图像理解之图像分割 image segmentation
0000,标注工具
https://blog.csdn.net/chaipp0607/article/details/79036312
0001,概述
太优秀了,收藏用!转载自:https://www.cnblogs.com/Jie-Liang/archive/2017/06/29/6902375.html
综述论文翻译:A Review on Deep Learning Techniques Applied to Semantic Segmentation
近期主要在学习语义分割相关方法,计划将arXiv上的这篇综述好好翻译下,目前已完成了一部分,但仅仅是尊重原文的直译,后续将继续完成剩余的部分,并对文中提及的多个方法给出自己的理解。
论文地址:https://arxiv.org/abs/1704.06857
应用于语义分割问题的深度学习技术综述
摘要
计算机视觉与机器学习研究者对图像语义分割问题越来越感兴趣。越来越多的应用场景需要精确且高效的分割技术,如自动驾驶、室内导航、甚至虚拟现实与增强现实等。这个需求与视觉相关的各个领域及应用场景下的深度学习技术的发展相符合,包括语义分割及场景理解等。这篇论文回顾了各种应用场景下利用深度学习技术解决语义分割问题的情况:首先,我们引入了领域相关的术语及必要的背景知识;然后,我们介绍了主要的数据集以及对应的挑战,帮助研究者选取真正适合他们问题需要及目标的数据集;接下来,我们介绍了现有的方法,突出了各自的贡献以及对本领域的积极影响;最后,我们展示了大量的针对所述方法及数据集的实验结果,同时对其进行了分析;我们还指出了一系列的未来工作的发展方向,并给出了我们对于目前最优的应用深度学习技术解决语义分割问题的研究结论。
1 引言
如今,语义分割(应用于静态2D图像、视频甚至3D数据、体数据)是计算机视觉的关键问题之一。在宏观意义上来说,语义分割是为场景理解铺平了道路的一种高层任务。作为计算机视觉的核心问题,场景理解的重要性越来越突出,因为现实中越来越多的应用场景需要从影像中推理出相关的知识或语义(即由具体到抽象的过程)。这些应用包括自动驾驶[1,2,3],人机交互[4],计算摄影学[5],图像搜索引擎[6],增强现实等。应用各种传统的计算机视觉和机器学习技术,这些问题已经得到了解决。虽然这些方法很流行,但深度学习革命让相关领域发生了翻天覆地的变化,因此,包括语义分割在内的许多计算机视觉问题都开始使用深度架构来解决,通常是卷积神经网络CNN[7-11],而CNN在准确率甚至效率上都远远超过了传统方法。然而,相比于固有的计算机视觉及机器学习分支,深度学习还远不成熟。也因此,还没有一个统一的工作及对于目前最优方法的综述。该领域的飞速发展使得对初学者的启蒙教育比较困难,而且,由于大量的工作相继被提出,要跟上发展的步伐也非常耗时。于是,追随语义分割相关工作、合理地解释它们的论点、过滤掉低水平的工作以及验证相关实验结果等是非常困难的。
就我所知,本文是第一篇致力于综述用于语义分割的深度模型技术的文章。已经有较多的关于语义分割的综述调查,比如[12,13]等,这些工作在总结、分类现有方法、讨论数据集及评价指标以及为未来研究者提供设计思路等方面做了很好的工作。但是,这些文章缺少对某些最新数据集的介绍,他们不去分析框架的情况,而且没有提供深度学习技术的细节。因此,我们认为本文是全新的工作,而且这对于深度学习相关的语义分割社区有着重要意义。
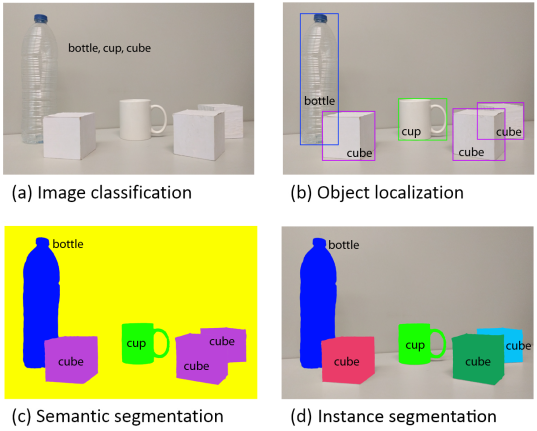
图 1 物体识别或场景理解相关技术从粗粒度推理到细粒度推理的演变:四幅图片分别代表分类、识别与定位、语义分割、实例分割。
本文核心贡献如下:
1)我们对于现有的数据集给出了一个全面的调查,这些数据集将会对深度学习技术推动的分割项目发挥作用;
2)我们对于多数重要的深度学习语义分割方法进行了深度有条理的综述,包括他们的起源、贡献等;
3)我们进行了彻底的性能评估,使用了多种评价指标如准确率、运行时间、内存占用等;
4)我们对以上结果进行了讨论,并给出了未来工作的一系列可能的发展方向,这些方向可能在未来的发展进程中取得优势。我们还给出了该领域目前最好方法的总结。
本文剩余部分安排:
第二章介绍了语义分割问题,同时引入了相关工作中常用的符号、惯例等。其他的背景概念如通用的深度神经网络也在这章中回顾;
第三章介绍了现有的数据集、挑战及实验基准;
第四章回顾了现有方法,基于其贡献自下而上排序。本章重点关注这些方法的理论及闪光点,而不是给出一个定量的评估;
第五章给出了一个简短的对于现有方法在给定数据集上定量表现的讨论,另外还有未来相关工作的发展方向;
第六章则总结全文并对相关工作及该领域目前最优方法进行了总结。
2 术语及背景概念
为了更好地理解语义分割问题是如何用深度学习框架解决的,有必要了解到其实基于深度学习的语义分割并不是一个孤立的领域,而是在从粗糙推理到精细化推理过程中很自然的一步。这可以追溯到分类问题,包括对整个输入做出预测,即预测哪个物体是属于这幅图像的,或者给出多个物体可能性的排序。对于细粒度推理来说,将接下来进行物体的定位与检测,这将不止提供物体的类别,而且提供关于各类别空间位置的额外信息,比如中心点或者边框。这样很显然,语义分割是实现细粒度推理的很自然的一步,它的目标是:对每个像素点进行密集的预测,这样每个像素点均被标注上期对应物体或区域的类别。这还可以进一步改进,比如实例分割(即对同一类的不同实例标以不同的标签),甚至是基于部分的分割(即对已经分出不同类别的图像进行底层分解,找到每个类对应的组成成分)。图1展示了以上提到的演变过程。在本文中,我们主要关注一般的场景标注,也就是像素级别的分割,但是我们也会回顾实例分割及基于部分的分割的较重要的方法。
最后,像素级别的标注问题可以松弛为以下公式:对于随机变量集合 中的每个随机变量,找到一种方法为其指派一个来自标签空间 中的一个状态。每个标签 表示唯一的一个类或者物体,比如飞机、汽车、交通标志或背景等。这个标签空间有 个可能的状态,通常会被扩展为 +1个,即视 为背景或者空的类。通常, 是一个二维的图像,包含W*H=N的像素点x。但是,这个随机变量的集合可以被扩展到任意维度,比如体数据或者超谱图像。
除了问题的定义,回顾一些可能帮助读者理解的背景概念也是必要的。首先是一些常见的被用作深度语义分割系统的网络、方法以及设计决策;另外还有用于训练的一些常见的技术比如迁移学习等。最后是数据的预处理以及增强式的方法等。
2.1 常见的深度网络架构
正如之前所讲,某些深度网络已经对该领域产生了巨大的贡献,并已成为众所周知的领域标准。这些方法包括AlexNet,VGG-16,GoogLeNet,以及ResNet。还有一些是由于其被用作许多分割架构的一部分而显得重要。因此,本文将在本章致力于对其进行回顾。
2.1.1 AlexNet
AlexNet(以作者名字Alex命名)首创了深度卷积神经网络模型,在2012年ILSVRC(ImageNet大规模图像识别)竞赛上以top-5准确率84.6%的成绩获胜,而与之最接近的竞争者使用了传统的而非深度的模型技术,在相同的问题下仅取得了73.8%的准确率。由Krizhecsky等人[14]给出的架构相对简单,包括卷积层、max-pooling层及ReLU层各五层作为非线性层,全连接层三层以及dropout层。图2给出了这个架构的示意。

图 2 文献[14]中给出的AlexNet卷积神经网络架构。
2.1.2 VGG
VGG是由牛津大学Visual Geometry Group提出的卷积神经网络模型(以课题组的名字命名)。他们提出了深度卷积神经网络的多种模型及配置[15],其中一种提交到了2013年ILSVRC(ImageNet大规模图像识别)竞赛上。这个模型由于由16个权重层组成,因此也被称为VGG-16,其在该竞赛中取得了top-5上92.7%的准确率。图3展示了VGG-16的模型配置。VGG-16与之前的模型的主要的不同之处在于,其在第一层使用了一堆小感受野的卷积层,而不是少数的大感受野的卷积层。这使得模型的参数更少,非线性性更强,也因此使得决策函数更具区分度,模型更好训练。
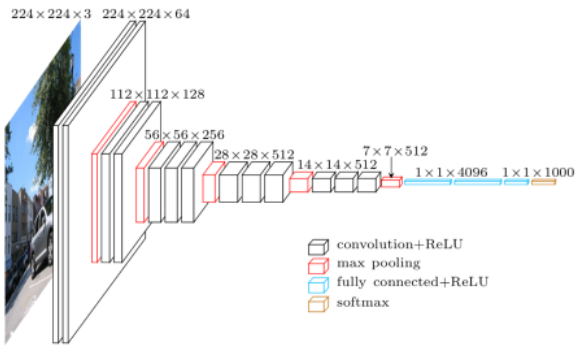
图 3 VGG-16卷积神经网络模型架构,本图经许可取自Matthieu Cord的演讲。
2.1.3 GoogLeNet
GoogLeNet是由Szegedy等人[16]提出的在ILSVRC-2014竞赛上取得top-5上93.3%准确率的模型。这个CNN模型以其复杂程度著称,事实上,其具有22个层以及新引入的inception模块(如图4所示)。这种新的方法证实了CNN层可以有更多的堆叠方式,而不仅仅是标准的序列方式。实际上,这些模块由一个网络内部的网络层(NiN)、一个池化操作、一个大卷积核的卷积层及一个小核的卷积层组成。所有操作均并行计算出来,而后进行1×1卷积操作来进行降维。由于这些模块的作用,参数及操作的数量大大减少,网络在存储空间占用及耗时等方面均取得了进步
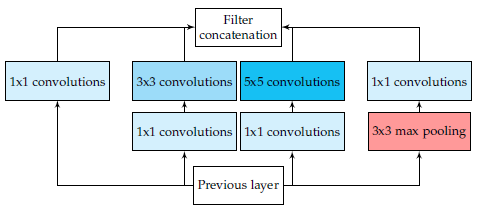
图 4 GoogLeNet框架中带有降维的Inception模块。
2.1.4 ResNet
微软提出的ResNet[17]由于在ILSVRC-2016中取得的96.4%的准确率而广受关注。除了准确率较高之外,ResNet网络还以其高达152层的深度以及对残差模块的引入而闻名。残差模块解决了训练真正深层网络时存在的问题,通过引入identity skip connections网络各层可以把其输入复制到后面的层上。
本方法的关键想法便是,保证下一层可以从输入中学到与已经学到的信息不同的新东西(因为下一层同时得到了前一层的输出以及原始的输入)。另外,这种连接也协助解决了梯度消失的问题。

图 5 ResNet中的残差模块。
2.1.5 ReNet
为了将循环神经网络RNN模型扩展到多维度的任务上,Graves等人[18]提出了一种多维度循环神经网络(MDRNN)模型,将每个单一的循环连接替换为带有d个连接的标准RNN,其中d是数据的spatio-temporal维度。基于这篇工作,Visin等人[19]提出了ReNet模型,其不使用多维RNN模型,而是使用常见的序列RNN模型。这样,RNN模型的数量在每一层关于d(输入图像的维数2d)线性增长。在ReNet中,每个卷积层(卷积+池化)被4个同时在水平方向与竖直方向切分图像的RNN模型所替代,如图6所示:
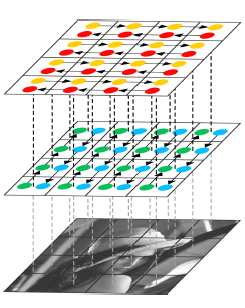
图 6 ReNet架构中的一层,对竖直与水平方向的空间依赖性建模
2.2 迁移学习
从头训练一个深度神经网络通常是不可行的,有这样两个原因:训练需要足量的数据集,而这一般是很难得到的;网络达到收敛需要很长的时间。即便得到了足够大的数据集并且网络可以在短时间内达到收敛,从之前的训练结果中的权重开始训练也总比从随机初始化的权重开始训练要好[20,21]。迁移学习的一种重要的做法便是从之前训练好的网络开始继续训练过程来微调模型的权重值。
Yosinski等人[22]证明了即便是从较不相关的任务中迁移学习来的特征也要比直接从随机初始化学习的特征要好,这个结论也考虑到了随着提前训练的任务与目标任务之间差异的增大,可迁移性将减小的情况。
然而,迁移学习技术的应用并没有如此的直接。一方面,使用提前训练的网络必须满足网络架构等的约束,不过,因为一般不会新提出一个全新的网络结构来使用,所以使用现有的网络架构或网络组件进行迁移学习是常见的;另一方面,迁移学习中的训练过程本身相对于从头开始的训练过程来说区别非常小。合理选择进行微调的层是很重要的,一般选网络中较高的层因为底层一般倾向于保留更加通用的特征;同时,合理地确定学习率也是重要的,一般选取较小的值,因为一般认为提前训练的权重相对比较好,无需过度修改。
由于收集和创建像素级别的分割标注数据集的内在的困难性,这些数据集的规模一般不如分类数据集如ImageNet[23,24]等的大。分割研究中数据集的规模问题在处理RGB-D或3D数据集时更加严重,因为这些数据集规模更小。也因此,迁移学习,尤其是从提前训练好的分类网络中微调而来的方式,将会成为分割领域的大势所趋,并且已经有方法成功地进行了应用,我们将在后面几章进行回顾。
2.3 数据预处理与数据增强
数据增强技术被证明了有利于通用的尤其是深度的机器学习架构的训练,无论是加速收敛过程还是作为一个正则项,这也避免了过拟合并增强了模型泛化能力[15]。
数据增强一般包括在数据空间或特征空间(或二者均有)上应用一系列的迁移技术。在数据空间上应用增强技术最常见,这种增强技术应用迁移方法从已有数据中得到新的样本。有很多的可用的迁移方法:平移、旋转、扭曲、缩放、颜色空间转换、裁剪等。这些方法的目标均是通过生成更多的样本来构建更大的数据集,防止过拟合以及对模型进行正则化,还可以对该数据集的各个类的大小进行平衡,甚至手工地产生对当前任务或应用场景更加具有代表性的新样本。
数据增强对小数据集尤其有用,而且其效用已经在长期使用过程中被证明。例如,在[26]中,有1500张肖像图片的数据集通过设计4个新的尺寸(0.6,0.8,1.2,1.5),4个新的旋角(-45,-22,22,45),以及4个新的gamma变化(0.5,0.8,1.2,1.5)被增强为有着19000张训练图像的数据集。通过这一处理,当使用增强数据集进行微调时,其肖像画分割系统的交叠准确率(IoU)从73.09%提升到了94.20%。
3 数据集及竞赛
以下两种读者应该阅读本部分内容:一是刚刚开始研究本领域问题的读者,再就是已经很有经验但是想了解最近几年其他研究者研究成果的可取之处的读者。虽然第二种读者一般很明确对于开始语义分割相关的研究来说数据集及竞赛是很重要的两个方面,但是对于初学者来说掌握目前最优的数据集以及(主流的)竞赛是很关键的。因此,本章的目标便是对研究者进行启发,提供一个对数据集的简要总结,这里面可能有正好他们需求的数据集以及数据增强或预处理等方面的技巧。不过,这也可以帮助到已经有深入研究的工作者,他们可能想要回顾基础或者挖掘新的信息。
值得争辩的是,对于机器学习来说数据是最重要的或者最重要的之一。当处理深度网络时,这种重要性更加明显。因此,收集正确的数据放入数据集对于任何基于深度学习的分割系统来说都是极为重要的。收集与创建一个足够大而且能够正确代表系统应用场景的数据集,需要大量的时间,需要领域专门知识来挑选相关信息,也需要相关的基础设施使得系统可以正确的理解与学习(捕捉到的数据)。这个任务的公式化过程虽然相比复杂的神经网络结构的定义要简单,但是其解决过程却是相关工作中最难的之一。因此,最明智的做法通常是使用一个现存的足够可以代表该问题应用场景的标准数据集。使用标准数据集还有一个好处就是可以使系统间的对比更加公平,实际上,许多数据集是为了与其他方法进行对比而不是给研究者测试其算法的,在对比过程中,会根据方法的实际表现得到一个公平的排序,其中不涉及任何数据随机选取的过程。
接下来我们将介绍语义分割领域最近最受欢迎的大规模数据集。所有列出的数据集均包含像素级别或点级别的标签。这个列表将根据数据内在属性分为3个部分:2维的或平面的RGB数据集,2.5维或带有深度信息的RGB(RGB-D)数据集,以及纯体数据或3维数据集。表1给出了这些数据集的概览,收录了所有本文涉及的数据集并提供了一些有用信息如他们的被构建的目的、类数、数据格式以及训练集、验证集、测试集划分情况。
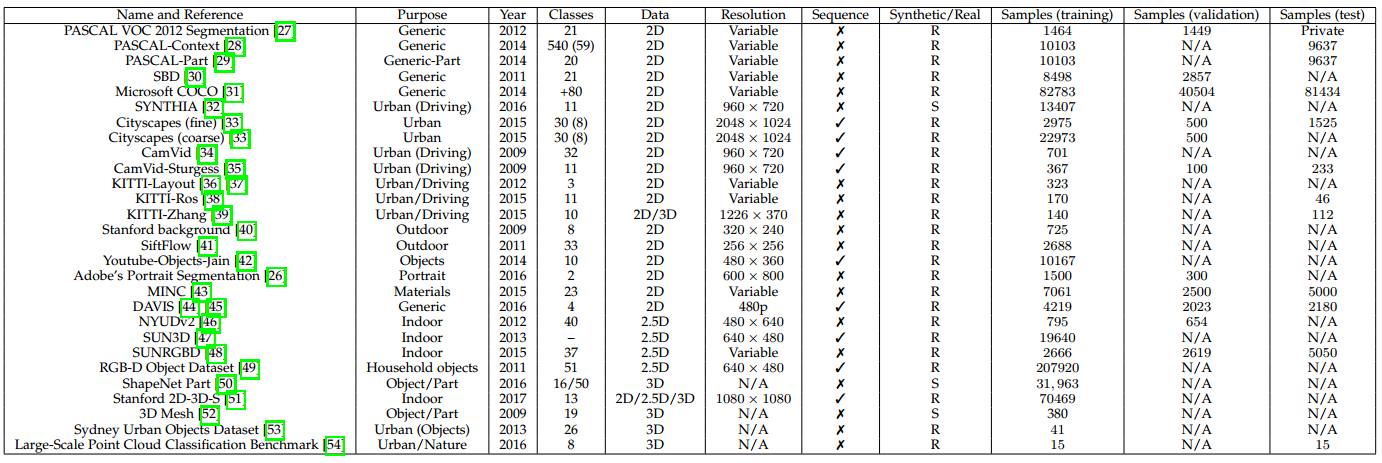
表 1 常见的大规模分割数据集
3.1 2维数据集
自始至终,语义分割问题最关注的是二维图像。因此,二维数据集在所有类型中是最丰富的。本章我们讨论语义分割领域最流行的二维大规模数据集,这考虑到所有的包含二维表示如灰度或RGB图像的数据集。
PASCAL视觉物体分类数据集(PASCAL-VOC)[27] (http://host.robots.ox.ac.uk/pascal/VOC/voc2012/) : 包括一个标注了的图像数据集和五个不同的竞赛:分类、检测、分割、动作分类、人物布局。分割的竞赛很有趣:他的目标是为测试集里的每幅图像的每个像素预测其所属的物体类别。有21个类,包括轮子、房子、动物以及其他的:飞机、自行车、船、公共汽车、轿车、摩托车、火车、瓶子、椅子、餐桌、盆栽、沙发、显示器(或电视)、鸟、猫、狗、马、绵羊、人。如果某像素不属于任何类,那么背景也会考虑作为其标签。该数据集被分为两个子集:训练集1464张图像以及验证集1449张图像。测试集在竞赛中是私密的。争议的说,这个数据集是目前最受欢迎的语义分割数据集,因此很多相关领域卓越的工作将其方法提交到该数据集的评估服务器上,在其测试集上测试其方法的性能。方法可以只用该数据集训练,也可以借助其他的信息。另外,其方法排行榜是公开的而且可以在线查询。

PASCAL 上下文数据集(PASCAL Context) [28] (http://www.cs.stanford.edu/∼roozbeh/pascal-context/):对于PASCAL-VOC 2010识别竞赛的扩展,包含了对所有训练图像的像素级别的标注。共有540个类,包括原有的20个类及由PASCAL VOC分割数据集得来的图片背景,分为三大类,分别是物体、材料以及混合物。虽然种类繁多,但是只有59个常见类是较有意义的。由于其类别服从一个幂律分布,其中有很多类对于整个数据集来说是非常稀疏的。就这点而言,包含这59类的子集常被选作真实类别来对该数据集进行研究,其他类别一律重标为背景。

PASCAL 部分数据集(PASCAL Part)[29] (http://www.stat.ucla.edu/∼xianjie.chen/pascal part dataset/pascal part.html):对于PASCAL-VOC 2010识别竞赛的扩展,超越了这次竞赛的任务要求而为图像中的每个物体的部分提供了一个像素级别的分割标注(或者当物体没有连续的部分的时候,至少是提供了一个轮廓的标注)。原来的PASCAL-VOC中的类被保留,但被细分了,如自行车被细分为后轮、链轮、前轮、手把、前灯、鞍座等。本数据集包含了PASCAL VOC的所有训练图像、验证图像以及9637张测试图像的标签。

语义边界数据集(SBD)[30] (http://home.bharathh.info/home/sbd):是PASCAL数据集的扩展,提供VOC中未标注图像的语义分割标注。提供PASCAL VOC 2011 数据集中11355张数据集的标注,这些标注除了有每个物体的边界信息外,还有类别级别及实例级别的信息。由于这些图像是从完整的PASCAL VOC竞赛中得到的,而不仅仅是其中的分割数据集,故训练集与验证集的划分是不同的。实际上,SBD有着其独特的训练集与验证集的划分方式,即训练集8498张,验证集2857张。由于其训练数据的增多,深度学习实践中常常用SBD数据集来取代PASCAL VOC数据集。

