
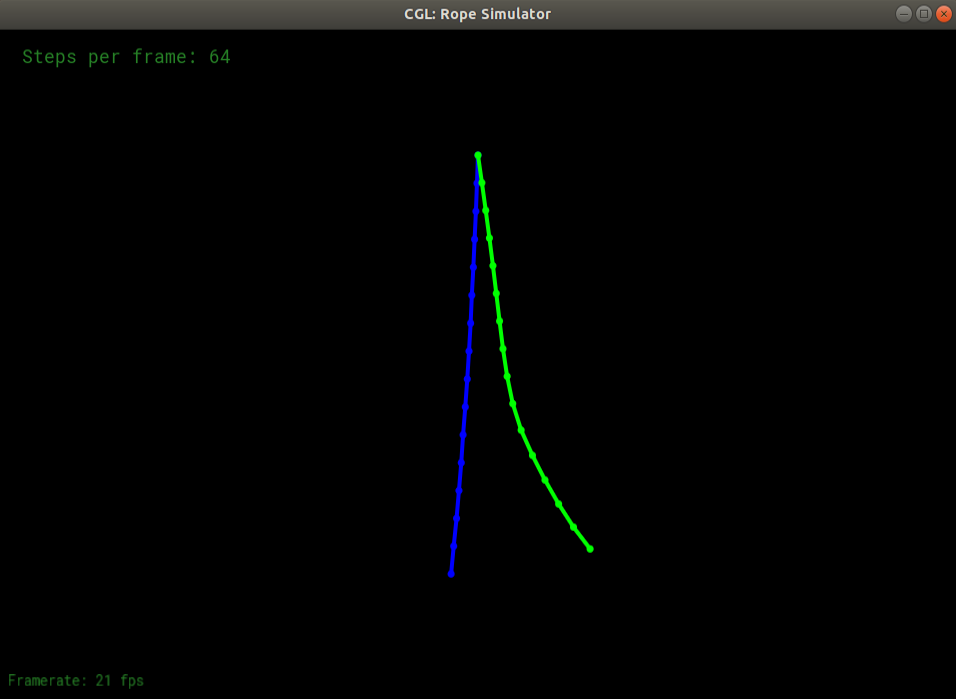
Games101 作业8 质点弹簧系统
1 前言
质点弹簧系统的模拟仿真,其实非常简单,核心就是牛顿第二定律 \(F = ma\), 以及一些数值积分,所要做的无非就是对每一个质点计算附加的力,力是矢量,速度是矢量,加速度也是矢量。
计算出力后,算出加速度,利用一个很小的时间,更新一下位置就好根据位置进行渲染。
下一个循环将力清零,开始重新计算合力。
显示欧拉和半隐式欧拉其实就是计算速度和位置的顺序变了一下,显示欧拉效果奇差无比,半隐式欧拉效果却非常好。至于Verlet Intergration是根据半隐式欧拉推导来的,比较难理解的是它需要做一些约束。
2 基础数据结构
核心的数据就是,位置,质量,速度,力。
struct Mass {
Mass(Vector2D position, float mass, bool pinned)
: start_position(position), position(position), last_position(position),
mass(mass), pinned(pinned) {}
float mass;
bool pinned;
Vector2D start_position;
Vector2D position;
// explicit Verlet integration
Vector2D last_position;
// explicit Euler integration
Vector2D velocity;
Vector2D forces;
};
3 欧拉
核心的差距就是先更新速度还是先更新位置。
// explicit Euler
m->position = m->position + m->velocity * delta_t;
m->velocity = m->velocity + acc * delta_t;
// semi-implicit Euler
m->velocity = m->velocity + acc * delta_t;
m->position = m->position + m->velocity * delta_t;
4 Verlet Integration
这个就是从semi-implicit Euler里推导出来的。
Vector2D temp_position = m->position;
// t + 1 t
m->position = m->position + (m->position - m->last_position) + acc * delta_t * delta_t;
// t-1 t
m->last_position = temp_position;
4.1 Constraints
Constraints的基础模型就是棍子小球模型,需要注意的是先处理小球再根据小球位置处理棍子长度。
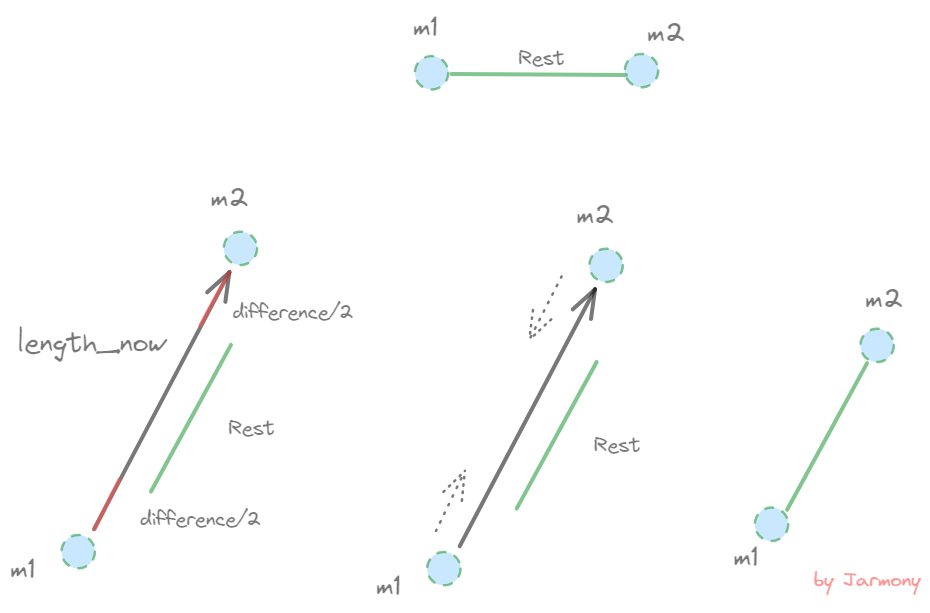
Vector2D vec_now = s->m2->position - s->m1->position;
// if length_now bigger than rest we need to plus at m1 minus at m2
