马尔可夫决策过程中的动规
RL学习路线
记录强化学习入门的相关算法及实现。
DP Policy Evaluation
通过以下步骤进行同步backup,从而评估一个给定的 policy :
- 在第 $k+1$ 轮,
- 对于所有状态 $s\in S$,
- 更新
$v_{k+1}(s)=\sum_{a\in\mathcal{A}}\pi(a|s)(\mathcal{R}_sa+\gamma\sum_{s'\in\mathcal{S}}\mathcal{P}_{ss'}a v_k(s'))$ - 其中, $s'$ is a successor state of $s$

## 代码实现
def policy_eval(policy, env, discount_factor=1.0, theta=0.00001):
# value function初始化为全0/随机数
V = np.zeros(env.nS)
while True:
delta = 0
# 对每个状态进行backup
for s in range(env.nS):
v = 0
# 查找有可能的下一状态
for a, action_prob in enumerate(policy[s]):
# 对于每个动作,查找可能的下一状态
for prob, next_state, reward, done in env.P[s][a]:
# 计算预测值v
v += action_prob * prob * (reward + discount_factor * V[next_state])
# 获得所有状态下,最大的value function更新程度
delta = max(delta, np.abs(v - V[s]))
V[s] = v
# 更新程度小于阈值时停止评估
if delta < theta:
break
return np.array(V)
DP Policy Iteration
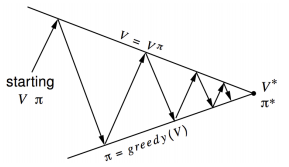
策略迭代的目标是获得最优策略,其步骤如下:
- 给定一个策略 $\pi$,
- 评估 $\pi$: $v_\pi(s)=\mathbb{E}[R_{t+1}+\gamma R_{t+2}+...|S_t=s]$
- 贪心地改善 $\pi$: $\pi '=greedy(v_\pi)$

其中,改善策略 $\pi$ 的步骤如下:
- 给定一个策略 $\pi$,且 $a=\pi(s)$
- 首先改善策略: $\pi '(s)=\arg\max_{a\in\mathcal{A}}q_\pi(s,a)$
- 再改善值 from any state $s$ over one step:
$$
q_\pi(s,\pi '(s))=\max_{a\in\mathcal{A}}q_\pi(s,a)\geq q_\pi(s,\pi(s))=v_\pi(s)
$$ - 因此改善了value function,有 $v_{\pi'}(s)\geq v_\pi(s)$(证明过程如下)
$$
\begin{align}
v_\pi(s)&\leq q_\pi(s,\pi'(s))=\mathbb{E}{\pi'}[R+\gamma v_\pi(S_{t+1})|S_t=s]\
&\leq\mathbb{E}{\pi'}[R+\gamma q_\pi(S_{t+1},\pi'(S_{t+1}))|S_t=s]\
&\leq\mathbb{E}{\pi'}[R+\gamma R_{t+2}+\gamma^2 q_\pi(S_{t+2},\pi'(S_{t+2}))|S_t=s]\
&\leq\mathbb{E}{\pi'}[R+\gamma R_{t+2}+...|S_t=s]=v_{\pi'}(s)
\end{align}
$$
[理论上]当满足条件$q_\pi(s,\pi '(s))=\max_{a\in\mathcal{A}}q_\pi(s,a)= q_\pi(s,\pi(s))=v_\pi(s)$(此时对任意状态s,都有$v_\pi(s)=v_(s)$)时,停止improvement。
[实际中]定义一个阈值$\epsilon$,当value function的更新程度 $\leq\epsilon$时,停止improvement*;或者,直接设定在k轮之后停止。
## 代码实现(policy_eval是前面的策略评估函数)
def policy_improvement(env, policy_eval_fn=policy_eval, discount_factor=1.0):
# 初始化策略
policy = np.ones([env.nS, env.nA]) / env.nA
while True:
# 评估当前策略
V = policy_eval_fn(env, policy, discount_factor)
# 若对策略进行了变动,则policy_stable为False
policy_stable = True
# 对每个状态
for s in range(env.nS):
# 选择在当前策略下可采取的最佳动作
chosen_a = np.argmax(policy[s])
# 向前一步寻找最佳动作
action_values = np.zeros(env.nA)
for a in range(env.nA):
for prob, next_state, reward, done in env.P[s][a]:
action_values[a] += prob * (reward + discount_factor * V[next_state])
best_a = np.argmax(action_values)
# 贪心更新策略
if chosen_a != best_a:
policy_stable = False
policy[s] = np.eye(env.nA)[best_a]
# 找到了最优策略
if policy_stable:
return policy, V
DP Value Iteration
值迭代的目标也是获得最优策略,其步骤如下:
- 在第 $k+1$ 轮,
- 对于所有状态 $s\in S$,
- 更新
$v_{k+1}(s)=\max_{a\in\mathcal{A}}(\mathcal{R}_sa+\gamma\sum_{s'\in\mathcal{S}}\mathcal{P}_{ss'}a v_k(s'))$ - 其中, $s'$ is a successor state of $s$

Value Iteration (VI) 逆向地(从状态s'到s)循环处理整个状态空间,直到找到最优路径(即 a set of optimal actions)
Value更新在VI 中和在PE (Policy Evaluation) 中的区别在于:
- 根据上一段描述的VI过程,在VI中更新value不需要知道当前策略是什么,仅仅直接作用于value空间,所以贪心地用$\max_{a\in\mathcal{A}}$;
- 而在PE中,因为目的是评估策略,value的更新是基于给定策略$\pi$的,所以用$\sum_{a\in\mathcal{A}}\pi(a|s)$。
## 代码实现
def value_iteration(env, theta=0.0001, discount_factor=1.0):
def one_step_lookahead(state, V):
A = np.zeros(env.nA)
for a in range(env.nA):
for prob, next_state, reward, done in env.P[state][a]:
A[a] += prob * (reward + discount_factor * V[next_state])
return A
V = np.zeros(env.nS)
while True:
# 停止更新的条件
delta = 0
# 对每个状态
for s in range(env.nS):
# 向前一步寻找最优动作的值(!注意这里是值,要和策略迭代区分开来)
A = one_step_lookahead(s, V)
best_action_value = np.max(A)
# 获得所有状态下,最大的value function更新程度
delta = max(delta, np.abs(best_action_value - V[s]))
# 更新value function
V[s] = best_action_value
# 更新程度小于阈值时停止更新
if delta < theta:
break
# 根据最优的value function得到policy
policy = np.zeros([env.nS, env.nA])
for s in range(env.nS):
# 向前一步寻找最优动作
A = one_step_lookahead(s, V)
best_action = np.argmax(A)
# 总是选择最优动作
policy[s, best_action] = 1.0
return policy, V

 浙公网安备 33010602011771号
浙公网安备 33010602011771号