微软常见物体环境数据集(Microsoft COCO) [31]:(http://mscoco.org/) 是另一个大规模的图像识别、分割、标注数据集。它可以用于多种竞赛,与本领域最相关的是检测部分,因为其一部分是致力于解决分割问题的。该竞赛包含了超过80个类别,提供了超过82783张训练图片,40504张验证图片,以及超过80000张测试图片。特别地,其测试集分为4个不同的子集各20000张:test-dev是用于额外的验证及调试,test-standard是默认的测试数据,用来与其他最优的方法进行对比,test-challenge是竞赛专用,提交到评估服务器上得出评估结果,test-reserve用于避免竞赛过程中的过拟合现象(当一个方法有嫌疑提交过多次或者有嫌疑使用测试数据训练时,其在该部分子集上的测试结果将会被拿来作比较)。由于其规模巨大,目前已非常常用,对领域发展很重要。实际上,该竞赛的结果每年都会在ECCV的研讨会上与ImageNet数据集的结果一起公布。

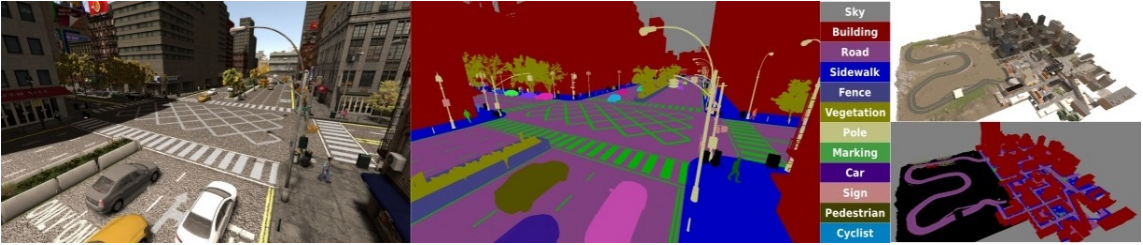
图像与注释合成数据集(SYNTHIA)[32] (http://synthia-dataset.net/)是一个大规模的虚拟城市的真实感渲染图数据集,带有语义分割信息,是为了在自动驾驶或城市场景规划等研究领域中的场景理解而提出的。提供了11个类别物体(分别为空、天空、建筑、道路、人行道、栅栏、植被、杆、车、信号标志、行人、骑自行车的人)细粒度的像素级别的标注。包含从渲染的视频流中提取出的13407张训练图像,该数据集也以其多变性而著称,包括场景(城镇、城市、高速公路等)、物体、季节、天气等。
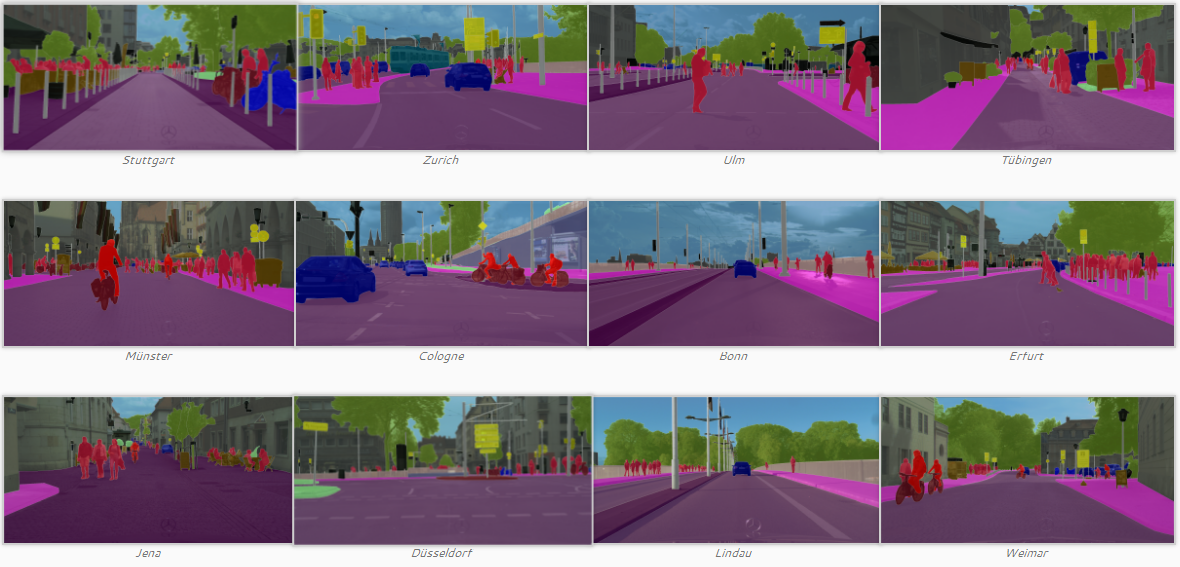
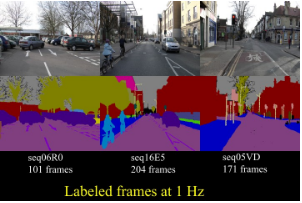
城市风光数据集 [33] (https://www.cityscapes-dataset.com/)是一个大规模的关注于城市街道场景理解的数据集,提供了8种30个类别的语义级别、实例级别以及密集像素标注(包括平坦表面、人、车辆、建筑、物体、自然、天空、空)。该数据集包括约5000张精细标注的图片,20000张粗略标注的图片。数据是从50个城市中持续数月采集而来,涵盖不同的时间以及好的天气情况。开始起以视频形式存储,因此该数据集按照以下特点手动选出视频的帧:大量的动态物体,变化的场景布局以及变化的背景。
CamVid数据集 [55,34] (http://mi.eng.cam.ac.uk/research/projects/VideoRec/CamVid/)是一个道路、驾驶场景理解数据集,开始是五个视频序列,来自一个安装在汽车仪表盘上的960x720分辨率的摄相机。这些序列中采样出了701个帧(其中4个序列在1fps处,1个序列在15fps处),这些静态图被手工标注上32个类别:空、建筑、墙、树、植被、栅栏、人行道、停车场、柱或杆、锥形交通标志、桥、标志、各种文本、信号灯、天空、……(还有很多)。值得注意的是,Sturgess等人[35]将数据集按照367-100-233的比例分为训练集、验证集、测试集,这种分法使用了部分类标签:建筑、树、天空、车辆、信号、道路、行人、栅栏、杆、人行道、骑行者。
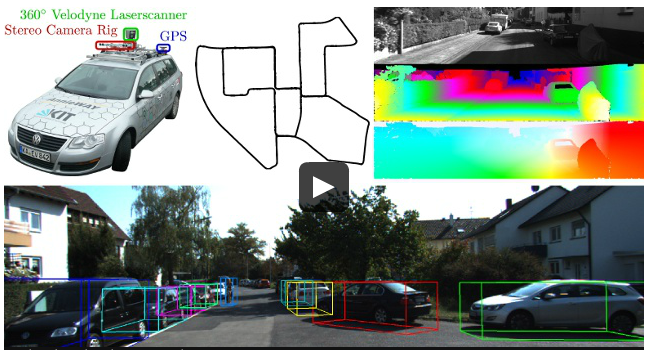
KITTI [56] 是用于移动机器人及自动驾驶研究的最受欢迎的数据集之一,包含了由多种形式的传感器得出的数小时的交通场景数据,包括高分辨率RGB、灰度立体摄像机以及三维激光扫描器。尽管很受欢迎,该数据集本身并没有包含真实语义分割标注,但是,众多的研究者手工地为该数据集的部分数据添加标注以满足其问题的需求。Alvarez等人[36,37]为道路检测竞赛中的323张图片生成了真实标注,包含三个类别:道路、垂直面和天空。Zhang等人[39]标注了252张图片,其中140张训练、112张测试,其选自追踪竞赛中的RGB和Velodyne扫描数据,共十个类。Ros等人[38]在视觉测距数据集中标注了170个训练图片和46个测试图片,共11个类。
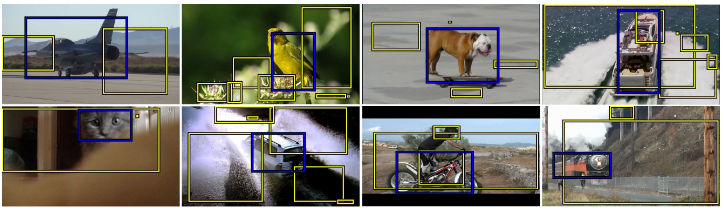
YouTube物体数据集 [57] 是从YouTube上采集的视频数据集,包含有PASCAL VOC中的10个类。该数据集不包含像素级别的标注,但是Jain等人[42]手动的标注了其126个序列的子集。其在这些序列中每10个帧选取一张图片生成器语义标签,总共10167张标注的帧,每帧480x360的分辨率。
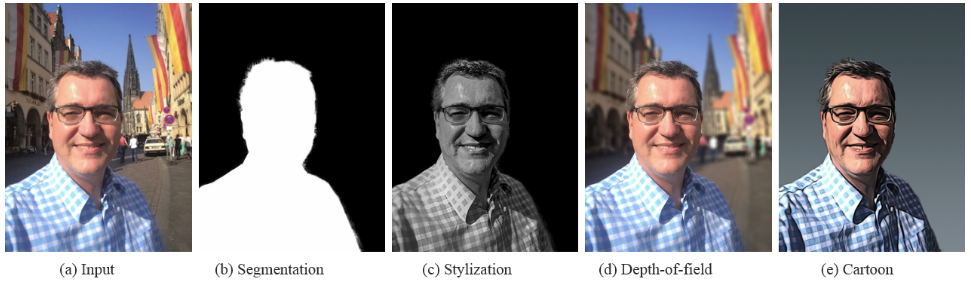
Adobe肖像分割数据集 [26] (http://xiaoyongshen.me/webpage portrait/index.html) 包含从Flickr中收集的800x600的肖像照片,主要是来自手机前置摄像头。该数据集包含1500张训练图片和300张预留的测试图片,这些图片均完全被二值化标注为人或背景。图片被半自动化的标注:首先在每幅图片上运行一个人脸检测器,将图片变为600x800的分辨率,然后,使用Photoshop快速选择工具将人脸手工标注。这个数据集意义重大,因为其专门适用于人脸前景的分割问题。
上下文语料数据集(MINC)[43] 是用于对块进行分类以及对整个场景进行分割的数据集。该数据集提供了23个类的分割标注(文中有详细的各个类别的名称),包含7061张标注了的分割图片作为训练集,5000张的测试集和2500张的验证集。这些图片均来自OpenSurfaces数据集[58],同时使用其他来源如Flickr或Houzz进行增强。因此,该数据集中的图像的分辨率是变化的,平均来看,图片的分辨率一般是800x500或500x800。

密集标注的视频分割数据集(DAVIS)[44,45](http://davischallenge.org/index.html):该竞赛的目标是视频中的物体的分割,这个数据集由50个高清晰度的序列组成,选出4219帧用于训练,2023张用于验证。序列中的帧的分辨率是变化的,但是均被降采样为480p的。给出了四个不同类别的像素级别的标注,分别是人、动物、车辆、物体。该数据集的另一个特点是每个序列均有至少一个目标前景物体。另外,该数据集特意地较少不同的大动作物体的数量。对于那些确实有多个前景物体的场景,该数据集为每个物体提供了单独的真实标注,以此来支持实例分割。

斯坦福背景数据集[40] (http://dags.stanford.edu/data/iccv09Data.tar.gz)包含了从现有公开数据集中采集的户外场景图片,包括LabelMe, MSRC, PASCAL VOC 和Geometric Context。该数据集有715张图片(320x240分辨率),至少包含一个前景物体,且有图像的水平位置信息。该数据集被以像素级别标注(水平位置、像素语义分类、像素几何分类以及图像区域),用来评估场景语义理解方法。

SiftFlow [41]:包含2688张完全标注的图像,是LabelMe数据集[59]的子集。多数图像基于8种不同的户外场景,包括街道、高山、田地、沙滩、建筑等。图像是256x256的,分别属于33个语义类别。未标注的或者标为其他语义类别的像素被认为是空。

3.2 2.5维数据集
随着廉价的扫描器的到来,带有深度信息的数据集开始出现并被广泛使用。本章,我们回顾最知名的2.5维数据集,其中包含了深度信息。
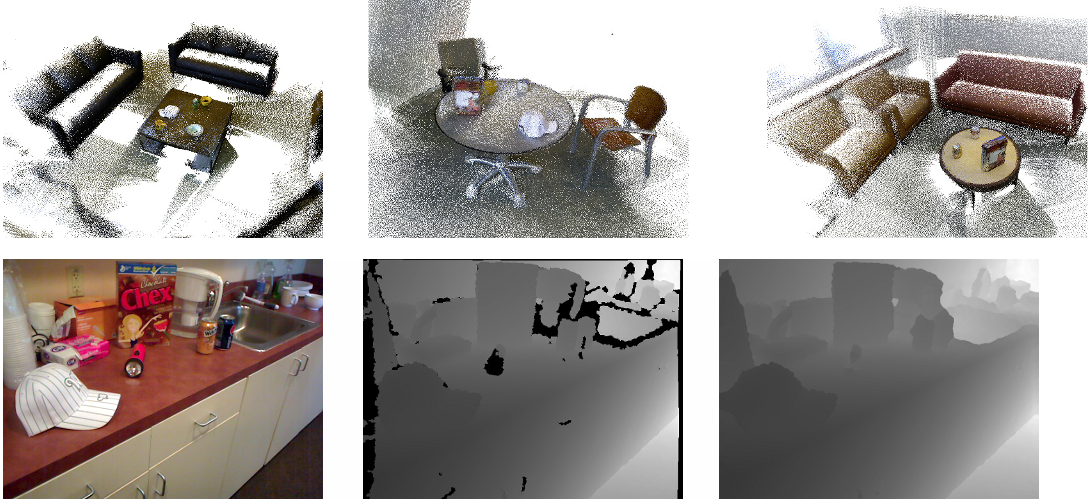
NYUDv2数据集[46](http://cs.nyu.edu/∼silberman/projects/indoor scene seg sup.html)包含1449张由微软Kinect设备捕获的室内的RGB-D图像。其给出密集的像素级别的标注(类别级别和实力级别的均有),训练集795张与测试集654张均有40个室内物体的类[60],该数据集由于其刻画室内场景而格外重要,使得它可以用于某种家庭机器人的训练任务。但是,它相对于其他数据集规模较小,限制了其在深度网络中的应用。
SUN3D数据集[47](http://sun3d.cs.princeton.edu/):与NYUDv2数据集相似,该数据集包含了一个大规模的RGB-D视频数据集,包含8个标注了的序列。每一帧均包含场景中物体的语义分割信息以及摄像机位态信息。该数据集还在扩充中,将会包含415个序列,在41座建筑中的254个空间中获取。另外,某些地方将会在一天中的多个时段被重复拍摄。

SUNRGBD数据集[48](http://rgbd.cs.princeton.edu/)由四个RGB-D传感器得来,包含10000张RGB-D图像,尺寸与PASCAL VOC一致。该数据集包含了NYU depth v2 [46], Berkeley B3DO [61], 以及SUN3D [47]数据集中的图像,整个数据集均为密集标注,包括多边形、带方向的边界框以及三维空间,适合于场景理解任务。
物体分割数据集(OSD)[62](http://www.acin.tuwien.ac.at/?id=289)该数据集用来处理未知物体的分割问题,甚至是在部分遮挡的情况下进行处理。该数据集有111个实例,提供了深度信息与颜色信息,每张图均进行了像素级别的标注,以此来评估物体分割方法。但是,该数据集并没有区分各个类,使其退化为一个二值化的数据集,包含物体与非物体两个类。


