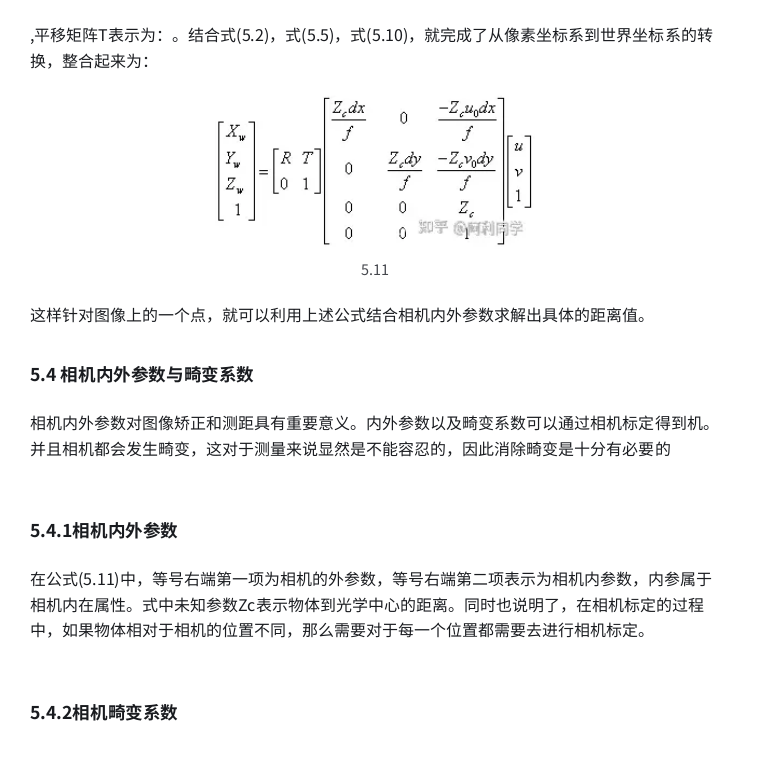
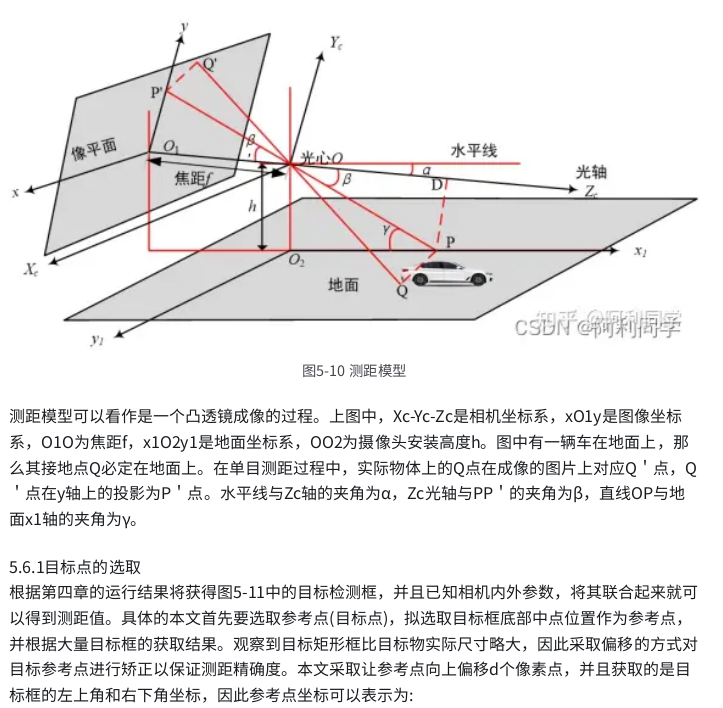
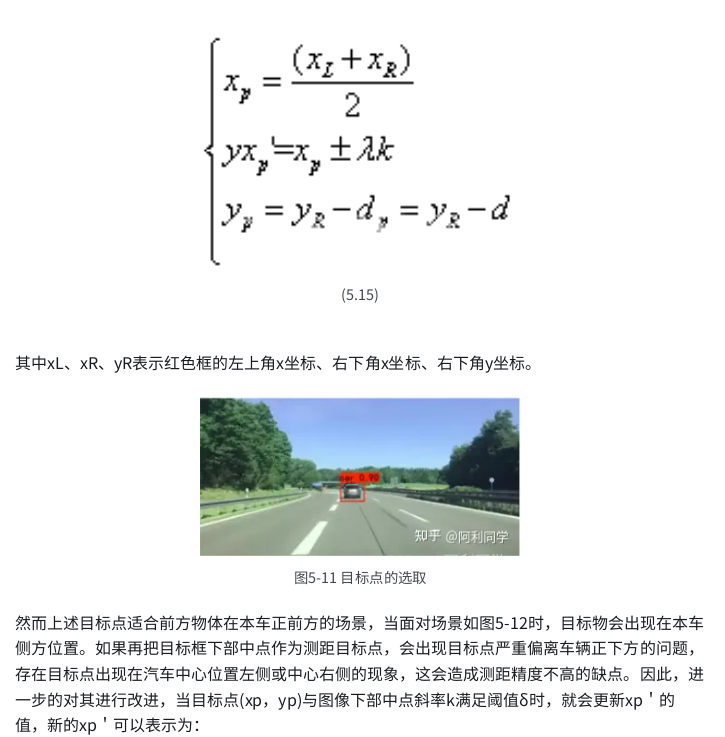
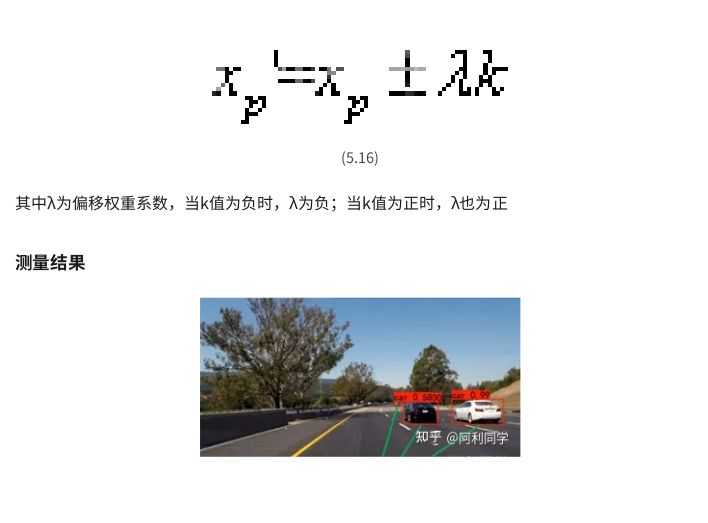
实时感知本车周围物体的距离对高级驾驶辅助系统具有重要意义,当判定物体与本车距离小于安全距离时便采取主动刹车等安全辅助功能,这将进一步提升汽车的安全性能并减少碰撞的发生。上一章本文完成了目标检测任务,接下来需要对检测出来的物体进行距离测量。首先描述并分析了相机成像模型,推导了图像的像素坐标系与世界坐标系之间的关系。其次,利用软件标定来获取相机内外参数并改进了测距目标点的选取。最后利用测距模型完成距离的测量并对采集到的图像进行仿真分析和方法验证。