float length = (s->m2->position - s->m1->position).norm();
float diff = length - s->rest_length;
// Althougth this will not matian the length, but it's a very quick approach!
// eg : (if only one of them two are pinned, the other will just + or - half-diff)
// if(!s->m1->pinned) s->m1->position += vec_now.unit() * diff * 0.5;
// if(!s->m2->pinned) s->m2->position -= vec_now.unit() * diff * 0.5;
if(!s->m1->pinned && !s->m2->pinned){
s->m1->position += vec_now.unit() * diff * 0.5;
s->m2->position -= vec_now.unit() * diff * 0.5;
}else if(s->m1->pinned && !s->m2->pinned){
// for just one pinned, the other will be shrink or extended the full diff
s->m2->position -= vec_now.unit() * diff;
}else if(!s->m1->pinned && s->m2->pinned){
s->m1->position += vec_now.unit() * diff;
}
Verlet Integration pikuma from youtube. https://www.youtube.com/watch?v=-GWTDhOQU6M
物理动画仿真渲染:http://datagenetics.com/blog/july22018/index.html
- Tips: 忽然发现 Verlet Integration 的实现出了问题,核心的算法没有问题,但是关于多个弹簧链接起来更新算法有些问题,和一个弹簧的模型不太一样。
会发现只有一个固定点,后面弹簧的长度更新会影响到前一个已经更新弹簧的位置。所以为了修正这种bug,我们可以把固定点进行传递。
伪代码:
首端固定
弹簧1:更新位置。
弹簧1:尾端(下一个弹簧2的首端)固定。//阻止下一个弹簧更新的影响
弹簧2:更新位置
弹簧2:尾端(下一个弹簧3的首端)固定。首端固定解除(恢复原样)。
...
大模型时代,文字创作已死。2025年全面停更了,世界不需要知识分享。
如果我的工作对您有帮助,您想回馈一些东西,你可以考虑通过分享这篇文章来支持我。我非常感谢您的支持,真的。谢谢!
作者:Dba_sys (Jarmony)
转载以及引用请注明原文链接:https://www.cnblogs.com/asmurmur/p/17564145.html
本博客所有文章除特别声明外,均采用CC 署名-非商业使用-相同方式共享 许可协议。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号