RGB-D物体数据集[49] (http://rgbd-dataset.cs.washington.edu/)该数据集由视频序列构成,有300个常见的室内物体,分为51个类,使用WordNet hypernym-hyponym关系进行分类。该数据集使用Kinect型三维摄像机进行摄制,640x480RGB图像,深度信息30赫兹。对每一帧,数据集提供了RGB-D及深度信息,这其中包含了物体、位置及像素级别的标注。另外,每个物体放在旋转的桌面上以得出360度的视频序列。对于验证过程,其提供了22个标注的自然室内场景的包含物体的视频序列。
3.3 3维数据集
纯粹的三维数据集是稀缺的,通常可以提供CAD网格或者其他的体元表示如点云等。为分割问题获取三维数据集是困难的,因此很少有深度学习方法可以处理这种数据。也因此,三维数据集目前还不是很受欢迎。尽管如此,我们还是介绍目前出现的相关数据集来解决现有的问题。
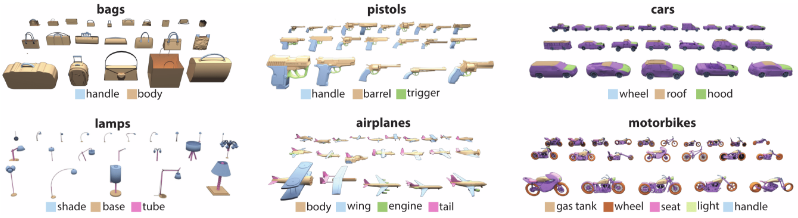
ShapeNet部分数据集[50](http://cs.stanford.edu/ericyi/project page/part annotation/)是ShapeNet[63]数据集的子集,关注于细粒度的三维物体分割。包含取自元数据及16个类的31693个网格,每个形状类被标注为二到五个部分,整个数据集共有50个物体部分,也就是说,物体的每个部分比如飞机的机翼、机身、机尾、发动机等都被标注了。真实标注按照被网格分割开的点呈现。
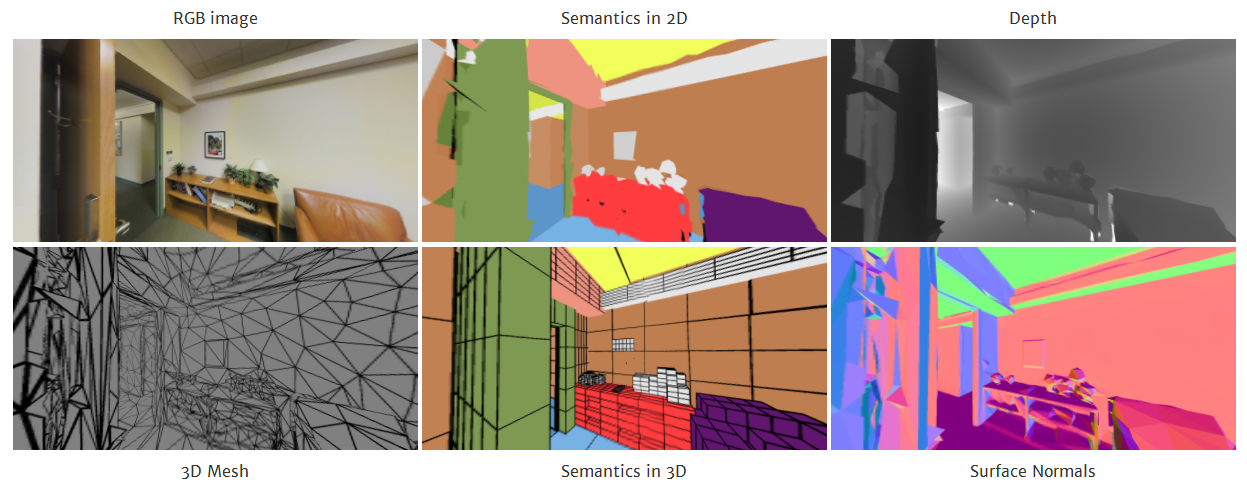
斯坦福2D-3D-S数据集[51](http://buildingparser.stanford.edu)是一个多模态、大规模室内空间数据集,是斯坦福三维语义分析工作[64]的扩展。提供了多个模态:二维RGB,2.5维添加深度信息的图片、三维网格和点云,均提供分割标注信息。该数据集有70496张高分辨率的RGB图像(1080x1080分辨率),以及其对应的深度图谱、表面法线、网格以及点云,军事带有像素级别及点级别的语义标注信息。这些数据取自6个室内区域,分别来自三个不同的教育与办公建筑。共有271个房间,大约7亿个点,被标以13个类。
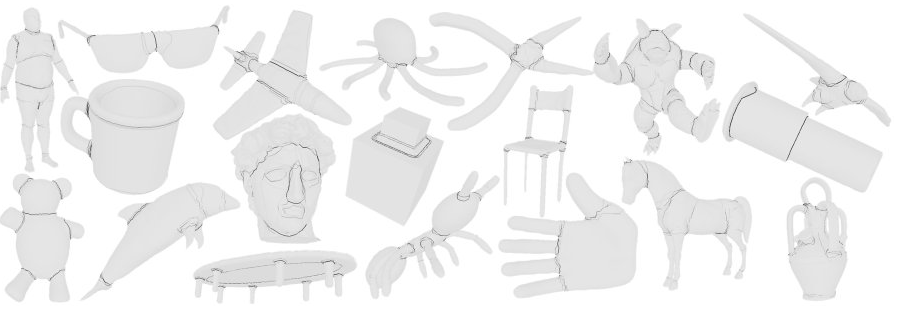
三维网格分割基准数据集[52](http://segeval.cs.princeton.edu/)该基准数据集有380个网格,被分为19个类。每个网格手动的被分割为不同的功能区域,主要目标是提供对于人们如何分配网格功能的一个概率分布。
悉尼城市物体数据集[53](http://www.acfr.usyd.edu.au/papers/SydneyUrbanObjectsDataset.shtml)该数据集包含多个常见的城市道路物体,由Velodyne HDK-64E LIDAR扫描得到,共有631个独立扫描的点云,由车辆、行人、标志、树木等类别组成。有趣的是,除了正常的扫描之外,还提供了全景360度的扫描标注。
大规模点云分类基准数据集[54](http://www.semantic3d.net/)该基准数据集提供手工标注的三维点云,面向自然与城市场景。该数据集在形成点云时保留了细节与密度等信息,训练集和测试集各包含15个大规模的点云,其规模达到超过十亿个标注点的级别。
4 方法
深度学习技术在各种高层视觉任务上取得了巨大的成功,尤其是监督方法如卷积神经网络CNN用于图像分类或物体检测 [14,15,16],这激励着研究者们探索这些方法的像素级别标注能力,如语义分割能力。这些深度学习技术区别于传统方法的关键优势在于其强大的针对当前问题学习合适的特征表示的能力,例如,对于一个特定数据集的像素级标注问题,其使用一种端对端的方法而不是手工设计的特征,而手工设计特征需要领域专门知识、耗时耗力而且有时太过精细化以致于只能在某个特定的场景下使用。
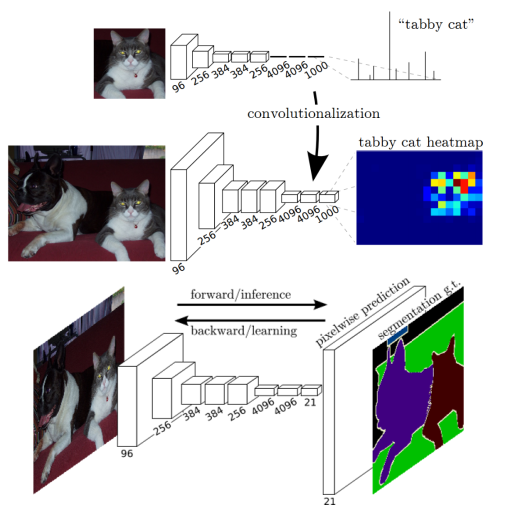
图 7 [65]中的全卷积神经网络示意图。将全连接层替换为卷积层,便可将用于分类的CNN网络转化为生成空间热区的网络。加入反卷积层来实现上采样,使得网络可以进行密集推理并学到每个像素点的标签。
最近,最成功用于语义分割的深度学习技术均来自同一个工作,即全卷积网络FCN [65],该方法的出色之处在于,其利用了现存的CNN网络作为其模块之一来产生层次化的特征。作者将现存的知名的分类模型包括AlexNet、VGG-16、GoogLeNet和ResNet等转化为全卷积模型:将其全连接层均替换为卷积层,输出空间映射而不是分类分数。这些映射由小步幅卷积上采样(又称反卷积)得到,来产生密集的像素级别的标签。该工作被视为里程碑式的进步,因为它阐释了CNN如何可以在语义分割问题上被端对端的训练,而且高效的学习了如何基于任意大小的输入来为语义分割问题产生像素级别的标签预测。本方法在标准数据集如PASCAL VOC分割准确率上相对于传统方法取得了极大的进步,且同样高效。由于上述及更多显著的贡献,FCN成为了深度学习技术应用于语义分割问题的基石,其处理过程如图7所示。
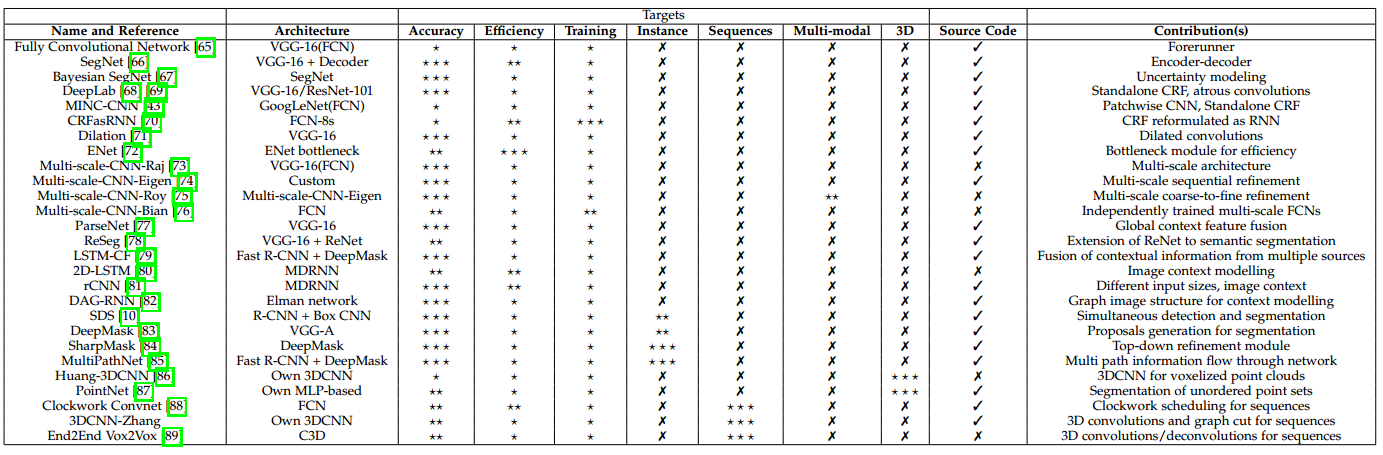
表 2 基于深度学习的语义分割方法总结
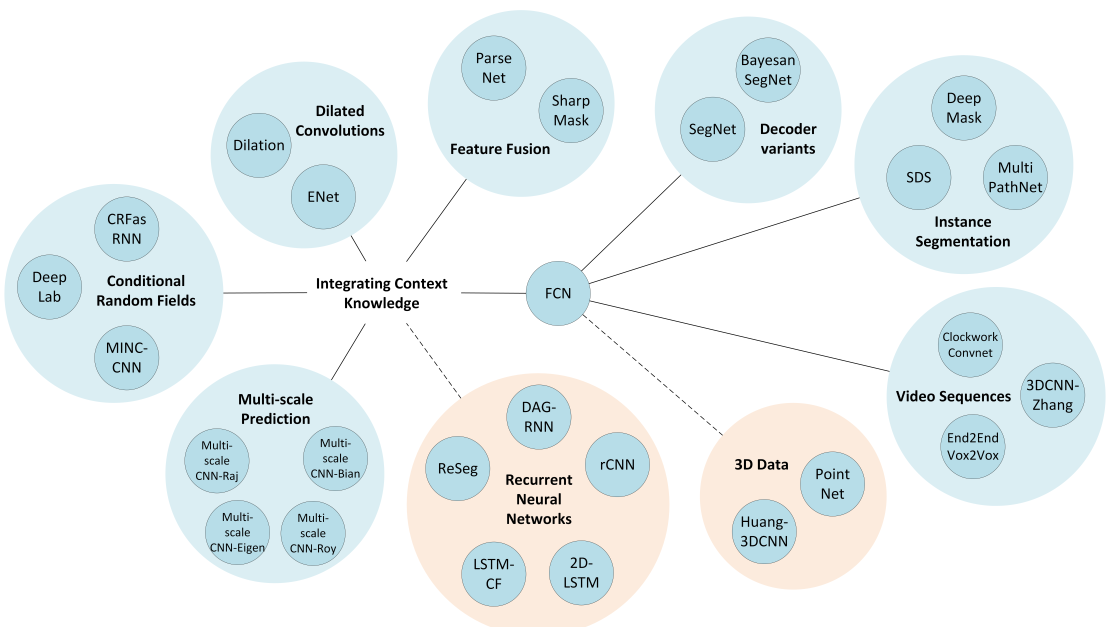
图 8 所提及方法的形象化展示
尽管FCN模型强大而普适,它任然有着多个缺点从而限制其对于某些问题的应用:其固有的空间不变性导致其没有考虑到有用的全局上下文信息,其并没有默认考虑对实例的辨识,其效率在高分辨率场景下还远达不到实时操作的能力,并且其不完全适合非结构性数据如3D点云,或者非结构化模型。这些问题我们将在本节进行综述,同时给出目前最优的解决这些问题的办法。表2给出了这个综述的总结,展示了所有的提及的方法(按照本节中出现的先后排序)、他们所基于的架构、主要的贡献、以及基于其任务目标的分级:准确率、效率、训练难度、序列数据处理、多模式输入以及3D数据处理能力等。每个目标分为3个等级,依赖于对应工作对该目标的专注程度,叉号则代表该目标问题并没有被该工作考虑进来。另外,图8对提及方法的关系进行了形象化的描述。
4.1 解码器变体
除了FCN之外,还有其他的变体来将原用于分类的网络转化为适合分割的形式。有争议的说,基于FCN的架构更加受欢迎,也更成功,但是其他替代的架构也同样值得注意。一般来说,这些网络均选用一种分类网络如VGG-16,然后去掉其全连接层。分割网络的这个部分通常被称之为编码器,产生低分辨率的图像表示或者特征映射。而问题在于学习如何解码或者将这些低分辨率的图像为分割问题映射到像素级别的预测上去。这部分被称为解码器,一般是这种架构的不同方法的区别所在。
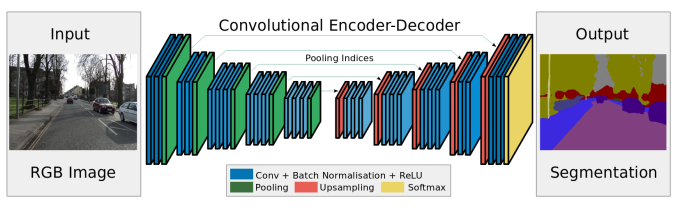
图 9 SegNet架构示意图。一个编码器加一个解码器,然后是一个softmax分类器用于像素级别的分类,图来自[66]。
SegNet [66] 是理解这种区别的很明显的例子(见图9)。解码器部分由一系列的上采样及卷积层组成,最终接上一个softmax分类器来预测像素级别的标签,以此作为输出,可以达到与输入图像相同的分辨率。解码器部分的每个上采样层对应于编码器中的一个最大池化层,解码器中的这些层用索引自编码器阶段的对应的特征映射来进行最大池化,从而对目前的特征映射进行上采样。这些上采样得来的映射接下来将由一系列的可训练的滤波器集合来进行卷积,从而产生密集的特征映射。当特征映射被修复为与原输入相同分辨率的时候,其将被输入softmax分类器中得到最终的分割结果。
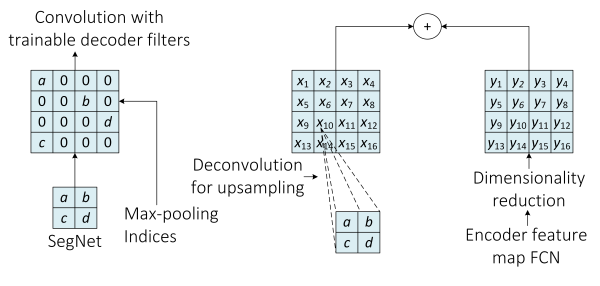
图 10 SegNet(左)与FCN(右)解码器的对比。SegNets用对应的编码器部分最大池化来进行上采样,而FCN学习出反卷积滤波器来进行上采样(其中加入编码器中对应的特征映射)。图取自[66].
而另一方面,基于FCN的架构利用了可学习的反卷积滤波器来对特征映射进行上采样,然后,上采样得到的特征映射将按照元素优先的方式加入到编码器部分卷积层得到的对应的特征映射中。图10展示了两种方法的对比。
4.2 整合上下文知识
语义分割需要对多种空间尺度的信息予以整合,也需要对局部与全局信息进行平衡。一方面,细粒度的或者局部的信息对于提高像素级别的标注的正确率来说是关键的;另一方面,整合图像全局的上下文信息对于解决局部模糊性问题来说也是重要的。
一般的CNN模型对于处理这种平衡不是很擅长。池化层可以使网络取得某种程度的空间不变性并保持同样的计算效率,却丢失了全局的上下文信息。即便是纯的CNN网络,即没有池化曾的CNN,也同样受限,因为其神经元的感受野只能随着层数线性增长。
可以采用很多方法来使CNN对全局信息敏感:用条件随机场(CRF)作为后处理过程来调优结果,多尺度聚合,或者甚至是将对上下文的建模延缓到另一种深度模型中,如RNN。
4.2.1 条件随机场
如前所述,CNN结构内在的空间转化不变性限制了其应用到分割问题上的准确率(尤其是其在空间位置上的准确性)。调优分割架构的输出并强化其捕捉细粒度信息的一个通用的办法就是引入条件随机场(CRF)作为其后处理模块。CRF促成了底层图像信息(如像素间的相互关系[92,93])与产生像素级别的类别标签的多类别推理输出的结合,这种结合对于捕捉长期依赖性质尤其重要,这也是关注于局部细节的CNN所未能考虑到的。
DeepLab模型[68,69]使用了全连接的两两之间的CRF模型[94,95]作为其流程中的一个独立的后处理步骤,以此对分割结果进行调优。该模型将每个像素建模为某区域内的一个节点,无论两个像素距离多远,其两两之间的关系都会被衡量,因此,本模型也被称为密集或全连接因子图。使用此模型后,无论短期的还是长期的像素相互关系都被考虑进来,使得系统可以考虑到分割过程中需要的细节信息,而由于CNN的空间不变性,这些信息是CNN结构所未能考虑的。尽管全连接模型通常是低效的,该模型由于可以用概率推理来近似,所以也可以达到相对地高效。图11展示了这种基于CRF的后处理过程对DeepLab模型产生的得分和信念映射产生的影响。
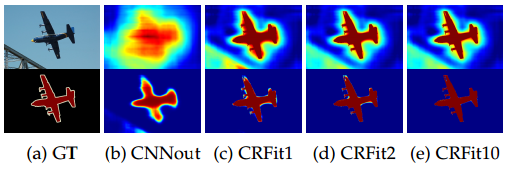
图 11 DeepLab中展示的CRF调优每次迭代带来的影响。第一行是得分映射(softmax之前的层的输出),第二行是信念映射(softmax的输出)。
Wild网络[43]中的材质识别使用了多种CNN模型用来识别MINC数据集中的块。这些CNN模型被以滑动窗口的方式使用,用来分类这些块,他们的权重值被转移到FCN的组成网络中,而FCN通过添加对应的上采样层来整合这些网络。多个输出取平均便得到了一个平均的映射。最后,与DeepLab中相同的CRF(只不过是离散化优化的)被用来预测与调优每个像素点处的材质。
应用CRF来调优FCN网络的分割结果的另一个显著的工作便是Zheng等人提出的CRFasRNN模型[70]。该工作主要的贡献便是将密集CRF重写为带有成对势能的形式,作为网络的组成部分之一。通过展开均值场推理的各个步骤,并将其视为RNN结构,该工作成功地将CRF与RNN整合在一起成为一个完整的端对端的网络。这篇文章的工作说明了将CRF重写为RNN模型来构造出深度网络的一部分,与Pinheiro等人[81]的工作行成了对比,而该工作使用RNN来对大规模的空间依赖性进行建模。
4.2.2 扩张的(dilated)卷积
扩张卷积,又称`a-trous卷积,是对考虑Kronecker的卷积核[96]的扩展,而这种卷积核可以指数级地扩大感受野而不丢失分辨率。换句话说,扩张卷积是常规的利用上采样滤波器的方法。扩张率 控制着上采样因子,如图12所示,堆叠的以l为扩张率的扩张卷积使得感受野呈现指数级的增长,而滤波器的参数保持线性增长。这意味着扩张卷积可以在任意分辨率图片上高效地提取密集特征。另外,值得注意的是一般的卷积只是扩张率为1时的特殊情况。
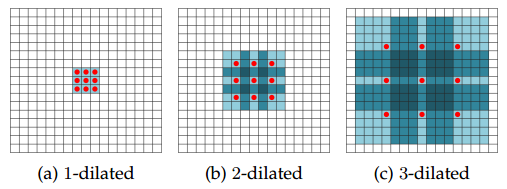
图 12 [71]所展示的不同扩张率的扩张卷积滤波器。(a)中扩张率为1,每个单元有3*3的感受野;(b)中扩张率为2,每个单元有7*7的感受野;(c)中扩张率为3,每个单元有15*15的感受野。
实际上,这与做正常的卷积之前扩张卷积核是等同的,这意味着根据扩张率扩充其尺寸,为空元素位置补零,换句话说,当扩张率大于1时,滤波器参数将与非近邻元素相配对。图13展示了这种扩张的滤波器。
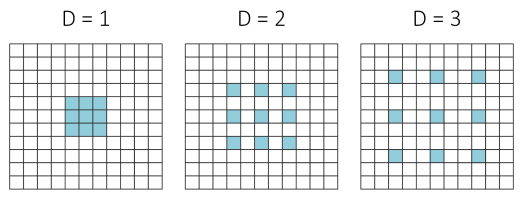
图 13 滤波器元素根据扩张率与输入元素进行配对
使用扩张卷积的最重要的工作便是Yu等人[71]提出的多尺度上下文聚合模型、上文提及的DeepLab模型(其升级版本)[69]、以及实时处理网络ENet[72]。所有这些将越来越大的各种扩张率结合,使得模型具有更大的感受野,同时不增添额外的消耗,也不会过度地对特征映射进行下采样。这些工作同时具有相同的趋势:扩张卷积与紧密多尺度上下文聚合紧密耦合,这我们将在后面章节中解释。
4.2.3 多尺度预测
整合上下文知识的另一种可能的做法便是使用多尺度预测。CNN中几乎每个单独的参数都会影响到得到的特征映射的大小,换句话说,非常相似的架构也会对输入图像的像素数量产生较大的影响,而这关系到每个特征映射。这意味着滤波器将会潜在地检测特定尺度的特征(大致上有着特定的程度)。另外,网络的参数一般都与要解决的问题息息相关,也使得模型向不同尺度的扩展变得更难。一种可能的解决方案便是使用多尺度的网络,这种网络一般都是选用多个处理不同尺度的网络,最后将他们的预测结果结合,产生一个单一的输出。
Raj等人[73] 提出了全卷积VGG-16的一种多尺度版本,有着两个路径,一个是在原始分辨率上处理输入,使用的是一个浅层的卷积网络,再一个就是在两倍分辨率上处理,使用全卷积VGG-16和一个额外的卷积层。第二个路径的结果经过上采样后与第一个路径的结果相结合,这个串联起来的结果再经过一系列的卷积层,得到最终的输出。这样,这个网络便对尺度变换更加鲁棒了。
Roy等人[75]采取了另外的方法解决这个问题,他们选用了包含4个多尺度CNN的网络,而这4个网络有着相同的架构,取自Eigen等人[74]。其中之一致力于为当前场景找出语义标签。这个网络(整体上)以一个从粗糙到精细的尺度序列来逐步的提取特征(如图14)。
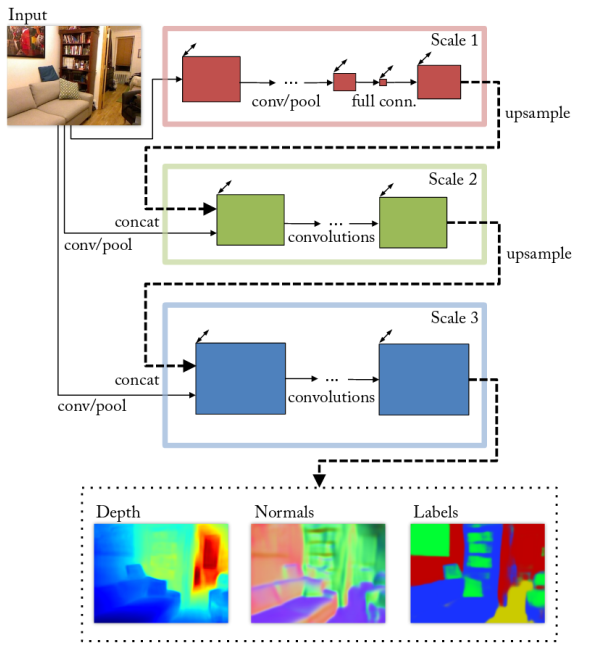
图 14 [74]中提出的多尺度CNN架构,利用一个尺度序列预测深度、法向来逐步将输出调优,并且对一个RGB的输入执行语义分割。
另一个重要的工作是Bian等人[76]提出的网络,这个网络包含n个FCN,可以处理不同尺度的问题。该网络提取的特征将融合在一起(先使用合适的填充方法进行必要的上采样),然后通过一个额外的卷积层之后得到最终的分割结果。这个工作的主要贡献便是这个两步的学习过程,首先,独立的训练每个网络,然后,这些网络将结合,最后一层将被微调。这种多尺度的模型可以高效地添加任意数量的训练好的网络进来。
4.2.4 特征融合
再分割问题中,向全卷积神经网络架构中加入上下文信息的另一种方式便是进行特征融合。特种融合技术将一个全局特征(由某网络中较前面的层提取得到)与一个相对局部的特征映射(后边的层提取得)相结合。常见的架构如原始FCN网络利用跳跃连接的方式进行延迟特征融合,也是通过将不用层产生的特征映射相结合(图15)
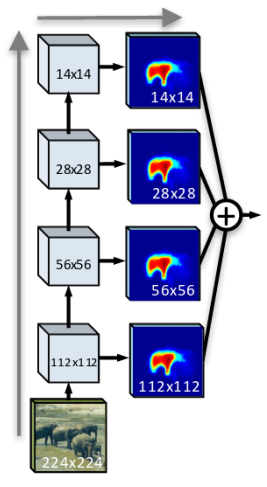
图 15 类似跳跃连接的架构,对特征映射进行延迟融合,其类似于在每个层上做出独立的预测后再对结果进行融合。图来自[84]。(注:每个层均有“分割结果”,最后融合之)
另一种方法便是提前融合,这一方法来自ParseNet[77]中的上下文模块。全局特征被反池化为与局部特征相同的尺寸,然后,将这两种特征进行串联后得到一个合并的特征,输入到下一层或者直接用于分类器的学习。如图16所示。
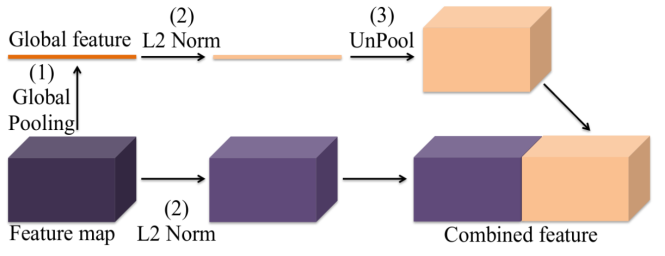
图 16 ParseNet中的上下文模块示意图。较前面的层产生的全局特征与其下一层产生的特征相结合,以此来添加上下文的信息。图来自[77]。
SharpMask[84] 这个工作继续发展了这种特征融合的想法,其引入了一种先进的调优模块来将前面层产生的特征合并到后面的层,这个模块使用的是一种自上而下的架构。由于其重点关注实例分割方面,所以这个工作我们将在后面章节介绍。
4.2.5 循环神经网络RNN
我们注意到,CNN网络在非一维数据如图像等的处理上取得了成功,但是,这些网络依赖于手工设计的核,将网络限制于局部上下文中。而得益于其拓扑结构,循环神经网络成功地应用到了对长期或短期序列的建模上。这样,通过将像素级别的以及局部的信息联系起来,RNN可以成功地建模全局上下文信息并改善语义分割结果。但是,一个重要的问题便是,图片中缺乏自然的序列结构,而标准的RNN架构关注的恰恰是一维的输入。