5.1 单目视觉测距和双目视觉测距相比
测距在智能驾驶的应用中发挥着重要作用。测距方法主要包含两类:主动测距与被动测距,主动测
距是当前研究的热点内容之一。主动测距方法包括采用传感器、摄像机、激光雷达等车载设备进行
测距。摄像头由于价格相对低廉且性能稳定应用较为广泛,本文采用摄像头进行距离测量。
单目测距主要运用测距模型结合目标矩形框来进行测距任务,通过目标在图像中的大小位置信息去
估算距离。单目测距算法具有计算量小、成本低廉的优点,并且测距误差也可以通过后续的调校来
消除,很多算法都在采用基于单目视觉传感器来开发产品。 因此相对其他测距方法,单目视觉有更
成熟的算法,本文亦采用单目视觉测距。
利用双目视觉可以获取同一物体在成像平面上的像素偏移量。然后可以使用相机焦距、像素偏移以
及两个相机之间的实际距离从数学上得出对象之间的距离。与单目测距相比,双目测距虽然更加精
确,不需要数据集,但计算量大,速度相对较慢,而且由于使用了两个摄像头,成本也变得更高。
5.2 相机成像模型
想要得到距离信息需要获得三维真实世界里的点,而由于处理的对像是摄像头捕捉后的二维平面图像,因此如何将二维图像上的某个点转换为三维世界里的点是值得考虑的问题。进一步的,把图像上的点转换到真实世界的点,就需要进行像素坐标系、图像坐标系、相机坐标系以及世界坐标系之间的相互转换。四种坐标系之间的相互关系如图5-1所示。坐标系描述如下:
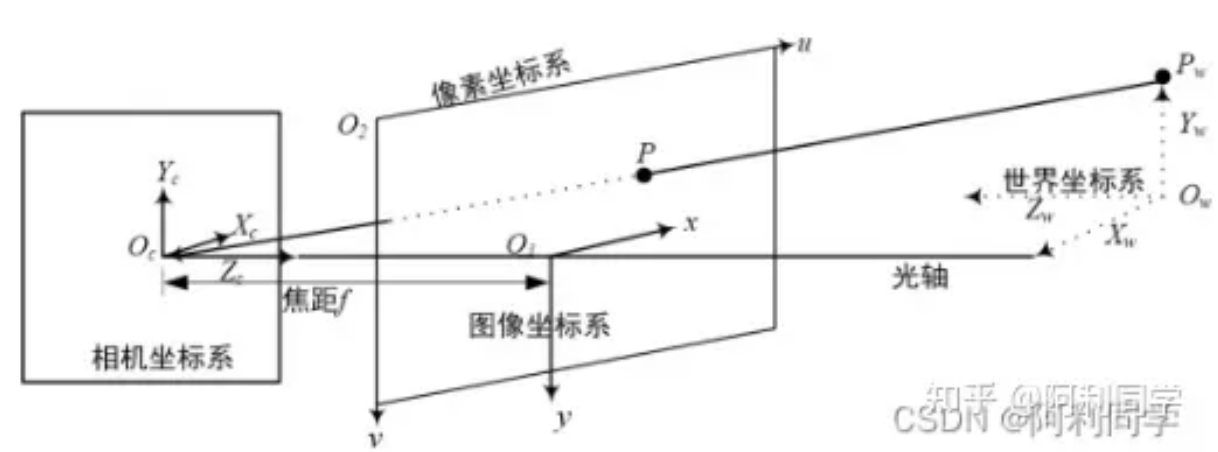
(1)像素坐标系。数字图像一般是三维图像并且由众多像素点组合而成的,像素坐标系的原点为
O2,以宽度方向为u轴,以高度方向为v轴。
(2)图像坐标系。图像坐标原点为O1,并且像素坐标系和图像坐标系是平行的,以图像宽度方向为x
轴,以高度方向为y轴,长度单位为mm。
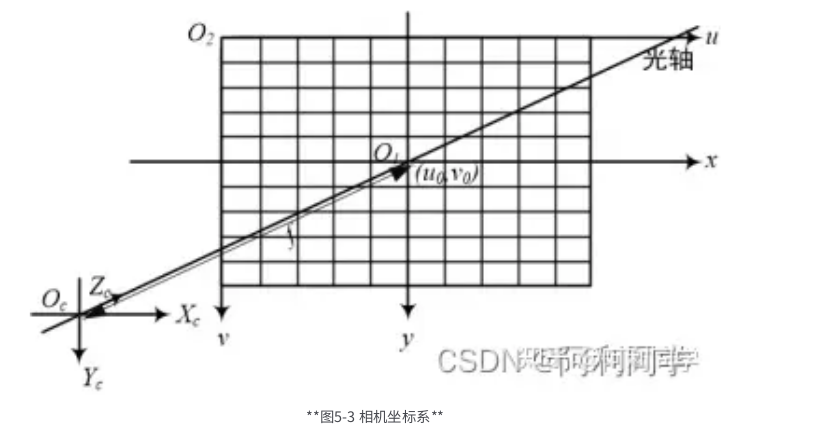
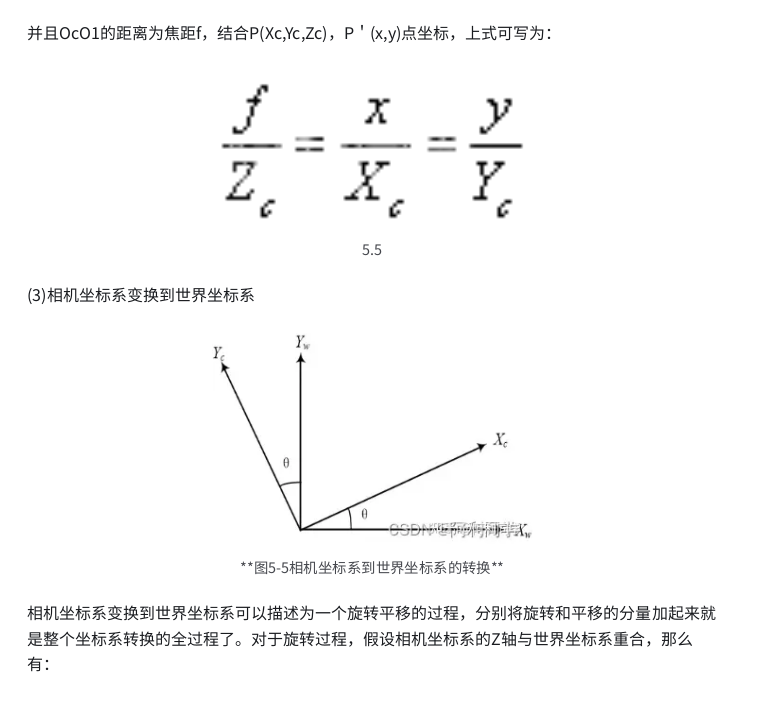
(3)相机坐标系。相机坐标系原点Oc,Xc轴、Yc轴分别是与图像坐标系下的x轴、y轴相互平行,相机Zc轴和摄像头光轴重合。
(4)世界坐标系。我们所处的环境即是在世界坐标系之下,也就是图5-1中Xw-Yw-Zw平面。Pw通过
真实世界上的一点至图像上的P点,完成从世界坐标到图像上坐标的转换。
5.3 坐标系转换
(1)像素坐标系转换到图像坐标系
像素坐标系是以像素来表示各个像素位置信息的,但是它不能够表达出图像中物体的物理大小,因此需要进行坐标系之间的转换。
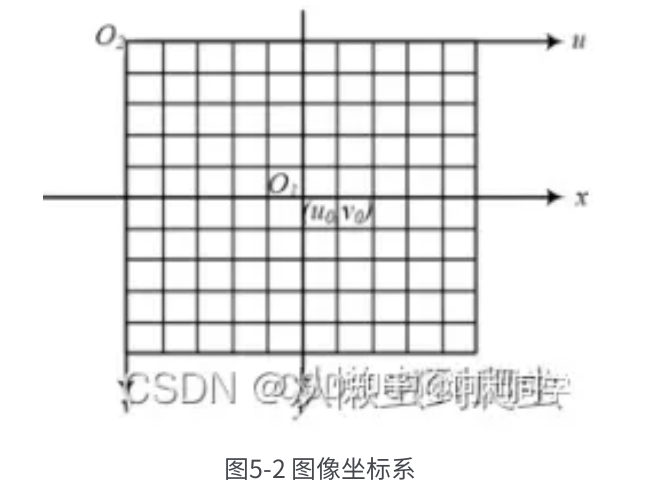
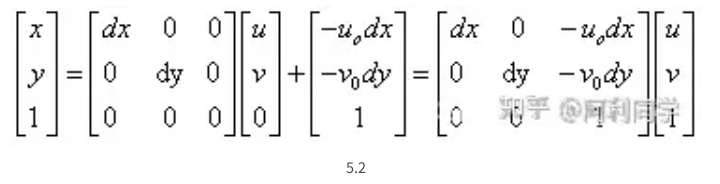