图 17 ReSeg网络示意图。VGG-16的卷积层以第一层中的蓝色和黄色层展示,余下的架构基于微调目的的ReNet,图取自[78]。
基于面向分类的ReNet模型,Visin等人[19]提出了ReSeg模型[78]用于语义分割,如图17所示。在本方法中,输入图像在第一层VGG-16层中被处理,特征映射结果送入一个或更多的ReNet层中来进行微调。最终,特征映射的尺寸被调整,使用的是基于反卷积的上采样层。在本方法中,门循环单元(GRU)被用来平衡占用空间与计算复杂度。一般的RNN在建模长期依赖关系时表现不好,主要是因为梯度消失问题的存在。由此产生的长短期记忆网络(LSTM)[97] 和GRU [98]是该领域目前最好的两种方法,可以避免以上问题。
受ReNet架构的启发,有人为场景标注问题提出了一种新型的长短期记忆上下文融合模型(LSTM-CF)[99]。该方法使用了两种不同的数据源:RGB信息和深度信息。基于RGB的部分依赖于DeepLab架构[29]的变体,串联了三种不同尺度的特征来丰富特征表达(由[100]处获得启发)。全局信息在两个部分(深度信息部分与光学信息部分)都是竖直的,最终这两种竖直的上下文信息在水平方向上被融合。
我们注意到,对图像全局上下文信息的建模与二维循环方法很有关系,只需在输入图像上按照水平和竖直方向分别将网络展开。基于相同的想法,Byeon等人[80]提出了简单的二维的基于LSTM的架构,其中的输入图像被分割为无重叠的窗口,然后将其送入四个独立的LSTM记忆单元。该工作突出贡献是其计算复杂度较低、运行与单个CPU以及其模型的简单性。
另一种捕获全局信息的方法依赖于更大的输入窗口的使用,这样就可以建模更大范围内的上下文信息。但是,这也降低了图像的分辨率,而且引入了其他类似于窗口重叠等的问题。然而,Pinheiro等人[81] 引入了循环卷积神经网络(rCNN)来使用不同的窗口大小循环地训练,这相当于考虑了之前层中的预测信息。通过这种方法,预测出的标签将自动地平滑,从而使网络表现更好。
无向循环图(UCG)同样被用来建模图像上下文信息从而用于语义分割[82]。但是,RNN并不直接适用于UCG,为了解决这个问题,无向循环图被分解为了多个有向图(DAG)。在本方法中,图像在三个不同的层中被处理,分别是:CNN处理得到图像的特征映射,DAG-RNN对图像的上下文依赖信息进行建模,反卷积层将特征映射上采样。这个工作说明了RNN如何可以与图相结合,被用来建模长期范围内的上下文依赖,并超过已有的最优方法。
4.3 实例分割
实例分割被认为是语义分割的下一步,与此同时其相对于其他底层像素级别分割技术来说是最具挑战性的。该问题的主要目标是将同一类的不同物体分割为各个实例,这个处理过程的自动化操作并不直观,因此,实例的数量并不是预先知道的,对得到的预测的评估方法也不像语义分割一样达到像素级别。所以,这个问题至今仍有部分未被解决,但是考虑到其潜在的应用,目前领域研究者对此保有兴趣。实例标注为我们分析遮挡情况提供了额外的信息,还可以数出属于同一类的物体的数量,从而可以为执行抓取任务的机器人检测出特定的物体。还有更多的其他应用。
基于此目的,Hariharan等人[10]提出了一种同时检测和分割(SDS)的方法来提高现有方法的表现。这个方法首先使用了
一种自下而上的层次化图像分割方法,称之为多尺度可结合组(MCG)[101],以此得到建议的分割区域。对于每个区域,使用适合的区域CNN(R-CNN)[102]版本来提取特征,其是由MCG方法中给出的边界框微调而来,而不是由选择性的搜索以及前景区域得出。然后,对每个建议的区域使用线性支持向量机(SVM)在CNN顶层特征上进行分类。最后,为了进行调优,非最大抑制(NMS)方法被应用到了先前的区域建议上。
接下来,Pinheiro等人[83]提出了深度遮盖(DeepMask)模型,这是一种对物体给出提议的方法,基于单个的卷积网络。这个模型对于一个输入的分块预测出一个分割的覆盖区域,并给出这个块中包含物体的概率。这两个任务同时被一个单个的网络所学习和计算,他们共享多数的层,除了最后一层实现特定任务的层。
上述作者基于DeepMask架构(并由于其有效性将其作为模型的起点)又提出了一种全新的模型,应用了一种自上而下的调优策略[84]解决物体实例分割问题,并在准确率和速度等方面取得了更好的表现。该过程的目标是高效的将底层特征与更后边的层中产生的高层语义信息相结合,这个过程包含了堆叠在一起的不同的调优模块(每个模块后都跟着池化层),目的在于通过生成一个新的上采样物体编码来转化池化的影响。图18展示了SharpMask中的调优模块。
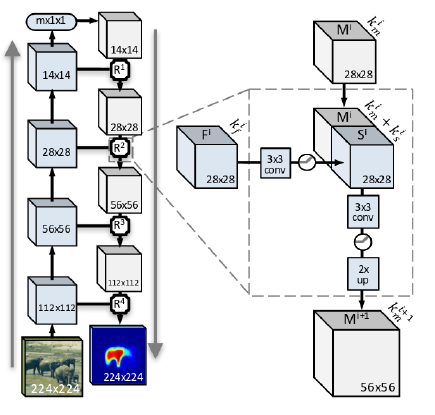
图 18 SharpMask中的自上而下逐步调优的结构,这种调优是通过将底层特征与上层中编码的高层特征想融合,来实现空间上丰富信息融合的目的。图来自[83]。
另一种方法由Zagoruyko等人[85]提出,使用快速R-CNN作为起点,使用DeepMask的物体提议而不是选择性搜索。这种结合多种方法的系统成为多路分类器,提高了COCO数据集上的表现,对于快速R-CNN做出了三处修改:使用整合的损失项改善了定位能力,使用中心区域提供上下文信息,以及最终跳过连接来为网络给出多尺度的特征。该系统相对于快速R-CNN取得了66%的提升。
可以看出,多数提到的方法依赖于现有的物体检测方法,这限制了模型的表现。即使这样,实例分割过程依然有很多问题未被解决,上述方法仅仅是这个有挑战性的方向的一小部分。
4.4 RGB-D数据(带有深度)
我们注意到,相当数量的语义分割的工作都是使用的照片式的数据,但是,廉价的RGB-D传感器促进了结构化信息的使用,这种传感器提供了有用的来自深度信息的几何线索。一些关注于RGB-D场景分割的工作已经在细粒度标注准确率上取得了进步,使用了深度信息而不仅仅是照片式的数据。利用深度信息进行分割更具挑战,由于不可预测的场景光照变化伴随着复杂遮挡导致的不完整的物体表示。但是,很多工作已经可以成功地使用深度信息提高准确率。
带有深度信息的图片并不能直接应用到专门处理照片式数据的模型中。深度数据需要被编码为每个像素点上的三个通道,就好像是RGB图像一样。有许多不同的技术,比如水平-高度-角度(HHA)[11]方法,这个方法被用于将深度信息编码为以下三个通道:水平方向的差距,距离“地面”的高度,以及局部表面法向与推知的重力方向的夹角。这样,我们便可以向为RGB数据设计的模型中输入深度信息,并通过从结构化信息中学习新的特征来提高模型的性能。一些方法如[99]便是基于这种编码技术的。
相关工作中还有一些工作,如同使用RGB-D数据的方法一样,利用一种多视角的方法来提高目前的单视角的工作的性能。
Zeng等人[103]提出了一种使用多视角RGB-D数据和深度学习技术的物体分割方法。多视角捕获的RGB-D数据被送入FCN网络中,得到每个图像每个像素点分别作为40类的概率。分割标签由阈值截断,该阈值为各个视角下平均概率的三倍。另外,本工作训练多个网络(AlexNet [14] 和VGG-16 [15])来提取特征,然后来评估使用深度信息的优势。本工作发现,加入深度信息并没有为分割效果带来任何的提高,而这可能是深度信息的噪声导致的。这个工作是在2016年亚马逊挑选竞赛(Amazon Picking Challenge)上被提出的,是自RGB图像数据独立地输入FCN网络以来,对多视角深度学习系统的一个主要的贡献。
Ma等人[104]提出了一个全新的物体类别分割方法,使用的也是多视角深度学习技术。多个视角是由运动的RGB-D摄像机拍摄的,在训练阶段,使用RGB-D SLAM技术获取摄像机轨迹,然后将RGB-D图像扭曲成与真实标注数据相同尺度以保证训练中的多视角的连续性。该方法基于FuseNet[105],其在语义分割过程中结合了RGB与深度图像,通过加入多尺度的损失最小化技术改善了原有工作的表现。
4.5 三维数据
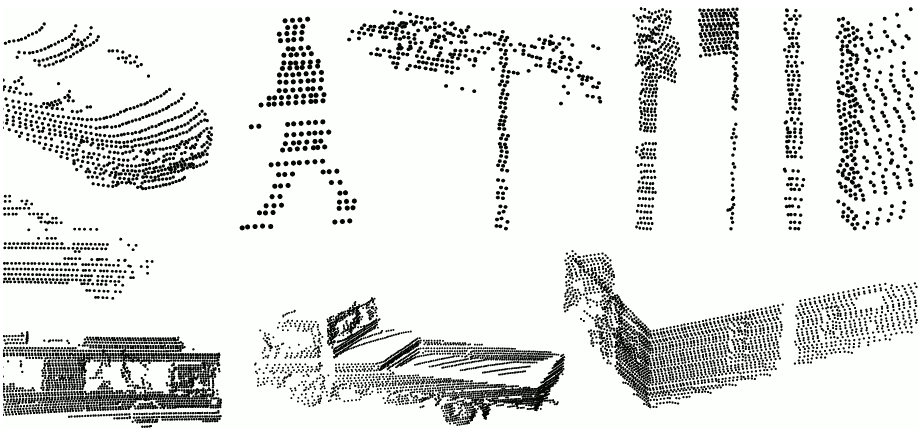
三维几何数据如点云或多边形网格数据等是一种非常实用的数据表示形式,原因在于其提供的附加的维度使得算法可以考虑更加丰富的空间信息,而这显然对分割很有帮助。但是,绝大多数成功的深度学习分割技术,尤其是基于CNN的,开始并不是被设计为解决上面提到的非结构化或者不规则的输入的。为了在卷积网络中促成参数共享以及其他优化形式,多数工作借助于三维立体网格或者映射来将非结构化或者不规则点云或网格转化为普通表示形式,然后再将其输入网络中。例如,Huang等人[86](图19)选取了一个点云,通过一个密集的立体网格对其进行分析,生成了一系列的占位体元,将其作为三维CNN的输入并为每个体元产生一个标签,最后,算法将标签映射回点云。虽然该方法已被成功地应用,其仍有不足之处如难以量化、丢失空间信息以及不必要的大规模表示等。因此,众多研究者致力于构造出一种可以直接处理非结构化三维点集或网格的深度模型。
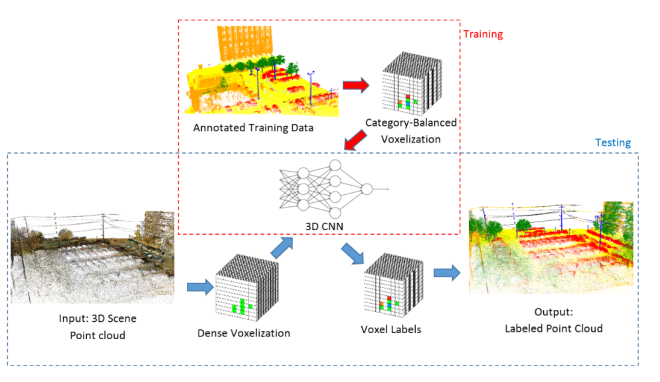
图 19 Huang等人[86]提出的基于3DCNN的点云语义标注系统。点云经过一个密集的体元化处理过程,CNN将处理得到的每一个体元,然后将结果映射回原来的点云。图片来自[86]。
PointNet[87]是一个先驱性的工作,提出了一种深度神经网络来将原始的点云作为输入,给出了一个同时进行分类和分割的联合的架构。图20展示了这种可以处理无序三维点集的双模块的网络。
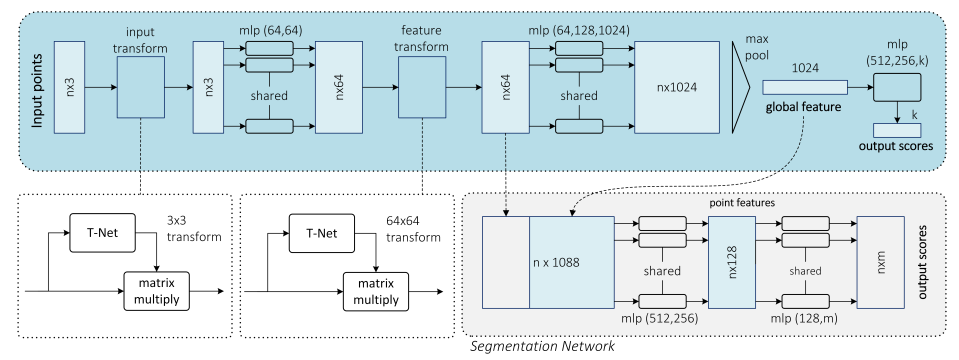
图 20 PointNet联合结构,用于分类和分割,图来自[87]。
我们可以看出,PointNet是一种与众不同的深度网络架构,因为其基于全连接层而不是卷积层。该模型分为两部分,分别负责分类和分割。分类子网络以点云为输入,采用一系列变换以及多层感知机(MLP)来生成特征,然后使用最大池化来生成全局特征以描述原输入的点云。另外的MLP将对这些全局特征进行分类,然后为每一个类得出分数。分割子网络将全局特征与分类网络生成的每个点的特征串联起来,然后应用另外的两个MLP来生成特征,并计算出每个点属于每一类的得分。
4.6 视频序列
我们观察到,单幅图像的分割已经取得了较大的进展,但是,当处理图像序列时,许多系统简单地使用逐帧处理的方法,这种方法比较奏效,也通常可以得到不错的结果,但是,这样处理是机器耗时的,因此通常不可行。另外,这种方法完全忽略了短期连续性以及一致性信息,而这些信息极可能会提高系统准确率并减少运行时间。
可争辩地,这方面最具标志性的工作便是Shelhamer等人[88]提出的时钟FCN网络。该网络改编自FCN,使用视频中的短期线索来减少推理时间,同时保证正确率。这种时钟的方法依赖于以下想法:特征速度,即网络中短期的特征变化率,其在各层中经过某帧时是变化的,因此来自浅层的特征变化的比来自深层的特征要快。基于此假设,各层可以被分为不同的阶段,于是可以按照其深度指定不同的更新率来进行处理。这样,由于其语义上的稳定性,深度特征可以在各帧被保持,也就节省了推理时间。图21展示了这种时钟FCN的结构。

图 21 三阶段的时钟FCN模型,以及其对应的时钟速率。图来自[88]。
值得注意的是,作者提出了两种更新速率的策略:固定的和自适应的。固定的策略直接为每个阶段设置一个常数时间来重新计算特征。自适应策略则使用数据驱动的方法来设置时钟,例如,时钟依赖于运动或语义改变的数量。图22展示了这种自适应策略的例子。
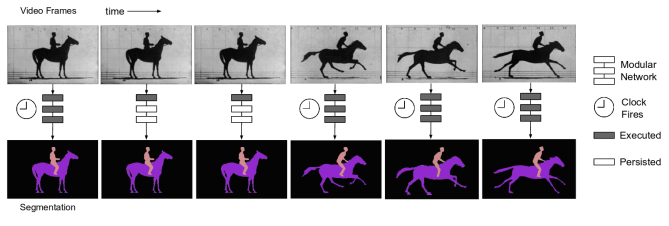
图 22 Shelhamer等人[88]提出的自适应的时钟方法。提取出的特征在静止的帧将会被保留,而在动态的帧时将会被重新计算。图来自[88]。
Zhang等人[106]采用了一种不同的方式,使用了3DCNN这种原本被设计来学习三维体数据特征的方法,以此来从多通道输入如视频片段中学出层次化的时空联合特征。与此同时,该工作将输入片段过分割为超体元,然后利用这些超体元图并将学得的特征嵌入其中,最终将在超体元图上应用graph-cut[107]来得到分割结果。
另一个重要的方法采用了三维卷积的思想,是由Tran等人[89]提出的一种深度的端对端的、体元对体元的预测系统。该方法将自己提出的三维卷积(C3D)网络应用于先前的工作[108]中,在最后添加了反卷积层以将其扩展为面向语义分割的算法。该系统将输入的视频片段分为包含16个帧的小片段,对每个片段单独进行预测。其主要的贡献在于其使用的三维卷积技术。这种卷积技术使用了三维的滤波器,适应了从多通道数据中学出的时空联合特征,图23展示了应用到多通道输入数据上的二维和三维卷积的不同之处,证明了视频分割情况下三维卷积核的有用性。
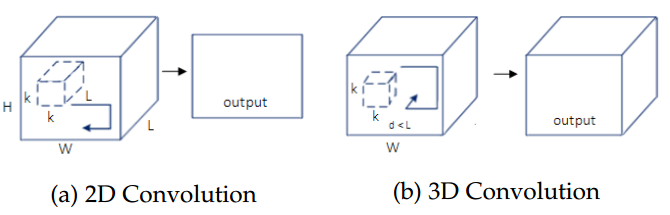
图 23 应用于一系列的帧的时候,二维和三维卷积的不同。(a)中,二维卷积在各个帧(多通道)的各个深度使用的是相同的权重,产生的是一个单一的图像。(b)三维卷积使用的是三维的滤波器,卷积后产生的是三维体元,因此保留了帧序列的时间信息。
5 讨论
前面的章节我们定性地回顾了现有的方法,也就是说,我们没有考虑任何定量的结果。在本章,我们从数学的角度讨论这些方法。首先,我们将描述最常用的评价指标,这些指标在以下三方面度量语义分割系统的表现:运行时间、占用内存、准确率。然后,我们将收集这些方法在最具代表性的数据集上运行的结果(以本文中所述的指标度量)。接着,我们将总结这些结果。最终,我们列举未来研究可能的方向,以及我们认为的该领域的重点之处。
5.1 评价指标
对于一个分割系统来说,要对该领域产生重要的影响,必须经过严格的评估。另外,评估过程中必须使用标准的众所周知的评价指标,这样对于现有方法来说才是公平的。进一步的,必须对方法的各个方面进行评估,然后才能断言该系统的有效性,这些方面包括运行时间、占用内存、准确率等。由于对目标或上下文的依赖性,某些指标可能会更加重要,也就是说,在一个实时处理的应用中,可能会为了运行速度而牺牲准确率。但是,为了科学的严谨性,提供该方法的所有可能的评价指标度量是极其重要的。
5.1.1 运行时间
但是,考虑到可重复性以及对后续研究者的帮助,有必要在提供运行时间的同时给出系统运行的硬件信息,以及基准方法的配置。如果合理地做到了这些,后续的研究者们将可以判断出这个方法是否对其真实应用实用,并且可以使用相同的环境进行公平的对比。
5.1.2 占用存储空间
内存占用是分割问题中的另一个重要的考量。虽然不及运行时间那样受限,因为扩充容量一般是可行的,其仍然作为系统的一个限制因素。在某些场景下,例如机器人平台上的板载芯片,内存并不会像高性能服务器中一样充裕。即使是普遍用来加速深度网络的高端的显卡(GPU)也不会搭载大容量的存储空间。基于这些考虑,以及与在时间问题上相似的对于实际应用的考虑,详细记录网络所占用的最大及平均存储空间是极其有用的。
5.1.3 准确率
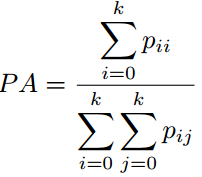
已经提出了许多用于评估语义分割问题准确率的评价指标,这些指标通常是像素级准确率及IoU的变体。我们报告了语义分割方面最常用的评价指标,用来度量逐个像素标注类的方法的表现。为便于解释,我们给出下述标号的意思:我们假设共有k+1类,(从L0到Lk,包括一个空类或者是背景),pij是本属于第i类却被分到第j类的像素数量。也就是说,pii代表的是分类正确的正例数量,其他几个p值类似。
像素准确率(PA):这是最简单的指标,仅仅计算正确分类的像素数量与所有像素数量的比值。
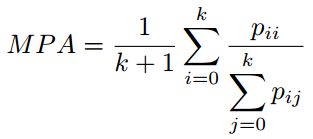
像素准确率平均值(MPA):对PA的轻微改进版本,正确分类像素的比例是按类计算的,最终由类总数取平均。
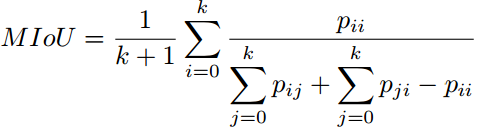
平均交并比(MIoU):这是用于分割问题的标准评价指标,其计算的是两个集合的交集与其并集的重合比例,在本问题中,其计算的便是真实分割与系统预测的分割之间的交并比。这个比例可以被重新定义为真实正例(交集)的数量除以总数量(包括真实正例、错误负例、以及错误正例(并集))。IoU也是按类计算最后取平均。
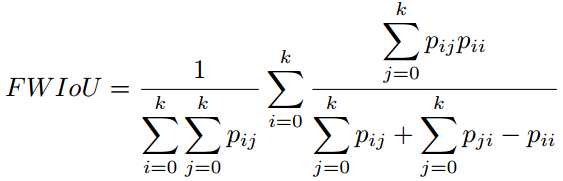
频率加权交并比(FWIoU):是对MIoU的改进,对每个类别按照重要性进行加权,重要性来自于其出现的频率。
对于上述的所有指标,MIoU是最常用的一个,因为它最具代表性,且非常简单。许多竞赛以及研究者使用该指标来报告其结果。
5.2 结果
如前所述,第四章根据各自的任务给出了各个方法的功能描述,现在,我们收集了这些方法对应论文中报告的所有的量化的结果。这些结果按照其输入数据集的不同分为三个部分:二维RGB数据、2.5维RGB-D数据以及三维体数据或视频序列数据。
我们选用了最常用的数据集,值得注意的是,这些论文在报告结果是并不统一。虽然多数的方法试图以标准数据集评估其方法,并尽量提供充足的信息来保证其结果可以重现,以及尽量使用最常用的评价指标来评价,但很多其他方法并没有这样做。这也使得公平地对比这些方法变得很困难。
另外,我们发现很少有作者提供除准确率之外的其他评价信息。尽管其他指标也是重要的,多数论文并没有提供其运行时间或者占用内存的信息。有时候这些信息有,但是必要的程序再现性信息又没有给出,所以,无法得知这些方法的配置信息。
5.2.1 RGB图像
对于二维图像这一类,我们选取了7个数据集:PASCAL VOC 2012、PASCAL上下文、PASCAL人物、CamVid、CityScapes、斯坦福背景以及SiftFlow数据集。这些数据集涵盖了多种情况和优化目标。
首先是,值得争议的最终的数据集,也是绝大多数方法都会使用的PASCAL VOC 2012数据集。表3给出了提供该数据集上结果的方法在其测试集上的准确率。这个结果集展现了一个清晰的上升趋势(从第一个提出的方法SegNet以及原始FCN开始),直到最复杂的模型如CRFasRNN以及目前最优的DeepLab(IoU为79.70)。
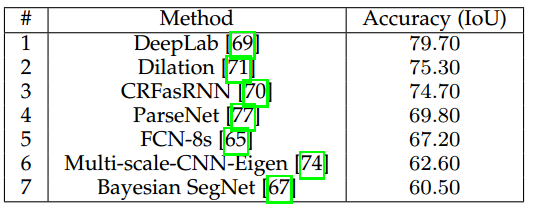
表 3 PASCAL VOC 2012 上的表现结果
除了最常见的VOC数据集,我们还收集了在上下文数据集上各方法的准确率,表4给出了结果统计,DeepLab依然是最高(IoU为45.70)。
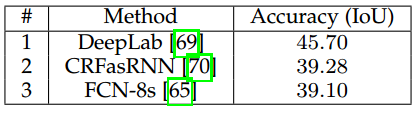
表 4 PASCAL上下文数据集上的表现结果
另外,我们考虑了PASCAL人物部分,结果见表5。在本数据集上仅有DeepLab进行了实验,结果IoU是64.94。

表 5 PASCAL人物部分数据集的表现结果
上面考虑了通用目标的数据集如PASCAL VOC,接下来我们收集了两种最重要的城市驾驶数据集上的结果。表6给出了CamVid数据集上的方法的结果,一种基于RNN的方法即DAG-RNN取得了最优的IoU为91.60。
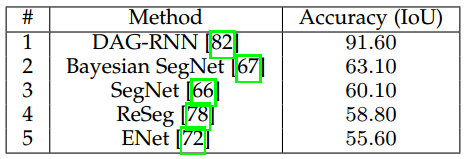
表 6 CamVid数据集上的表现结果
表7给出了更具挑战性且目前更常用的数据集及CityScape数据集上的结果。其表现出的趋势与PASCAL VOC上的相似,DeepLab以IoU70.40领跑。
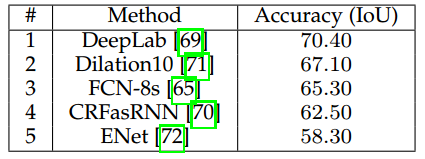
表 7 CityScape数据集上的结果
表8给出了多种循环网络在斯坦福背景数据集上的结果,rCNN取得了最好的结果,其最大IoU为80.20。
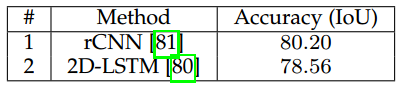
表 8 斯坦福背景数据集上的结果
最后,其它常见数据集如SiftFlow等的结果在表9中展示。这个数据集同样被循环方法所霸占,尤其是DAG-RNN取得了最好的IoU85.30。
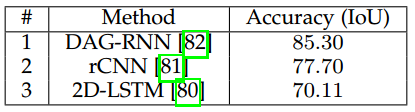
表 9 SiftFlow上的结果
5.2.2 2.5维数据
对于2.5为数据这一分类,也就是数据中不仅包含RGB三个通道,还包含深度信息,我们选择了三个数据集进行分析,分别是SUN-RGB-D、NYUDv2、SUN3D。表10、11、12分别给出了这三个数据集上的结果。

表 10 SUN-RGB-D上的结果

表 11 NYUDv2上的结果

表 12 SUN3D上的结果
5.2.3 三维数据
选用了两个三维数据集:ShapeNet Part和Stanford-2D-3D-S。表13和表14分别展示了其结果。

表 13 ShapeNet Part数据集上的结果

表 14 Stanford-2D-3D-S数据集上的结果
5.2.4 序列数据
最后一个分类便是视频或序列数据数据集。我们选取了两个适合于序列分割的数据集:CityScapes和YouTube-Objects。表15和表16分别展示了结果。

表 15 CityScapes数据集上的结果

表 16 Youtube-Objects数据集上的结果
5.3 总结
根据这些结果,我们可以得出许多结论。最重要的结论与可重现性有关。正如我们所观察到的一样,许多方法报告了非标准数据集上的结果,或者有些方法根本没有进行测试,这使其不可能参与对比。另外,有些方法没有描述其实验的配置,或者没有提供可执行的代码,于是这也使得重现起来非常困难。各个方法都应在标准数据集上评估其结果,尽可能全地描述其训练过程,同时公开其模型与参数。
另一个发现便是,很多方法缺少对运行时间与占用内存的评价。几乎没有论文报告这两种信息,这些也都面临着无法重现的问题。多数方法关注准确率而忽视了时间与空间效率,这导致了其在分析这些问题上的空缺。但是,但其被应用时,这些问题是很重要的。实际上,多数算法将被应用于植入型设备上,如自动驾驶汽车、无人机、机器人等,这些应用都受限于计算消耗以及内存空间。
考虑到方法各自的结果,我们认为DeepLab是最可靠的方法,其在几乎每个RGB图像数据集上都远远超过了其他方法。2.5维和多模态数据集上,循环的网络如LSTM-CF起到了主导作用。三维数据的分割问题仍有很长的路要走,PointNet为解决无序点云的分割问题开辟了道路。最后,处理视频序列同样作为一个待开发区域,至今并没有明确的方向,但是,时钟卷积神经网络凭借其效率和准确率还是成为了最可靠的方法。三维卷积是值得关注的,由于其强大的功能及对多通道输入数据的可扩展性,且三维卷积可以同时捕获时间空间信息。
5.4 未来研究方向
基于以上回顾过的代表了目前最高水平的方法,我们给出了一系列的未来研究的可能的方向。
1)三维数据集:充分利用三维数据的一些方法已经开始出现,但是,即使是最新的方案,仍然缺乏对于最重要的构成成分之一即数据的考虑。目前急需一个大规模三维语义分割数据集,但这相对于其低维部分来说是较难创建的。虽然已经有了一些不错的工作,仍然需要更多、更好、更富变化的数据集的出现。值得注意的是,真实世界的三维数据是极其重要的,因为目前几乎所有的工作都是使用的合成数据集。三维数据重要性的一个证明便是,2018年ILSVRC将会创建三维数据。
2)序列数据集:三维数据集上大规模数据集缺乏的问题同样影响到了视频序列分割问题。目前仅有少数几个数据集是基于序列的,这些数据集对于利用时间序列信息的方法的发展很有利。从本质上将二维及三维高质量数据联系起来必将引领新的研究方向。
3)使用图卷积网络(GCN)对点云进行分割:如之前所述,处理三维数据如点云等目前尚未解决,由于点云内在的无序性及非结构性,传统的架构如CNN等不能直接予以应用,除非使用某种离散化手段使其结构化。一个靠谱的研究方向便致力于将点云处理为图,然后在其上应用卷积[109,110,111]。这种做法的好处便是在不量化数据的基础上保留了每个维度上的空间信息。
4)上下文知识:虽然FCN是语义分割领域中的一种坚实的方法,但是FCN网络缺乏对于上下文等特征的建模,而这些信息有可能会提高准确率。将CRF重写为RNN来创造一种端对端的解决方法看起来是一个靠谱的方法,可以提高真实生活场景下的性能。多尺度及特征融合方法也取得了较大的进展。总之,这些方法已经取得了不小的进步,但是仍然有许多问题亟待解决。
5)实时分割:在很多应用场景下,准确率是重要的,但是,能够处理达到常见的摄像机帧率(至少25帧每秒)的输入速度也是很关键的。目前多数的方法远远达不到这个帧率,比如,FCN-8处理一张低分辨率的PASCAL VOC数据集中的图像需要100ms,同时,CRFasRNN需要500ms。因此,接下来几年,我们期待会有一系列的工作关注于实时处理的限定,这些工作将必须在准确率与运行时间之间寻求一个平衡。
6)存储空间:某些平台受限于其存储空间。分割网络一般需要较大的存储空间,从而可以同时进行推理与训练。为了适应各种设备,网络必须要简单。虽然这可以通过降低复杂性(一般会牺牲准确率)来简单地实现,但是还是可以采取另外的办法。剪枝是一种靠谱的研究方向,可以用来简化网络,使得网络在保留多数信息的同时变得轻量化,也因此同时保留了原网络的准确率。
7)序列数据的时间一致性:一些方法解决了视频或序列分割的问题,但是他们有些未利用时间序列信息来提高准确率或效率。然而,没有一种方法解决了一致性的问题。对于一个应用在视频流上的分割系统来说,一致性信息是重要的,不仅可以逐帧地处理数据,还可以对整个片段的处理保持一致,而不需要通过平滑为序列预测出的像素级别的标签而产生人工的信息。
8)多视角整合:在最近提出的分割网络上应用多视角信息目前仅仅限于RGB-D摄像机相关的场景,尤其是致力于单一物体分割的情况。
6 总结
就我们所知,本文是第一篇对利用深度学习技术的语义分割技术的综述。对比其他综述文章,本文致力于深度学习这一正在崛起的研究领域,涵盖了最先进的相关工作。我们对语义分割进行了公式化定义,同时为读者提供了必要的深度学习应用于语义分割任务的背景知识信息。我们涵盖了相关工作中的方法和数据集,提供了对于28个数据集和27个方法的综述。我们详细介绍了数据集的情况,阐述了这些数据集的目的和特点,这样,研究者便可以轻松地挑选出最适合他们问题的数据集。方法按照两个方面进行综述:其贡献和原始结果即准确率。我们还以表格的形式提供了数据集和方法的总结,按照多种指标对其进行了分类。最后,我们讨论了这些结果,提供了对未来工作方向的看法以及该领域一些开放问题的讨论。总之,语义分割问题已经被很多不错的方法所解决,但是仍然存在着开放的问题,这些问题一旦解决将会对真实场景的应用产生较大的帮助。另外,深度学习技术被证明了对于解决语义分割问题的强大性,因此,我们期待接下来几年各种创新的不断涌现。
0002,简介
http://blog.geohey.com/ji-suan-ji-shi-jue-zhi-yu-yi-fen-ge/
计算机视觉之语义分割
2017年10月11日
人工智能被认为是第四次工业革命,google,facebook等全球顶尖、最有影响力的技术公司都将目光转向AI,虽然免不了存在泡沫,被部分媒体夸大宣传,神经网络在图像识别,语音识别,自然语言处理,无人车等方面的贡献是毋庸置疑的,随着算法的不断完善,部分垂直领域的研究已经落地应用。
在计算机视觉领域,目前神经网络的应用主要有图像识别,目标定位与检测,语义分割。图像识别就是告诉你图像是什么,目标定位与检测告诉你图像中目标在哪里,语义分割则是从像素级别回答上面两个问题。因为项目需要对卫星遥感影像中的小麦和玉米进行语义分割,这几天在做相关方向的研究,下面给大家简单介绍下语义分割的相关知识。
语义分割是什么
图像语义分割(semantic segmentation),从字面意思上理解就是让计算机根据图像的语义来进行分割,例如让计算机在输入下面左图的情况下,能够输出右图。语义在语音识别中指的是语音的意思,在图像领域,语义指的是图像的内容,对图片意思的理解,比如左图的语义就是三个人骑着三辆自行车;分割的意思是从像素的角度分割出图片中的不同对象,对原图中的每个像素都进行标注,比如右图中粉红色代表人,绿色代表自行车。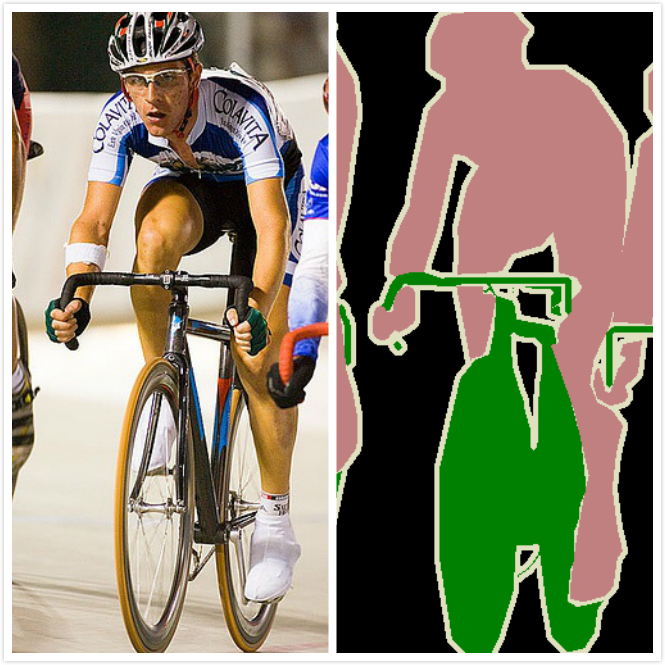
语义分割当前应用
目前语义分割的应用领域主要有:
- 地理信息系统
- 无人车驾驶
- 医疗影像分析
- 机器人等领域
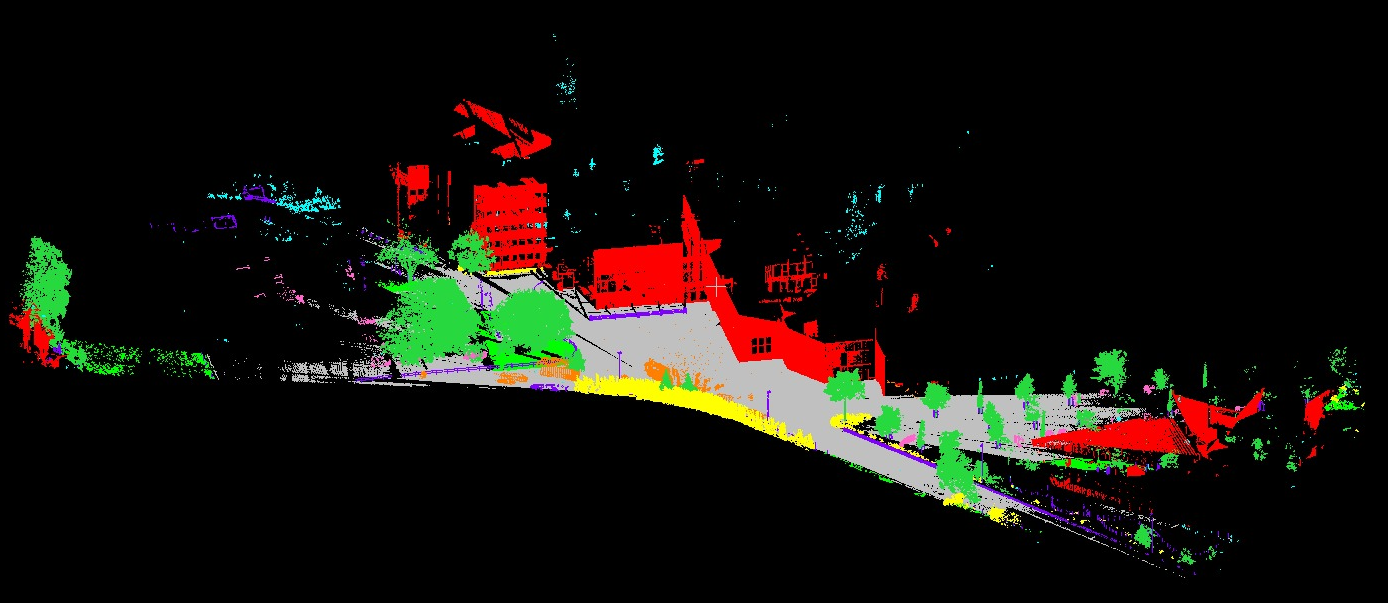
地理信息系统:可以通过训练神经网络让机器输入卫星遥感影像,自动识别道路,河流,庄稼,建筑物等,并且对图像中每个像素进行标注。(下图左边为卫星遥感影像,中间为真实的标签,右边为神经网络预测的标签结果,可以看到,随着训练加深,预测准确率不断提升。使用ResNet FCN网络进行训练)
无人车驾驶:语义分割也是无人车驾驶的核心算法技术,车载摄像头,或者激光雷达探查到图像后输入到神经网络中,后台计算机可以自动将图像分割归类,以避让行人和车辆等障碍。
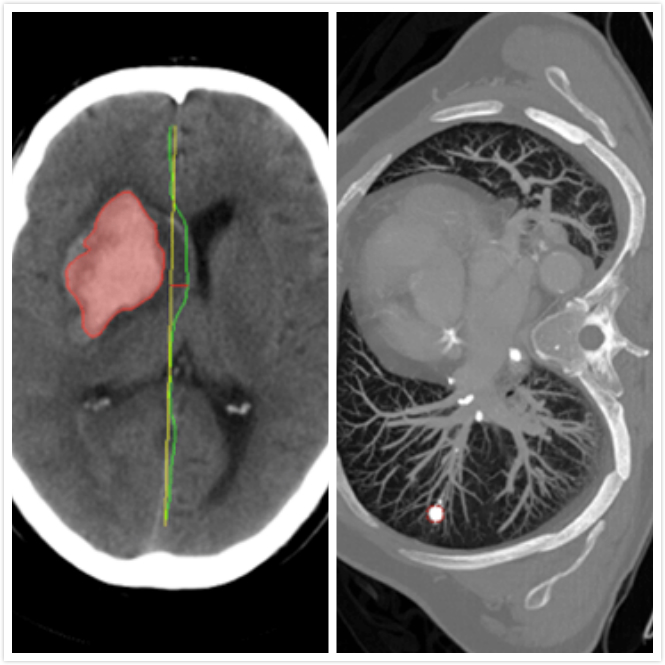
医疗影像分析:随着人工智能的崛起,将神经网络与医疗诊断结合也成为研究热点,智能医疗研究逐渐成熟。在智能医疗领域,语义分割主要应用有肿瘤图像分割,龋齿诊断等。(下图分别是龋齿诊断,头部CT扫描紧急护理诊断辅助和肺癌诊断辅助)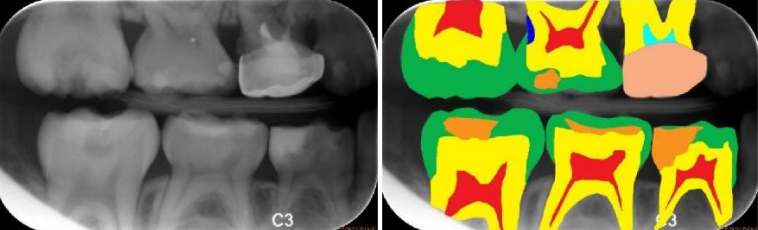
语义分割数据集
在“数据,算法,计算力”这AI发展的三大驱动力中,眼下最重要的就是数据,数据集在人工智能中有着举足轻重的地位,具体根据不同的应用领域,目前的数据集主要有:
- Pascal VOC系列: http://host.robots.ox.ac.uk/pascal/VOC/voc2012/ 通常采用PASCAL VOC 2012,最开始有1464 张具有标注信息的训练图片,2014 年增加到10582张训练图片。主要涉及了日常生活中常见的物体,包括汽车,狗,船等20个分类。
- Microsoft COCO: http://link.zhihu.com/?target=http%3A//mscoco.org/explore/ 一共有80个类别。这个数据集主要用于实例级别的分割(Instance-level Segmentation)以及图片描述Image Caption)。
- Cityscapes: https://www.cityscapes-dataset.com/ 适用于汽车自动驾驶的训练数据集,包括19种都市街道场景:road、side-walk、building、wal、fence、pole、traficlight、trafic sign、vegetation、terain、sky、person、rider、car、truck、bus、train、motorcycle 和 bicycle。该数据库中用于训练和校验的精细标注的图片数量为3475,同时也包含了 2 万张粗糙的标记图片。
语义分割中的深度学习技术
- 全卷积神经网络 FCN(2015)
论文:Fully Convolutional Networks for Semantic Segmentation FCN 所追求的是,输入是一张图片是,输出也是一张图片,学习像素到像素的映射,端到端的映射,网络结构如下图所示: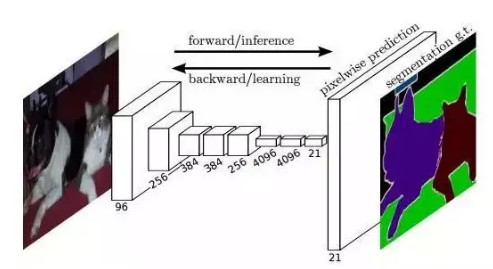
全卷积神经网络主要使用了三种技术:
- 卷积化(Convolutional)
- 上采样(Upsample)
- 跳跃结构(Skip Layer)
卷积化(Convolutional) 卷积化即是将普通的分类网络,比如VGG16,ResNet50/101等网络丢弃全连接层,换上对应的卷积层即可。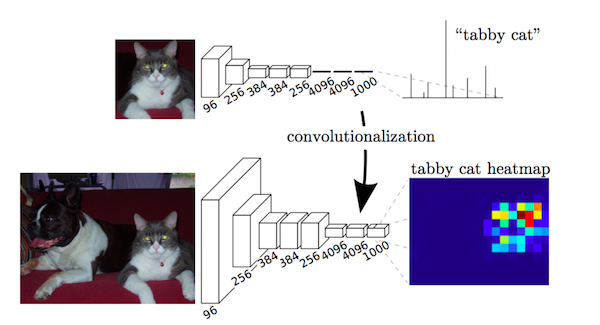
上采样(Upsample) 有的说叫conv_transpose更为合适。因为普通的池化会缩小图片的尺寸,比如VGG16 五次池化后图片被缩小了32倍。为了得到和原图等大的分割图,我们需要上采样/反卷积。反卷积和卷积类似,都是相乘相加的运算。只不过后者是多对一,前者是一对多。而反卷积的前向和后向传播,只用颠倒卷积的前后向传播即可。图解如下:
跳跃结构(Skip Layer) 这个结构的作用就在于优化结果,因为如果将全卷积之后的结果直接上采样得到的结果是很粗糙的,所以作者将不同池化层的结果进行上采样之后来优化输出。具体结构如下: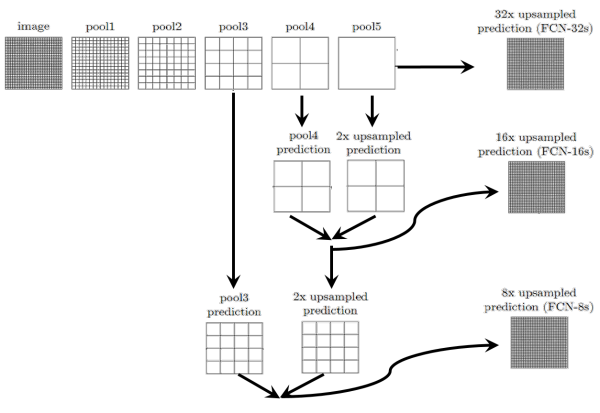 而不同上采样结构得到的结果对比如下:
而不同上采样结构得到的结果对比如下:

这是第一种结构,也是深度学习应用于图像语义分割的开山之作,获得了CVPR2015的最佳论文。但还是无法避免有很多问题,比如,精度问题,对细节不敏感,以及像素与像素之间的关系,忽略空间的一致性等,后面的研究极大的改善了这些问题。
-
SegNet(2015) 论文:A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation 主要贡献:将最大池化指数转移至解码器中,改善了分割分辨率。
-
空洞卷积(2015) 论文:Multi-Scale Context Aggregation by Dilated Convolutions主要贡献:使用了空洞卷积,这是一种可用于密集预测的卷积层;提出在多尺度聚集条件下使用空洞卷积的“背景模块”。
-
DeepLab(2016) 论文:DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs 主要贡献:使用了空洞卷积;提出了在空间维度上实现金字塔型的空洞池化atrous spatial pyramid pooling(ASPP);使用了全连接条件随机场。
参考: 1. https://www.azavea.com/blog/2017/05/30/deep-learning-on-aerial-imagery/
2.https://zhuanlan.zhihu.com/p/22308032
0003,发展
语义分割中的深度学习方法全解:从FCN、SegNet到各版本DeepLab
图像语义分割就是机器自动从图像中分割出对象区域,并识别其中的内容。

量子位今天推荐的这篇文章,回顾了深度学习在图像语义分割中的发展历程。
发布这篇文章的Qure.ai,是一家用深度学习来读取医学影像的公司,他们在官方博客上梳理了语义分割中的深度学习方法。
他们希望通过这份介绍,能让大家了解这个已经在自然图像处理比较成熟、但是在医学图像中仍需发展的新兴技术。
作者Sasank Chilamkurthy三部分介绍了语义分割相关研究:
以下内容编译自Qure.ai官方博客:
语义分割是什么?
语义分割方法在处理图像时,具体到像素级别,也就是说,该方法会将图像中每个像素分配到某个对象类别。下面是一个具体案例。
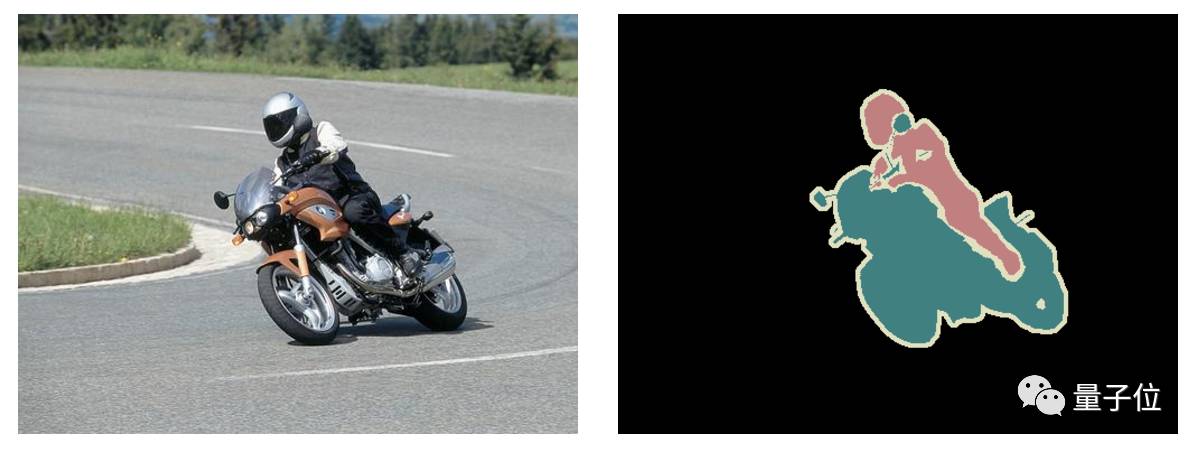
△左边为输入图像,右边为经过语义分割后的输出图像。
该模型不仅要识别出摩托车和驾驶者,还要标出每个对象的边界。因此,与分类目的不同,相关模型要具有像素级的密集预测能力。
目前用于语义分割研究的两个最重要数据集是VOC2012和MSCOCO。
VOC2012:
http://host.robots.ox.ac.uk/pascal/VOC/voc2012/
MSCOCO:
http://mscoco.org/explore/
有哪些方法?
在深度学习应用到计算机视觉领域之前,研究人员一般使用纹理基元森林(TextonForest)或是随机森林(Random Forest)方法来构建用于语义分割的分类器。
卷积神经网络(CNN)不仅能很好地实现图像分类,而且在分割问题中也取得了很大的进展。
最初,图像块分类是常用的深度学习方法,即利用每个像素周围的图像块分别将各像素分成对应的类别。其中,使用图像块的主要原因是分类网络通常具有全连接层,其输入需为固定大小的图像块。
2014年,加州大学伯克利分校的Long等人提出的完全卷积网络(Fully Convolutional Networks),推广了原有的CNN结构,在不带有全连接层的情况下能进行密集预测。
这种结构的提出使得分割图谱可以生成任意大小的图像,且与图像块分类方法相比,也提高了处理速度。在后来,几乎所有关于语义分割的最新研究都采用了这种结构。
除了全连接层结构,在分割问题中很难使用CNN网络的另一个问题是存在池化层。池化层不仅能增大上层卷积核的感受野,而且能聚合背景同时丢弃部分位置信息。然而,语义分割方法需对类别图谱进行精确调整,因此需保留池化层中所舍弃的位置信息。
研究者提出了两个不同形式的结构来解决这个问题。
第一种方法是编码器-解码器(encoder-decoder)结构。其中,编码器使用池化层逐渐缩减输入数据的空间维度,而解码器通过反卷积层等网络层逐步恢复目标的细节和相应的空间维度。从编码器到解码器之间,通常存在直接的信息连接,来帮助解码器更好地恢复目标细节。在这种方法中,一种典型结构为U-Net网络。

△一种典型的编码器-解码器结构U-Net
第二种方法使用了称作空洞卷积的结构,且去除了池化层结构。

△空洞卷积,当比率为1时,即为经典的卷积结构。
条件随机场(Conditional Random Field,CRF)方法通常在后期处理中用于改进分割效果。CRF方法是一种基于底层图像像素强度进行“平滑”分割的图模型,在运行时会将像素强度相似的点标记为同一类别。加入条件随机场方法可以提高1~2%的最终评分值。
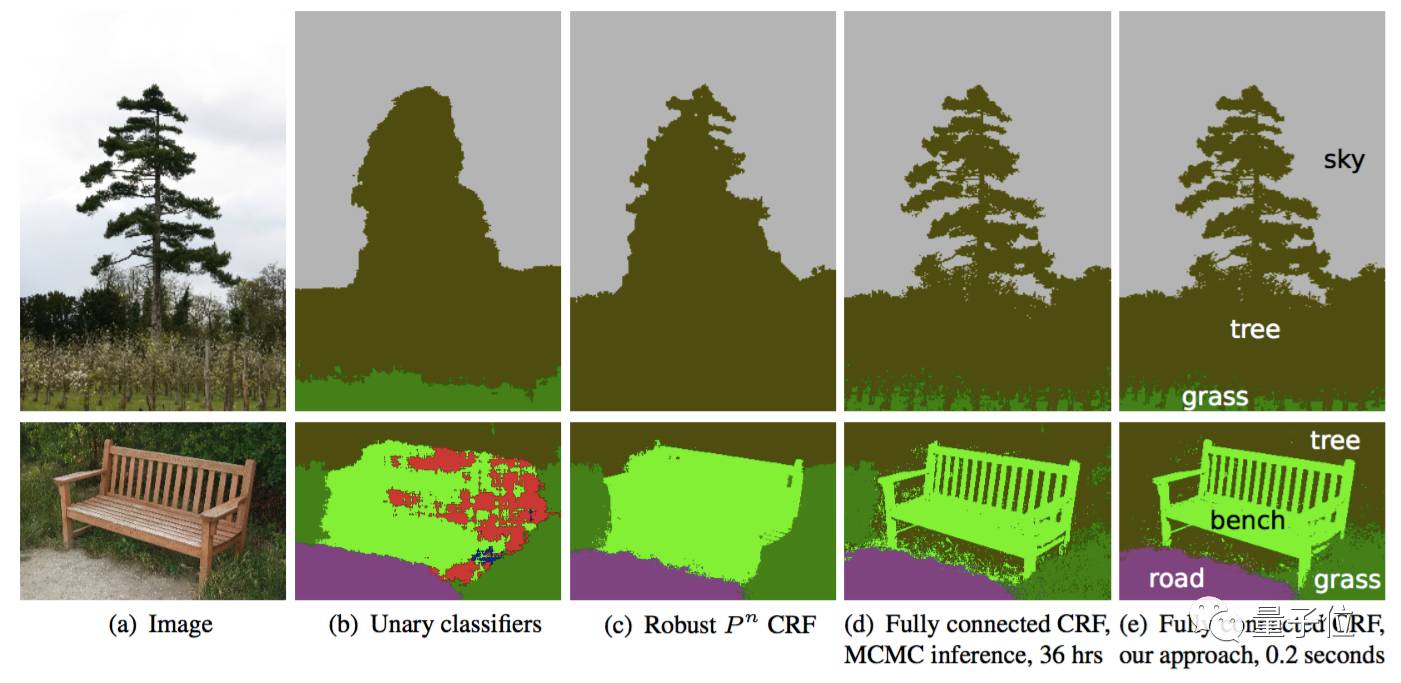
△发展中的CRF方法效果。b图中将一维分类器作为CRF方法的分割输入;c、d、e图为CRF方法的三种变体;e图为广泛使用的一种CRF结构。
接下来,我们会梳理一些代表性论文,来介绍从FCN网络开始的分割结构演变历程。
这些结构都使用了VOC2012数据集来测试实际效果。
一些有趣的研究
接下来将按照论文的发表顺序来介绍以下论文:
1.FCN网络;
2.SegNet网络;
3.空洞卷积(Dilated Convolutions);
4.DeepLab (v1和v2);
5.RefineNet;
6.PSPNet;
7.大内核(Large Kernel Matters);
8.DeepLab v3;
对于上面的每篇论文,下面将会分别指出主要贡献并进行解释,也贴出了这些结构在VOC2012数据集中的测试分值IOU。
FCN
论文:
Fully Convolutional Networks for Semantic Segmentation
于2014年11月14日提交到arvix
https://arxiv.org/abs/1411.4038
主要贡献:
-
将端到端的卷积网络推广到语义分割中;
-
重新将预训练好的Imagenet网络用于分割问题中;
-
使用反卷积层进行上采样;
-
提出了跳跃连接来改善上采样的粗糙程度。
具体解释:
本文的关键在于:分类网络中的全连接层可以看作是使用卷积核遍历整个输入区域的卷积操作。
这相当于在重叠的输入图像块上评估原始的分类网络,但是与先前相比计算效率更高,因为在图像块重叠区域,共享计算结果。
尽管这种方法并不是这篇文章中所特有的,还有一篇关于overfeat的文章也使用了这种思想,但是确实显著提高了在VOC2012数据集上的实际效果。
△用卷积运算实现的全连接层结构
在将VGG等预训练网络模型的全连接层卷积化之后,由于CNN网络中的池化操作,得到的特征图谱仍需进行上采样。
反卷积层在进行上采样时,不是使用简单的双线性插值,而是通过学习实现插值操作。此网络层也被称为上卷积、完全卷积、转置卷积或是分形卷积。
然而,由于在池化操作中丢失部分信息,使得即使加上反卷积层的上采样操作也会产生粗糙的分割图。因此,本文还从高分辨率特性图谱中引入了跳跃连接方式。
| 分值 | 评论 | 来源 |
|---|---|---|
| 62.2 | 无 | 排行榜 |
| 67.2 | 增大动量momentum(原文未描述) | 排行榜 |
个人评论:
本文的研究贡献非常重要,但是最新的研究已经很大程度地改进了这个结果。
SegNet
论文:
SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation
于2015年11月2日提交到arvix
https://arxiv.org/abs/1511.00561
主要贡献:
将最大池化指数转移至解码器中,改善了分割分辨率。
具体解释:
在FCN网络中,通过上卷积层和一些跳跃连接产生了粗糙的分割图,为了提升效果而引入了更多的跳跃连接。
然而,FCN网络仅仅复制了编码器特征,而Segnet网络复制了最大池化指数。这使得在内存使用上,SegNet比FCN更为高效。
△SegNet网络结构
| 分值 | 评论 | 来源 |
|---|---|---|
| 59.9 | 无 | 排行榜 |
个人评论:
FCN网络和SegNet网络都是最先出现的编码器-解码器结构,但是SegNet网络的基准分值还不能满足可实际使用的需求。
空洞卷积
论文:
Multi-Scale Context Aggregation by Dilated Convolutions
于2015年11月23日提交到arvix
https://arxiv.org/abs/1511.07122
主要贡献:
-
使用了空洞卷积,这是一种可用于密集预测的卷积层;
-
提出在多尺度聚集条件下使用空洞卷积的“背景模块”。
具体解释:
池化操作增大了感受野,有助于实现分类网络。但是池化操作在分割过程中也降低了分辨率。
因此,该论文所提出的空洞卷积层是如此工作的:

△空洞卷积示意图
空洞卷积层在不降低空间维度的前提下增大了相应的感受野指数。
在接下来将提到的DeepLab中,空洞卷积被称为多孔卷积(atrous convolution)。
从预训练好的分类网络中(这里指的是VGG网络)移除最后两个池化层,而用空洞卷积取代了随后的卷积层。
特别的是,池化层3和池化层4之间的卷积操作为空洞卷积层2,池化层4之后的卷积操作为空洞卷积层4。
这篇文章所提出的背景模型(frontend module)可在不增加参数数量的情况下获得密集预测结果。
这篇文章所提到的背景模块单独训练了前端模块的输出,作为该模型的输入。该模块是由不同扩张程度的空洞卷积层级联而得到的,从而聚集多尺度背景模块并改善前端预测效果。
| 分值 | 评论 | 来源 |
|---|---|---|
| 71.3 | 前端 | 空洞卷积论文 |
| 73.5 | 前端+背景 | 同上 |
| 74.7 | 前端+背景+ CRF | 同上 |
| 75.3 | 前端+背景+ CRF - RNN | 同上 |
个人评论:
需要注意的是,该模型预测分割图的大小是原图像大小的1/8。这是几乎所有方法中都存在的问题,将通过内插方法得到最终分割图。
DeepLab(v1和v2)
论文1:
Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs
于2014年12月22日提交到Arvix
https://arxiv.org/abs/1412.7062
论文2:
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs
于2016年6月2日提交到Arxiv
https://arxiv.org/abs/1606.00915
主要贡献:
-
使用了空洞卷积;
-
提出了在空间维度上实现金字塔型的空洞池化atrous spatial pyramid pooling(ASPP);
-
使用了全连接条件随机场。
具体解释:
空洞卷积在不增加参数数量的情况下增大了感受野,按照上文提到的空洞卷积论文的做法,可以改善分割网络。
我们可以通过将原始图像的多个重新缩放版本传递到CNN网络的并行分支(即图像金字塔)中,或是可使用不同采样率(ASPP)的多个并行空洞卷积层,这两种方法均可实现多尺度处理。
我们也可通过全连接条件随机场实现结构化预测,需将条件随机场的训练和微调单独作为一个后期处理步骤。
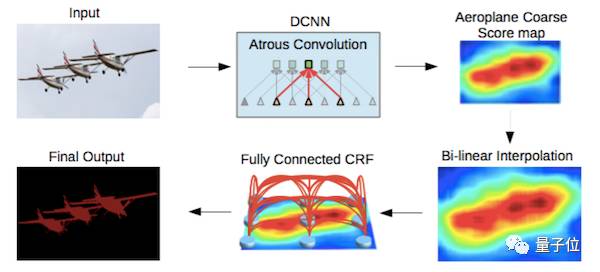
△DeepLab2网络的处理流程
| 分值 | 评论 | 来源 |
|---|---|---|
| 79.7 | ResNet-101 + 空洞卷积 + ASPP + CRF | 排行榜 |
论文:
RefineNet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation
于2016年11月20日提交到Arxiv
https://arxiv.org/abs/1611.06612
主要贡献:
-
带有精心设计解码器模块的编码器-解码器结构;
-
所有组件遵循残差连接的设计方式。
具体解释:
使用空洞卷积的方法也存在一定的缺点,它的计算成本比较高,同时由于需处理大量高分辨率特征图谱,会占用大量内存,这个问题阻碍了高分辨率预测的计算研究。
DeepLab得到的预测结果只有原始输入的1/8大小。
所以,这篇论文提出了相应的编码器-解码器结构,其中编码器是ResNet-101模块,解码器为能融合编码器高分辨率特征和先前RefineNet模块低分辨率特征的RefineNet模块。
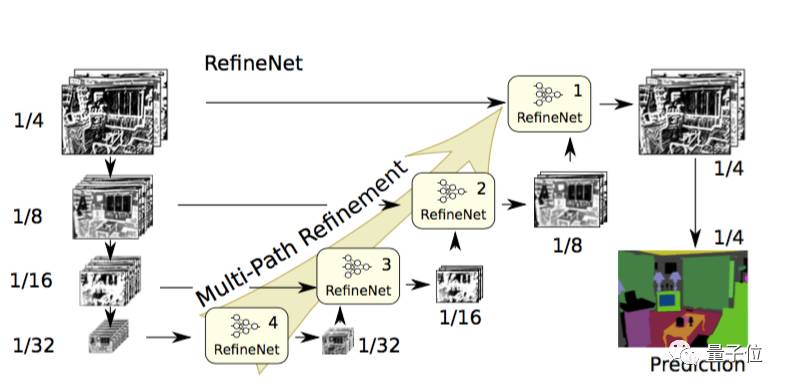
△RefineNet网络结构
每个RefineNet模块包含一个能通过对较低分辨率特征进行上采样来融合多分辨率特征的组件,以及一个能基于步幅为1及5×5大小的重复池化层来获取背景信息的组件。
这些组件遵循恒等映射的思想,采用了残差连接的设计方式。

△RefineNet模块
| 分值 | 评论 | 来源 |
|---|---|---|
| 84.2 | CRF + 多维度输入 + COCO预训练 | 排行榜 |
论文:
Pyramid Scene Parsing Network
于2016年12月4日提交到Arxiv
https://arxiv.org/abs/1612.01105
主要贡献:
-
提出了金字塔池化模块来聚合背景信息;
-
使用了附加损失(auxiliary loss)。
具体解释:
全局场景分类很重要,由于它提供了分割类别分布的线索。金字塔池化模块使用大内核池化层来捕获这些信息。
和上文提到的空洞卷积论文一样,PSPNet也用空洞卷积来改善Resnet结构,并添加了一个金字塔池化模块。该模块将ResNet的特征图谱连接到并行池化层的上采样输出,其中内核分别覆盖了图像的整个区域、半各区域和小块区域。
在ResNet网络的第四阶段(即输入到金字塔池化模块后),除了主分支的损失之外又新增了附加损失,这种思想在其他研究中也被称为中级监督(intermediate supervision)。

△PSPNet网络结构
| 分值 | 评论 | 来源 |
|---|---|---|
| 85.4 | COCO预训练,多维度输入,无CRF方法 | 排行榜 |
| 82.6 | 无COCO预训练方法,多维度输入,无CRF方法 | PSPNet论文 |
论文:
Large Kernel Matters — Improve Semantic Segmentation by Global Convolutional Network
于2017年3月8日提交到Arxiv
https://arxiv.org/abs/1703.02719
主要贡献:
提出了一种带有大维度卷积核的编码器-解码器结构。
具体解释:
这项研究通过全局卷积网络来提高语义分割的效果。
语义分割不仅需要图像分割,而且需要对分割目标进行分类。在分割结构中不能使用全连接层,这项研究发现可以使用大维度内核来替代。
采用大内核结构的另一个原因是,尽管ResNet等多种深层网络具有很大的感受野,有相关研究发现网络倾向于在一个小得多的区域来获取信息,并提出了有效感受野的概念。
大内核结构计算成本高,且具有很多结构参数。因此,k×k卷积可近似成1×k+k×1和k×1+1×k的两种分布组合。这个模块称为全局卷积网络(Global Convolutional Network, GCN)。
接下来谈结构,ResNet(不带空洞卷积)组成了整个结构的编码器部分,同时GCN网络和反卷积层组成了解码器部分。该结构还使用了一种称作边界细化(Boundary Refinement,BR)的简单残差模块。

△GCN网络结构
| 分值 | 评论 | 来源 |
|---|---|---|
| 82.2 | - | 详情见本论文 |
| 83.6 | 改进训练过程,未在本文中详细描述 | 排行榜 |
论文:
Rethinking Atrous Convolution for Semantic Image Segmentation
于2017年6月17日提交到Arxiv
https://arxiv.org/abs/1706.05587
主要贡献:
-
改进了空间维度上的金字塔空洞池化方法(ASPP);
-
该模块级联了多个空洞卷积结构。
具体解释:
与在DeepLab v2网络、空洞卷积中一样,这项研究也用空洞卷积/多空卷积来改善ResNet模型。
这篇论文还提出了三种改善ASPP的方法,涉及了像素级特征的连接、加入1×1的卷积层和三个不同比率下3×3的空洞卷积,还在每个并行卷积层之后加入了批量归一化操作。
级联模块实际上是一个残差网络模块,但其中的空洞卷积层是以不同比率构建的。这个模块与空洞卷积论文中提到的背景模块相似,但直接应用到中间特征图谱中,而不是置信图谱。置信图谱是指其通道数与类别数相同的CNN网络顶层特征图谱。
该论文独立评估了这两个所提出的模型,尝试结合将两者结合起来并没有提高实际性能。两者在验证集上的实际性能相近,带有ASPP结构的模型表现略好一些,且没有加入CRF结构。
这两种模型的性能优于DeepLabv2模型的最优值,文章中还提到性能的提高是由于加入了批量归一化层和使用了更优的方法来编码多尺度背景。
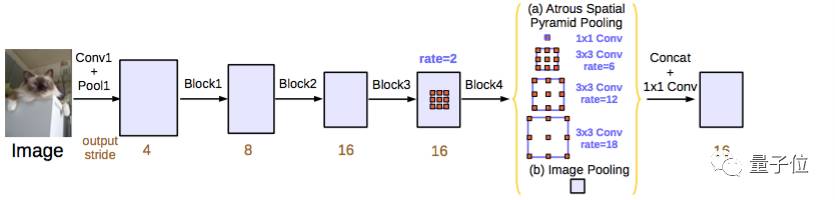
△DeepLabv3 ASPP结构
| 分值 | 评论 | 来源 |
|---|---|---|
| 85.7 | 使用了ASPP结构,且不带有级联模块 | 排行榜 |
原文地址:
http://blog.qure.ai/notes/semantic-segmentation-deep-learning-review
0004,算法
https://www.jianshu.com/p/124893b7ae8c
传统的基于CNN的分割方法缺点?
传统的基于CNN的分割方法:为了对一个像素分类,使用该像素周围的一个图像块作为CNN的输入,用于训练与预测,这种方法主要有几个缺点:
1)存储开销大,例如,对每个像素使用15 * 15的图像块,然后不断滑动窗口,将图像块输入到CNN中进行类别判断,因此,需要的存储空间随滑动窗口的次数和大小急剧上升;
2)效率低下,相邻像素块基本上是重复的,针对每个像素块逐个计算卷积,这种计算有很大程度上的重复;
3)像素块的大小限制了感受区域的大小,通常像素块的大小比整幅图像的大小小很多,只能提取一些局部特征,从而导致分类性能受到限制。
而全卷积网络(FCN)则是从抽象的特征中恢复出每个像素所属的类别。即从图像级别的分类进一步延伸到像素级别的分类。
1 FCN
1.1 FCN改变了什么?
对于一般的分类CNN网络,如VGG和Resnet,都会在网络的最后加入一些全连接层,经过softmax后就可以获得类别概率信息。但是这个概率信息是1维的,即只能标识整个图片的类别,不能标识每个像素点的类别,所以这种全连接方法不适用于图像分割。