在图5-2中,图像坐标系的坐标(x,y)与像素坐标系的坐标(u,v)之间的关系可以表示为:
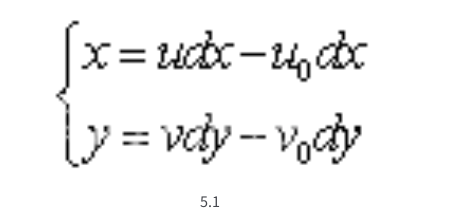
式 (5.1)中,(u0,v0)是图像中心的像素坐标,dx、dy分别是横向和纵向像素在感光板上的单位物理长度。
写成齐次坐标矩阵的形式为:
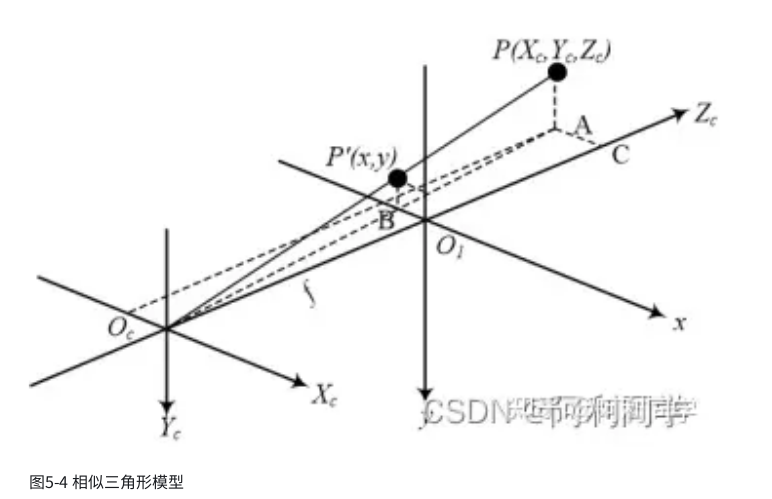
(2)图像坐标系变换到相机坐标系
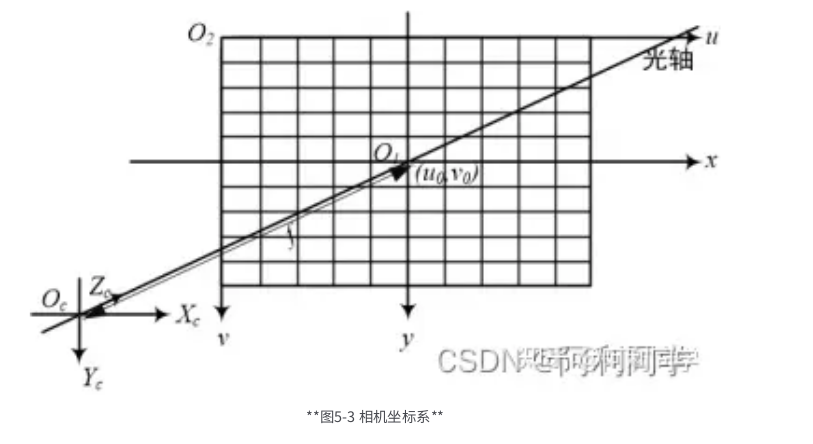
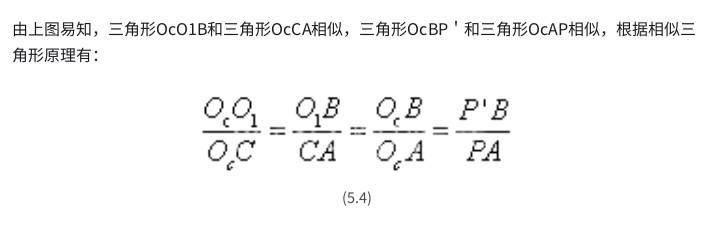
在图5-3中,OcO1之间的距离为焦距f。图5-4表示了物体成像到图像坐标系的过程,P点、 P'点
分别为相机坐标系和图像坐标系下的坐标。




 浙公网安备 33010602011771号
浙公网安备 33010602011771号