而FCN提出可以把后面几个全连接都换成卷积,这样就可以获得一张2维的feature map,后接softmax获得每个像素点的分类信息,从而解决了分割问题,如图4。

1.2 FCN网络结构
FCN对图像进行像素级的分类,从而解决了语义级别的图像分割(semantic segmentation)问题。与经典的CNN在卷积层之后使用全连接层得到固定长度的特征向量进行分类(全联接层+softmax输出)不同,FCN可以接受任意尺寸的输入图像,采用反卷积层对最后一个卷积层的feature map进行上采样, 使它恢复到输入图像相同的尺寸,从而可以对每个像素都产生了一个预测, 同时保留了原始输入图像中的空间信息, 最后在上采样的特征图上进行逐像素分类。
下图是语义分割所采用的全卷积网络(FCN)的结构示意图:

1.3 全卷积网络举例
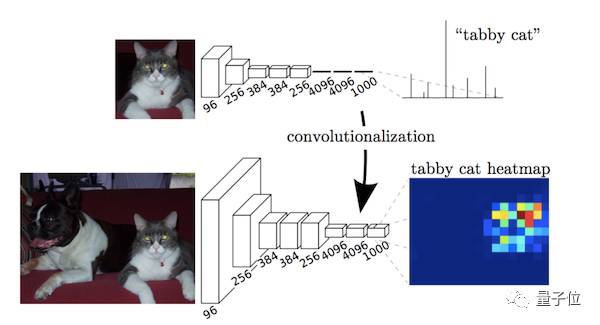
通常CNN网络在卷积层之后会接上若干个全连接层, 将卷积层产生的特征图(feature map)映射成一个固定长度的特征向量。以AlexNet为代表的经典CNN结构适合于图像级的分类和回归任务,因为它们最后都得到整个输入图像的一个概率向量,比如AlexNet的ImageNet模型输出一个1000维的向量表示输入图像属于每一类的概率(softmax归一化)。

如图所示:
(1)在CNN中, 猫的图片输入到AlexNet, 得到一个长为1000的输出向量, 表示输入图像属于每一类的概率, 其中在“tabby cat”这一类统计概率最高, 用来做分类任务。
(2)FCN与CNN的区别在于把于CNN最后的全连接层转换成卷积层,输出的是一张已经Label好的图片, 而这个图片就可以做语义分割。
(3)CNN的强大之处在于它的多层结构能自动学习特征,并且可以学习到多个层次的特征: 较浅的卷积层感知域较小,学习到一些局部区域的特征;较深的卷积层具有较大的感知域,能够学习到更加抽象一些的特征。高层的抽象特征对物体的大小、位置和方向等敏感性更低,从而有助于识别性能的提高, 所以我们常常可以将卷积层看作是特征提取器。
1.4 全连接层和卷积层如何相互转化?
两者相互转换的可能性:
全连接层和卷积层之间唯一的不同就是卷积层中的神经元只与输入数据中的一个局部区域连接,并且在卷积列中的神经元共享参数。然而在两类层中,神经元都是计算点积,所以它们的函数形式是一样的。因此,将此两者相互转化是可能的:
(1)对于任一个卷积层,都存在一个能实现和它一样的前向传播函数的全连接层。权重矩阵是一个巨大的矩阵,除了某些特定块,其余部分都是零。而在其中大部分块中,元素都是相等的。
(2)任何全连接层都可以被转化为卷积层。比如VGG16中第一个全连接层是25088 * 4096的数据尺寸,将它转化为512 * 7 * 7 * 4096的数据尺寸,即一个K=4096的全连接层,输入数据体的尺寸是7 * 7 * 512,这个全连接层可以被等效地看做一个F=7, P=0, S=1, K=4096 的卷积层。换句话说,就是将滤波器的尺寸设置为和输入数据体的尺寸一致7 * 7, 这样输出就变为1 * 1 * 4096, 本质上和全连接层的输出是一样的。
输出激活数据体深度是由卷积核的数目决定的(K=4096)。
在两种变换中,将全连接层转化为卷积层在实际运用中更加有用。假设一个卷积神经网络的输入是227x227x3的图像,一系列的卷积层和下采样层将图像数据变为尺寸为7x7x512的激活数据体, AlexNet的处理方式为使用了两个尺寸为4096的全连接层,最后一个有1000个神经元的全连接层用于计算分类评分。我们可以将这3个全连接层中的任意一个转化为卷积层:
(1)第一个连接区域是[7x7x512]的全连接层,令其滤波器尺寸为F=7,K=4096,这样输出数据体就为[1x1x4096]。
(2)第二个全连接层,令其滤波器尺寸为F=1,K=4096,这样输出数据体为[1x1x4096]。
(3)最后一个全连接层也做类似的,令其F=1,K=1000,最终输出为[1x1x1000]。
1.5 为什么传统CNN的输入图片是固定大小?
对于CNN,一幅输入图片在经过卷积和pooling层时,这些层是不关心图片大小的。比如对于一个卷积层,outputsize = (inputsize - kernelsize) / stride + 1,它并不关心inputsize多大,对于一个inputsize大小的输入feature map,滑窗卷积,输出outputsize大小的feature map即可。pooling层同理。但是在进入全连接层时,feature map(假设大小为n×n)要拉成一条向量,而向量中每个元素(共n×n个)作为一个结点都要与下一个层的所有结点(假设4096个)全连接,这里的权值个数是4096×n×n,而我们知道神经网络结构一旦确定,它的权值个数都是固定的,所以这个n不能变化,n是conv5的outputsize,所以层层向回看,每个outputsize都要固定,那每个inputsize都要固定,因此输入图片大小要固定。
1.6 把全连接层的权重W重塑成卷积层的滤波器有什么好处?
这样的转化可以在单个向前传播的过程中, 使得卷积网络在一张更大的输入图片上滑动,从而得到多个输出(可以理解为一个label map)。
比如: 我们想让224×224尺寸的浮窗,以步长为32在384×384的图片上滑动,把每个经停的位置都带入卷积网络,最后得到6×6个位置的类别得分, 那么通过将全连接层转化为卷积层之后的运算过程为:
如果224×224的输入图片经过卷积层和下采样层之后得到了[7x7x512]的数组,那么,384×384的大图片直接经过同样的卷积层和下采样层之后会得到[12x12x512]的数组, 然后再经过上面由3个全连接层转化得到的3个卷积层,最终得到[6x6x1000]的输出((12 – 7)/1 + 1 = 6), 这个结果正是浮窗在原图经停的6×6个位置的得分。
一个确定的CNN网络结构之所以要固定输入图片大小,是因为全连接层权值数固定,而该权值数和feature map大小有关, 但是FCN在CNN的基础上把1000个结点的全连接层改为含有1000个1×1卷积核的卷积层,经过这一层,还是得到二维的feature map,同样我们也不关心这个feature map大小, 所以对于输入图片的size并没有限制。
如下图所示,FCN将传统CNN中的全连接层转化成卷积层,对应CNN网络FCN把最后三层全连接层转换成为三层卷积层:




(1)全连接层转化为全卷积层 : 在传统的CNN结构中,前5层是卷积层,第6层和第7层分别是一个长度为4096的一维向量,第8层是长度为1000的一维向量,分别对应1000个不同类别的概率。FCN将这3层表示为卷积层,卷积核的大小 (通道数,宽,高) 分别为 (4096,1,1)、(4096,1,1)、(1000,1,1)。看上去数字上并没有什么差别,但是卷积跟全连接是不一样的概念和计算过程,使用的是之前CNN已经训练好的权值和偏置,但是不一样的在于权值和偏置是有自己的范围,属于自己的一个卷积核。
(2)CNN中输入的图像大小是统一固定成227x227大小的图像,第一层pooling后为55x55,第二层pooling后图像大小为27x27,第五层pooling后的图像大小为13x13, 而FCN输入的图像是H * W大小,第一层pooling后变为原图大小的1/2,第二层变为原图大小的1/4,第五层变为原图大小的1/8,第八层变为原图大小的1/16。
(3)经过多次卷积和pooling以后,得到的图像越来越小,分辨率越来越低。其中图像到H/32 * W/32的时候图片是最小的一层时,所产生图叫做heatmap热图,热图就是我们最重要的高维特征图,得到高维特征的heatmap之后就是最重要的一步也是最后的一步对原图像进行upsampling,把图像进行放大几次到原图像的大小。
相较于使用被转化前的原始卷积神经网络对所有36个位置进行迭代计算优化模型,然后再对36个位置做预测,使用转化后的卷积神经网络进行一次前向传播计算要高效得多,因为36次计算都在共享计算资源。这一技巧在实践中经常使用,通常将一张图像尺寸变得更大,然后使用变换后的卷积神经网络来对空间上很多不同位置进行评价得到分类评分,然后在求这些分值的平均值。
1.7 反卷积层理解
Upsampling的操作可以看成是反卷积(deconvolutional),卷积运算的参数和CNN的参数一样是在训练FCN模型的过程中通过bp算法学习得到。反卷积层也是卷积层,不关心input大小,滑窗卷积后输出output。deconv并不是真正的deconvolution(卷积的逆变换),最近比较公认的叫法应该是transposed convolution,deconv的前向传播就是conv的反向传播。
反卷积参数: 利用卷积过程filter的转置(实际上就是水平和竖直方向上翻转filter)作为计算卷积前的特征图。
反卷积的运算如下所示:

蓝色是反卷积层的input,绿色是反卷积层的outputFull padding, transposed Full padding, transposed。
上图中的反卷积,input是2×2, output是4×4。 Zero padding, non-unit strides, transposed。

1.8 跳级(skip)结构
对CNN的结果做处理,得到了dense prediction,而作者在试验中发现,得到的分割结果比较粗糙,所以考虑加入更多前层的细节信息,也就是把倒数第几层的输出和最后的输出做一个fusion,实际上也就是加和:

实验表明,这样的分割结果更细致更准确。在逐层fusion的过程中,做到第三行再往下,结果又会变差,所以作者做到这里就停了。
1.9 模型训练
(1)用AlexNet,VGG16或者GoogleNet训练好的模型做初始化,在这个基础上做fine-tuning,全部都fine-tuning,只需在末尾加上upsampling,参数的学习还是利用CNN本身的反向传播原理。
(2)采用whole image做训练,不进行patchwise sampling。实验证明直接用全图已经很effective and efficient。
(3)对class score的卷积层做全零初始化。随机初始化在性能和收敛上没有优势。
举例:
FCN例子: 输入可为任意尺寸图像彩色图像;输出与输入尺寸相同,深度为:20类目标+背景=21,模型基于AlexNet。
蓝色:卷积层。
绿色:Max Pooling层。
黄色: 求和运算, 使用逐数据相加,把三个不同深度的预测结果进行融合:较浅的结果更为精细,较深的结果更为鲁棒。
灰色: 裁剪, 在融合之前,使用裁剪层统一两者大小, 最后裁剪成和输入相同尺寸输出。
对于不同尺寸的输入图像,各层数据的尺寸(height,width)相应变化,深度(channel)不变。

(1)全卷积层部分进行特征提取, 提取卷积层(3个蓝色层)的输出来作为预测21个类别的特征。
(2)图中虚线内是反卷积层的运算, 反卷积层(3个橙色层)可以把输入数据尺寸放大。和卷积层一样,升采样的具体参数经过训练确定。
-
以经典的AlexNet分类网络为初始化。最后两级是全连接(红色),参数弃去不用。
![]()
-
从特征小图()预测分割小图(),之后直接升采样为大图。
![]()
反卷积(橙色)的步长为32,这个网络称为FCN-32s
-
升采样分为两次完成(橙色×2), 在第二次升采样前,把第4个pooling层(绿色)的预测结果(蓝色)融合进来。使用跳级结构提升精确性。
![]()
第二次反卷积步长为16,这个网络称为FCN-16s
-
升采样分为三次完成(橙色×3), 进一步融合了第3个pooling层的预测结果。
![]()
第三次反卷积步长为8,记为FCN-8s




其他参数:
minibatch:20张图片。
learning rate:0.001。
初始化:分类网络之外的卷积层参数初始化为0。
反卷积参数初始化为bilinear插值。
最后一层反卷积固定位bilinear插值不做学习。

1.10 FCN缺点
(1)得到的结果还是不够精细。进行8倍上采样虽然比32倍的效果好了很多,但是上采样的结果还是比较模糊和平滑,对图像中的细节不敏感。
(2)对各个像素进行分类,没有充分考虑像素与像素之间的关系。忽略了在通常的基于像素分类的分割方法中使用的空间规整(spatial regularization)步骤,缺乏空间一致性。
2. U-Net
卷积网络被大规模应用在分类任务中,输出的结果是整个图像的类标签。然而,在许多视觉任务,尤其是生物医学图像处理领域,目标输出应该包括目标类别的位置,并且每个像素都应该有类标签。另外,在生物医学图像往往缺少训练图片。所以,Ciresan等人训练了一个卷积神经网络,用滑动窗口提供像素的周围区域(patch)作为输入来预测每个像素的类标签。这个网络有两个优点:
第一,输出结果可以定位出目标类别的位置;
第二,由于输入的训练数据是patches,这样就相当于进行了数据增广,解决了生物医学图像数量少的问题。
但是,这个方法也有两个很明显缺点。
第一,它很慢,因为这个网络必须训练每个patch,并且因为patch间的重叠有很多的冗余(冗余会造成什么影响呢?卷积核里面的W,就是提取特征的权重,两个块如果重叠的部分太多,这个权重会被同一些特征训练两次,造成资源的浪费,减慢训练时间和效率,虽然说会有一些冗余,训练集大了,准确率不就高了吗?可是你这个是相同的图片啊,重叠的东西都是相同的,举个例子,我用一张相同的图片训练20次,按照这个意思也是增大了训练集啊,可是会出现什么结果呢,很显然,会导致过拟合,也就是对你这个图片识别很准,别的图片就不一定了)。
第二,定位准确性和获取上下文信息不可兼得。大的patches需要更多的max-pooling层这样减小了定位准确性(为什么?因为你是对以这个像素为中心的点进行分类,如果patch太大,最后经过全连接层的前一层大小肯定是不变的,如果你patch大就需要更多的pooling达到这个大小,而pooling层越多,丢失信息的信息也越多;小的patches只能看到很小的局部信息,包含的背景信息不够。
这篇论文建立了一个更好全卷积方法。我们定义和扩展了这个方法它使用更少的训练图片但产生更精确的分割。

(1) 使用全卷积神经网络。(全卷积神经网络就是卷积取代了全连接层,全连接层必须固定图像大小而卷积不用,所以这个策略使得,你可以输入任意尺寸的图片,而且输出也是图片,所以这是一个端到端的网络。)
(2) 左边的网络是收缩路径:使用卷积和maxpooling。
(3) 右边的网络是扩张路径:使用上采样产生的特征图与左侧收缩路径对应层产生的特征图进行concatenate操作。(pooling层会丢失图像信息和降低图像分辨率且是不可逆的操作,对图像分割任务有一些影响,对图像分类任务的影响不大,为什么要做上采样?
因为上采样可以补足一些图片的信息,但是信息补充的肯定不完全,所以还需要与左边的分辨率比较高的图片相连接起来(直接复制过来再裁剪到与上采样图片一样大小),这就相当于在高分辨率和更抽象特征当中做一个折衷,因为随着卷积次数增多,提取的特征也更加有效,更加抽象,上采样的图片是经历多次卷积后的图片,肯定是比较高效和抽象的图片,然后把它与左边不怎么抽象但更高分辨率的特征图片进行连接)。
(4) 最后再经过两次反卷积操作,生成特征图,再用两个1X1的卷积做分类得到最后的两张heatmap,例如第一张表示的是第一类的得分,第二张表示第二类的得分heatmap,然后作为softmax函数的输入,算出概率比较大的softmax类,选择它作为输入给交叉熵进行反向传播训练。
下面是U-Net模型的代码实现:(贡献者:黄钦建-华南理工大学)
def get_unet():
inputs = Input((img_rows, img_cols, 1))
conv1 = Conv2D(32, (3, 3), activation='relu', padding='same')(inputs)
conv1 = Conv2D(32, (3, 3), activation='relu', padding='same')(conv1)
pool1 = MaxPooling2D(pool_size=(2, 2))(conv1)
# pool1 = Dropout(0.25)(pool1)
# pool1 = BatchNormalization()(pool1)
conv2 = Conv2D(64, (3, 3), activation='relu', padding='same')(pool1)
conv2 = Conv2D(64, (3, 3), activation='relu', padding='same')(conv2)
pool2 = MaxPooling2D(pool_size=(2, 2))(conv2)
# pool2 = Dropout(0.5)(pool2)
# pool2 = BatchNormalization()(pool2)
conv3 = Conv2D(128, (3, 3), activation='relu', padding='same')(pool2)
conv3 = Conv2D(128, (3, 3), activation='relu', padding='same')(conv3)
pool3 = MaxPooling2D(pool_size=(2, 2))(conv3)
# pool3 = Dropout(0.5)(pool3)
# pool3 = BatchNormalization()(pool3)
conv4 = Conv2D(256, (3, 3), activation='relu', padding='same')(pool3)
conv4 = Conv2D(256, (3, 3), activation='relu', padding='same')(conv4)
pool4 = MaxPooling2D(pool_size=(2, 2))(conv4)
# pool4 = Dropout(0.5)(pool4)
# pool4 = BatchNormalization()(pool4)
conv5 = Conv2D(512, (3, 3), activation='relu', padding='same')(pool4)
conv5 = Conv2D(512, (3, 3), activation='relu', padding='same')(conv5)
up6 = concatenate([Conv2DTranspose(256, (2, 2), strides=(
2, 2), padding='same')(conv5), conv4], axis=3)
# up6 = Dropout(0.5)(up6)
# up6 = BatchNormalization()(up6)
conv6 = Conv2D(256, (3, 3), activation='relu', padding='same')(up6)
conv6 = Conv2D(256, (3, 3), activation='relu', padding='same')(conv6)
up7 = concatenate([Conv2DTranspose(128, (2, 2), strides=(
2, 2), padding='same')(conv6), conv3], axis=3)
# up7 = Dropout(0.5)(up7)
# up7 = BatchNormalization()(up7)
conv7 = Conv2D(128, (3, 3), activation='relu', padding='same')(up7)
conv7 = Conv2D(128, (3, 3), activation='relu', padding='same')(conv7)
up8 = concatenate([Conv2DTranspose(64, (2, 2), strides=(
2, 2), padding='same')(conv7), conv2], axis=3)
# up8 = Dropout(0.5)(up8)
# up8 = BatchNormalization()(up8)
conv8 = Conv2D(64, (3, 3), activation='relu', padding='same')(up8)
conv8 = Conv2D(64, (3, 3), activation='relu', padding='same')(conv8)
up9 = concatenate([Conv2DTranspose(32, (2, 2), strides=(
2, 2), padding='same')(conv8), conv1], axis=3)
# up9 = Dropout(0.5)(up9)
# up9 = BatchNormalization()(up9)
conv9 = Conv2D(32, (3, 3), activation='relu', padding='same')(up9)
conv9 = Conv2D(32, (3, 3), activation='relu', padding='same')(conv9)
# conv9 = Dropout(0.5)(conv9)
conv10 = Conv2D(1, (1, 1), activation='sigmoid')(conv9)
model = Model(inputs=[inputs], outputs=[conv10])
model.compile(optimizer=Adam(lr=1e-5),
loss=dice_coef_loss, metrics=[dice_coef])
return model
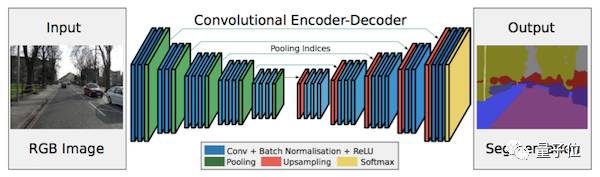
3. SegNet
可训练的图像分割引擎,包含一个encoder网络,一个对应的decoder网络,衔接像素级分类层,解码网络与VGG16的13层卷积层相同。解码网络是将低分辨率的编码特征图映射到全分辨率的特征图。解码网络使用最大池化层的池化索引进行非线性上采样,上采样过程就不需要学习。上采样得到的稀疏图与可训练的滤波器卷积得到致密的特征图。
使用池化层索引进行上采样的优势:
1)提升边缘刻画度;
2)减少训练的参数;
3)这种上采样模式可以包含到任何编码-解码网络中。
SegNet网络的结构如下图所示:

SegNet网络结构如图所示,Input为输入图片,Output为输出分割的图像,不同颜色代表不同的分类。语义分割的重要性就在于不仅告诉你图片中某个东西是什么,而且告知你他在图片的位置。我们可以看到是一个对称网络,由中间绿色pooling层与红色upsampling层作为分割,左边是卷积提取高维特征,并通过pooling使图片变小,SegNet作者称为Encoder,右边是反卷积(在这里反卷积与卷积没有区别)与upsampling,通过反卷积使得图像分类后特征得以重现,upsampling使图像变大,SegNet作者称为Decoder,最后通过Softmax,输出不同分类的最大值。这就是大致的SegNet过程,下面对这个过程里面使用到的方法进行介绍。
编码网络与滤波器族卷积得到特征图,进行BN,ReLU,最大池化。最大池化是为了获得空间小位移的平移不变。最大池化和下采样损失了边缘细节,因此,在编码过程中保存边缘信息很重要。考虑到内存原因,只保存最大池化索引,如最大特征值的位置。
SegNet解码技术如下图所示:

解码网络使用保存的最大池化索引上采样,得到稀疏的特征图,将特征图与可训练的解码滤波器族卷积得到致密的特征图。之后进行BN。高维的特征图输入soft-max层,对每个像素进行分类,得到每个像素属于K类的概率。 图3中右边是FCN的解码技术,FCN对编码的特征图进行降维,降维后输入到解码网络,解码网络中,上采样使用反卷积实现,上采样的特征图与降维的编码图进行element-wise add得到最终的解码特征图。FCN解码模型需要存储编码特征图,在嵌入式设备中内存紧张。
SegNet的Encoder过程中,卷积的作用是提取特征,SegNet使用的卷积为same卷积(详见卷积神经网络CNN(1)),即卷积后不改变图片大小;在Decoder过程中,同样使用same卷积,不过卷积的作用是为upsampling变大的图像丰富信息,使得在Pooling过程丢失的信息可以通过学习在Decoder得到。SegNet中的卷积与传统CNN的卷积并没有区别。
4. 空洞卷积(Dilated Convolutions)
在图像分割领域,图像输入到CNN(典型的网络比如FCN[3])中,FCN先像传统的CNN那样对图像做卷积再pooling,降低图像尺寸的同时增大感受野,但是由于图像分割预测是pixel-wise的输出,所以要将pooling后较小的图像尺寸upsampling到原始的图像尺寸进行预测(upsampling一般采用deconv反卷积操作,deconv可参见知乎答案如何理解深度学习中的deconvolution networks?),之前的pooling操作使得每个pixel预测都能看到较大感受野信息。因此图像分割FCN中有两个关键,一个是pooling减小图像尺寸增大感受野,另一个是upsampling扩大图像尺寸。在先减小再增大尺寸的过程中,肯定有一些信息损失掉了,那么能不能设计一种新的操作,不通过pooling也能有较大的感受野看到更多的信息呢?答案就是dilated conv。
以前的CNN主要问题总结:
(1)Up-sampling / pooling layer
(2)内部数据结构丢失;空间层级化信息丢失。
(3)小物体信息无法重建 (假设有四个pooling layer 则 任何小于 2^4 = 16 pixel 的物体信息将理论上无法重建。)
举例如下:

下面看一下dilated conv原始论文[4]中的示意图

(a) 图对应3x3的1-dilated conv,和普通的卷积操作一样,(b)图对应3x3的2-dilated conv,实际的卷积kernel size还是3x3,但是空洞为1,也就是对于一个7x7的图像patch,只有9个红色的点和3x3的kernel发生卷积操作,其余的点略过。也可以理解为kernel的size为7x7,但是只有图中的9个点的权重不为0,其余都为0。 可以看到虽然kernel size只有3x3,但是这个卷积的感受野已经增大到了7x7(如果考虑到这个2-dilated conv的前一层是一个1-dilated conv的话,那么每个红点就是1-dilated的卷积输出,所以感受野为3x3,所以1-dilated和2-dilated合起来就能达到7x7的conv),(c)图是4-dilated conv操作,同理跟在两个1-dilated和2-dilated conv的后面,能达到15x15的感受野。对比传统的conv操作,3层3x3的卷积加起来,stride为1的话,只能达到(kernel-1) * layer+1=7的感受野,也就是和层数layer成线性关系,而dilated conv的感受野是指数级的增长。
dilated的好处是不做pooling损失信息的情况下,加大了感受野,让每个卷积输出都包含较大范围的信息。在图像需要全局信息或者语音文本需要较长的sequence信息依赖的问题中,都能很好的应用dilated conv,比如图像分割、语音合成WaveNet、机器翻译ByteNet中。
5. RefineNet
网络结构:
RefineNet block的作用就是把不同resolution level的feature map进行融合。网络结构如下:

最左边一栏就是FCN的encoder部分(文中是用的ResNet),先把pretrained ResNet按feature map的分辨率分成四个ResNet blocks,然后向右把四个blocks分别作为4个path通过RefineNet block进行融合refine,最后得到一个refined feature map(接softmax再双线性插值输出)。
注意除了RefineNet-4,所有的RefineNet block都是二输入的,用于融合不同level做refine,而单输入的RefineNet-4可以看作是先对ResNet的一个task adaptation。
RefineNet Block
接下来仔细看一下RefineNet block,可以看到主要组成部分是Residual convolution unit, Multi-resolution fusion, Chained residual pooling, Output convolutions. 切记这个block作用是融合多个level的feature map输出单个level的feature map,但具体的实现应该是和输入个数、shape无关的。

Residual convolution unit就是普通的去除了BN的residual unit;
Multi-resolution fusion是先对多输入的feature map都用一个卷积层进行adaptation(都化到最小的feature map的shape),再上采样再做element-wise的相加。注意如果是像RefineNet-4那样的单输入block这一部分就直接pass了;
Chained residual pooling中的ReLU对接下来池化的有效性很重要,还可以使模型对学习率的变化没这么敏感。这个链式结构能从很大范围区域上获取背景context。另外,这个结构中大量使用了identity mapping这样的连接,无论长距离或者短距离的,这样的结构允许梯度从一个block直接向其他任一block传播。
Output convolutions就是输出前再加一个RCU。
6 PSPNet
场景解析对于无限制的开放词汇和不同场景来说是具有挑战性的.本文使用文中的pyramid pooling module实现基于不同区域的上下文集成,提出了PSPNet,实现利用上下文信息的能力进行场景解析。
作者认为,FCN存在的主要问题是没有采取合适的策略来用全局的信息,本文的做法就是借鉴SPPNet来设计了PSPNet解决这个问题。
很多State-of-the-art的场景解析框架都是基于FCN的.基于CNN的方法能够增强动态物体的理解,但是在无限制词汇和不同场景中仍然面临挑战.举个例子,如下图.

FCN认为右侧框中是汽车,但是实际上是船,如果参考上下文的先验知识,就会发现左边是一个船屋,进而推断是框中是船.FCN存在的主要问题就是不能利用好全局的场景线索。
对于尤其复杂的场景理解,之前都是采用空间金字塔池化来做的,和之前方法不同(为什么不同,需要参考一下经典的金字塔算法),本文提出了pyramid scene parsing network(PSPNet)。
本文的主要贡献如下:
(1) 提出了PSPNet在基于FCN的框架中集成困难的上下文特征
(2) 通过基于深度监督误差开发了针对ResNet的高效优化策略
(3) 构建了一个用于state-of-the-art的场景解析和语义分割的实践系统(具体是什么?)
通过观察FCN的结果,发现了如下问题:
(1) 关系不匹配(Mismatched Relationship)
(2) 易混淆的类别(Confusion Categories)
(3) 不显眼的类别(Inconspicuous Classes)
总结以上结果发现,以上问题部分或者全部与上下文关系和全局信息有关系,因此本文提出了PSPNet.框架如下:

并且加入额外的深度监督 Loss

7. DeepLab系列
7.1 DeepLabv1
DeepLab 是结合了深度卷积神经网络(DCNNs)和概率图模型(DenseCRFs)的方法。
在实验中发现 DCNNs 做语义分割时精准度不够的问题,根本原因是 DCNNs 的高级特征的平移不变性,即高层次特征映射,根源于重复的池化和下采样。
针对信号下采样或池化降低分辨率,DeepLab 是采用的 atrous(带孔)算法扩展感受野,获取更多的上下文信息。
分类器获取以对象中心的决策是需要空间变换的不变性,这天然地限制了 DCNN 的定位精度,DeepLab 采用完全连接的条件随机场(CRF)提高模型捕获细节的能力。
除空洞卷积和 CRFs 之外,论文使用的 tricks 还有 Multi-Scale features。其实就是 U-Net 和 FPN 的思想,在输入图像和前四个最大池化层的输出上附加了两层的 MLP,第一层是 128 个 3×3 卷积,第二层是 128 个 1×1 卷积。最终输出的特征与主干网的最后一层特征图融合,特征图增加 5×128=640 个通道。
实验表示多尺度有助于提升预测结果,但是效果不如 CRF 明显。
论文模型基于 VGG16,在 Titan GPU 上运行速度达到了 8FPS,全连接 CRF 平均推断需要 0.5s ,在 PASCAL VOC-2012 达到 71.6% IOU accuracy。
7.2 DeepLabv2
DeepLabv2 是相对于 DeepLabv1 基础上的优化。DeepLabv1 在三个方向努力解决,但是问题依然存在:特征分辨率的降低、物体存在多尺度,DCNN 的平移不变性。
因 DCNN 连续池化和下采样造成分辨率降低,DeepLabv2 在最后几个最大池化层中去除下采样,取而代之的是使用空洞卷积,以更高的采样密度计算特征映射。
物体存在多尺度的问题,DeepLabv1 中是用多个 MLP 结合多尺度特征解决,虽然可以提供系统的性能,但是增加特征计算量和存储空间。
论文受到 Spatial Pyramid Pooling (SPP) 的启发,提出了一个类似的结构,在给定的输入上以不同采样率的空洞卷积并行采样,相当于以多个比例捕捉图像的上下文,称为 ASPP (atrous spatial pyramid pooling) 模块。
DCNN 的分类不变形影响空间精度。DeepLabv2 是采样全连接的 CRF 在增强模型捕捉细节的能力。
论文模型基于 ResNet,在 NVidia Titan X GPU 上运行速度达到了 8FPS,全连接 CRF 平均推断需要 0.5s ,在耗时方面和 DeepLabv1 无差异,但在 PASCAL VOC-2012 达到 79.7 mIOU。
7.3 DeepLabv3
好的论文不止说明怎么做,还告诉为什么。DeepLab 延续到 DeepLabv3 系列,依然是在空洞卷积做文章,但是探讨不同结构的方向。
DeepLabv3 论文比较了多种捕获多尺度信息的方式:

1.Image Pyramid:将输入图片放缩成不同比例,分别应用在 DCNN 上,将预测结果融合得到最终输出。
2.-Decoder:利用 Encoder 阶段的多尺度特征,运用到 Decoder 阶段上恢复空间分辨率,代表工作有 FCN、SegNet、PSPNet 等工。
3.Deeper w. Atrous Convolution:在原始模型的顶端增加额外的模块,例如 DenseCRF,捕捉像素间长距离信息。
4.Spatial Pyramid Pooling:空间金字塔池化具有不同采样率和多种视野的卷积核,能够以多尺度捕捉对象。
DeepLabv1-v2 都是使用带孔卷积提取密集特征来进行语义分割。但是为了解决分割对象的多尺度问题,DeepLabv3 设计采用多比例的带孔卷积级联或并行来捕获多尺度背景。
此外,DeepLabv3 将修改之前提出的带孔空间金字塔池化模块,该模块用于探索多尺度卷积特征,将全局背景基于图像层次进行编码获得特征,取得 state-of-art 性能,在 PASCAL VOC-2012 达到 86.9 mIOU。
7.4 DeepLabv3+
语义分割关注的问题:
1、 实例对象多尺度问题。
2、 因为深度网络存在stride=2的层,会导致feature分辨率下降,从而导致预测精度降低,而造成的边界信息丢失问题。
deeplab V3新设计的aspp结构解决了问题1,deeplab v3+主要目的在于解决问题2。
问题2 可以使用空洞卷积替代更多的pooling层来获取分辨率更高的feature。但是feature分辨率更高会极大增加运算量。以deeplab v3使用的resnet101为例,stride=16将造成后面9层feature变大,后面9层的计算量变为原来的2*2=4倍大。stride=8则更为恐怖,后面78层的计算量都会变大很多。
解决方案:1、编解码器结构;2 Modified Aligned Xception

在deeplabv3基础上加入解码器。A是aspp结构,其中8x的上采样可以看做是一个解码器。B是编解码结构,它集合了高层和底层的特征。C就是本文采取的结构。
方法:
(1)Encoder-Decoder with Atrous Convolution

编码器采用deeplabv3。
解码器部分:先从低层级选一个feature,将低层级的feature用1 * 1的卷积进行通道压缩(原本为256通道,或者512通道),目的在于减少低层级的比重。作者认为编码器得到的feature具有更丰富的信息,所以编码器的feature应该有更高的比重。 这样做有利于训练。
再将编码器的输出上采样,使其分辨率与低层级feature一致。举个例子,如果采用resnet conv2 输出的feature,则这里要* 4上采样。将两种feature连接后,再进行一次3 * 3的卷积(细化作用),然后再次上采样就得到了像素级的预测。后面的实验结果表明这种结构在 stride=16 时既有很高的精度速度又很快。stride=8相对来说只获得了一点点精度的提升,但增加了很多的计算量。
(2)Modified Aligned Xception
Xception主要采用了deepwish seperable convolution来替换原来的卷积层。简单的说就是这种结构能在更少参数更少计算量的情况下学到同样的信息。这边则是考虑将原来的resnet-101骨架网换成xception。

红色部分为修改
更多层:重复8次改为16次(基于MSRA目标检测的工作)。
将原来简单的pool层改成了stride为2的deepwish seperable convolution。
额外的RELU层和归一化操作添加在每个 3 × 3 depthwise convolution之后(原来只在1 * 1卷积之后)
8 .Mask-R-CNN
8.1 Mask-RCNN 的网络结构示意图

其中黑色部分为原来的Faster-RCNN,红色部分为在Faster网络上的修改:
1)将ROI Pooling层替换成了ROIAlign;
2)添加并列的FCN层(Mask层);
先来概述一下Mask-RCNN的几个特点(来自于PaperMask R-CNN的Abstract):
1)在边框识别的基础上添加分支网络,用于语义Mask识别;
2)训练简单,相对于Faster仅增加一个小的Overhead,可以跑到5FPS;
3)可以方便的扩展到其他任务,比如人的姿态估计等;
4)不借助Trick,在每个任务上,效果优于目前所有的 single-model entries;包括 COCO 2016 的Winners。
8.2 RCNN行人检测框架
来看下后面两种RCNN方法与Mask结合的示意图:

图中灰色部分是原来的RCNN结合ResNet or FPN的网络,下面黑色部分为新添加的并联Mask层,这个图本身与上面的图也没有什么区别,旨在说明作者所提出的Mask RCNN方法的泛化适应能力:可以和多种RCNN框架结合,表现都不错。
8.3 Mask-RCNN 技术要点
1.技术要点1 - 强化的基础网络
通过ResNeXt-101+FPN用作特征提取网络,达到state-of-the-art的效果。
2.技术要点2 - ROIAlign
采用ROIAlign替代RoiPooling(改进池化操作)。引入了一个插值过程,先通过双线性插值到14 * 14,再pooling到7 * 7,很大程度上解决了仅通过Pooling直接采样带来的Misalignment对齐问题。
PS: 虽然 Misalignment 在分类问题上影响并不大,但在 Pixel 级别的 Mask 上会存在较大误差。
后面我们把结果对比贴出来(Table2 c & d),能够看到 ROIAlign 带来较大的改进,可以看到,Stride 越大改进越明显。
3.技术要点3 - Loss Function
每个ROIAlign对应K * m^2维度的输出。K对应类别个数,即输出K个mask,m对应池化分辨率(7 * 7)。Loss函数定义:
,平均二值交叉熵 (average binary cross-entropy)Loss,通过逐像素的 Sigmoid 计算得到。
Why K个mask?通过对每个 Class 对应一个Mask可以有效避免类间竞争(其他Class不贡献Loss)。

通过结果对比来看(Table2 b),也就是作者所说的 Decouple 解耦,要比多分类的Softmax效果好很多。
另外,作者给出了很多实验分割效果,就不都列了,只贴一张和FCIS的对比图(FCIS出现了Overlap的问题)

9. CNN在基于弱监督学习的图像分割中的应用
https://zhuanlan.zhihu.com/p/23811946
最近基于深度学习的图像分割技术一般依赖于卷积神经网络CNN的训练,训练过程中需要非常大量的标记图像,即一般要求训练图像中都要有精确的分割结果。
对于图像分割而言,要得到大量的完整标记过的图像非常困难,比如在ImageNet数据集上,有1400万张图有类别标记,有50万张图给出了bounding box,但是只有4460张图像有像素级别的分割结果。对训练图像中的每个像素做标记非常耗时,特别是对医学图像而言,完成对一个三维的CT或者MRI图像中各组织的标记过程需要数小时。
如果学习算法能通过对一些初略标记过的数据集的学习就能完成好的分割结果,那么对训练数据的标记过程就很简单,这可以大大降低花在训练数据标记上的时间。这些初略标记可以是:
1, 只给出一张图像里面包含哪些物体,
2, 给出某个物体的边界框,
3, 对图像中的物体区域做部分像素的标记,例如画一些线条、涂鸦等(scribbles)。
9.1 Scribble标记
论文地址:ScribbleSup: Scribble-Supervised Convolutional Networks for Semantic Segmentation (CVPR 2016)
香港中文大学的Di Lin提出了一个基于Scribble标记的弱监督学习方法。Scribble是一个很方便使用的标记方法,因此被用得比较广泛。如下图,只需要画五条线就能完成对一副图像的标记工作。

ScribbleSup分为两步,第一步将像素的类别信息从scribbles传播到其他未标记的像素,自动完成所有的训练图像的标记工作; 第二步使用这些标记图像训练CNN。在第一步中,该方法先生成super-pxels, 然后基于graph cut的方法对所有的super-pixel进行标记。

Graph Cut的能量函数为:
在这个graph中,每个super-pixel是graph中的一个节点,相接壤的super-pixel之间有一条连接的边。这个能量函数中的一元项包括两种情况,一个是来自于scribble的,一个是来自CNN对该super-pixel预测的概率。整个最优化过程实际上是求graph cut能量函数和CNN参数联合最优值的过程:
上式的最优化是通过交替求和
的最优值来实现的。文章中发现通过三次迭代就能得到比较好的结果。

9.2 图像级别标记
论文地址:Constrained Convolutional Neural Networks for Weakly Supervised Segmentation (ICCV 2015)
UC Berkeley的Deepak Pathak使用了一个具有图像级别标记的训练数据来做弱监督学习。训练数据中只给出图像中包含某种物体,但是没有其位置信息和所包含的像素信息。该文章的方法将image tags转化为对CNN输出的label分布的限制条件,因此称为 Constrained convolutional neural network (CCNN).

该方法把训练过程看作是有线性限制条件的最优化过程:
其中的线性限制条件来自于训练数据上的标记,例如一幅图像中前景类别像素个数期望值的上界或者下界(物体大小)、某个类别的像素个数在某图像中为0,或者至少为1等。该目标函数可以转化为为一个loss function,然后通过SGD进行训练。

实验中发现单纯使用Image tags作为限制条件得到的分割结果还比较差,在PASCAL VOC 2012 test数据集上得到的mIoU为35.6%,加上物体大小的限制条件后能达到45.1%,如果再使用bounding box做限制,可以达到54%。FCN-8s可以达到62.2%,可见弱监督学习要取得好的结果还是比较难。
9.3 DeepLab+bounding box+image-level labels
论文地址:Weakly-and Semi-Supervised Learning of a DCNN for Semantic Image Segmentation
Google的George Papandreou 和UCLA的Liang-Chieh Chen等在DeepLab的基础上进一步研究了使用bounding box和image-level labels作为标记的训练数据。使用了期望值最大化算法(EM)来估计未标记的像素的类别和CNN的参数。

对于image-level标记的数据,我们可以观测到图像的像素值和图像级别的标记 ,但是不知道每个像素的标号,因此把
这篇论文是通过EM算法来学习模型的参数

对于给出bounding box标记的训练图像,该方法先使用CRF对该训练图像做自动分割,然后在分割的基础上做全监督学习。通过实验发现,单纯使用图像级别的标记得到的分割效果较差,但是使用bounding box的训练数据可以得到较好的结果,在VOC2012 test数据集上得到mIoU 62.2%。另外如果使用少量的全标记图像和大量的弱标记图像进行结合,可以得到与全监督学习(70.3%)接近的分割结果(69.0%)。
9.4 统一的框架
论文地址:Learning to Segment Under Various Forms of Weak Supervision (CVPR 2015)
Wisconsin-Madison大学的Jia Xu提出了一个统一的框架来处理各种不同类型的弱标记:图像级别的标记、bounding box和部分像素标记如scribbles。该方法把所有的训练图像分成共计 个super-pixel,对每个super-pixel提取一个 维特征向量。因为不知道每个super-pixel所属的类别,相当于无监督学习,因此该方法对所有的super-pixel做聚类,使用的是最大间隔聚类方法(max-margin clustering, MMC),该过程的最优化目标函数是:
在这个目标函数的基础上,根据不同的弱标记方式,可以给出不同的限制条件,因此该方法就是在相应的限制条件下求最大间隔聚类。

该方法在Siftflow数据集上得到了比较好的结果,比state-of-the-art的结果提高了10%以上。
小结:在弱标记的数据集上训练图像分割算法可以减少对大量全标记数据的依赖,在大多数应用中会更加贴合实际情况。弱标记可以是图像级别的标记、边框和部分像素的标记等。训练的方法一般看做是限制条件下的最优化方法。另外EM算法可以用于CNN参数和像素类别的联合求优。
10. DenseNet(贡献者:黄钦建-华南理工大学)
这篇论文是CVPR2017年的最佳论文。
卷积神经网络结构的设计主要朝着两个方向发展,一个是更宽的网络(代表:GoogleNet、VGG),一个是更深的网络(代表:ResNet)。但是随着层数的加深会出现一个问题——梯度消失,这将会导致网络停止训练。到目前为止解决这个问题的思路基本都是在前后层之间加一个identity connections(short path)。

由上图中可知Resnet是做值的相加(也就是add操作),通道数是不变的。而DenseNet是做通道的合并(也就是Concatenation操作),就像Inception那样。从这两个公式就可以看出这两个网络的本质不同。此外DensetNet的前面一层输出也是后面所有层的输入,这也不同于ResNet残差网络。

DenseNet的Block结构如上图所示。
1*1卷积核的目的:减少输入的特征图数量,这样既能降维减少计算量,又能融合各个通道的特征。我们将使用BottleNeck Layers的DenseNet表示为DenseNet-B。(在论文的实验里,将1×1×n小卷积里的n设置为4k,k为每个H产生的特征图数量)

上图是DenseNet网络的整体网络结构示意图。其中1*1卷积核的目的是进一步压缩参数,并且在Transition Layer层有个参数Reduction(范围是0到1),表示将这些输出缩小到原来的多少倍,默认是0.5,这样传给下一个Dense Block的时候channel数量就会减少一半。当Reduction的值小于1的时候,我们就把带有这种层的网络称为DenseNet-C。
DenseNet网络的优点包括:
- 减轻了梯度消失
- 加强了feature的传递
- 更有效地利用了feature
- 一定程度上较少了参数数量
- 一定程度上减轻了过拟合
作者:飞天小小猫
链接:https://www.jianshu.com/p/124893b7ae8c
来源:简书
简书著作权归作者所有,任何形式的转载都请联系作者获得授权并注明出处。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号