VINS-Mono配置记录
Ceres
要安装与现有的 Eigen 3.3.7 和 CMake 3.16.3 兼容的 Ceres Solver,可以按照以下步骤操作:
1. 下载与 Eigen 3.3.7 兼容的 Ceres Solver
- 根据 Eigen 版本和 Ceres Solver 的兼容性要求,推荐使用 Ceres Solver 1.14,因为它支持 Eigen 3.3.x。
- 你已经下载了 Ceres Solver 1.14,因此无需重新下载。
2. 检查依赖
确保以下依赖已经安装:
sudo apt-get update
sudo apt-get install -y libgoogle-glog-dev libgflags-dev libatlas-base-dev libsuitesparse-dev
3. 配置 Ceres Solver 的编译选项
-
清理之前的构建:
cd ~/autodl-tmp/ORB_SLAM3/Thirdparty/ceres-solver-1.14.0 rm -rf build mkdir build cd build -
配置编译:
cmake .. -DEIGEN_INCLUDE_DIR=/usr/include/eigen3 -DBUILD_TESTING=OFF -DBUILD_EXAMPLES=OFF解释:
-DEIGEN_INCLUDE_DIR=/usr/include/eigen3: 指定 Eigen 的安装路径。-DBUILD_TESTING=OFF: 不构建测试。-DBUILD_EXAMPLES=OFF: 不构建示例。
4. 编译 Ceres Solver
运行以下命令进行编译:
make -j$(nproc)
5. 安装 Ceres Solver
编译完成后安装:
sudo make install
6. 验证 Ceres Solver 的安装
通过以下方式确认安装:
ceres-solver-config.cmake
你应该会在 /usr/local/lib/cmake/Ceres 中看到 CeresConfig.cmake。
注意事项
- 如果
cmake在其他地方找不到 Eigen,确保在编译 ORB_SLAM3 时使用-DEIGEN_INCLUDE_DIR=/usr/include/eigen3。 - 如果还遇到问题,请检查其他依赖项(如 glog 和 gflags)是否正确安装。
完成以上步骤后,你的系统应该能成功安装与 Eigen 3.3.7 和 CMake 3.16.3 兼容的 Ceres Solver!
ROS
https://blog.csdn.net/weixin_39329788/article/details/119597419
下载这里的opencv和opencv_contrib
https://blog.csdn.net/weixin_39329788/article/details/119597419
然后解决make的报错,忽略xfeatures2d模块
cmake -D CMAKE_BUILD_TYPE=Release
-D CMAKE_INSTALL_PREFIX=/usr/local
-D OPENCV_EXTRA_MODULES_PATH=~/Downloads/opencv_contrib-3.3.1/modules/
-DBUILD_opencv_xfeatures2d=OFF
..
make -j$(nproc)
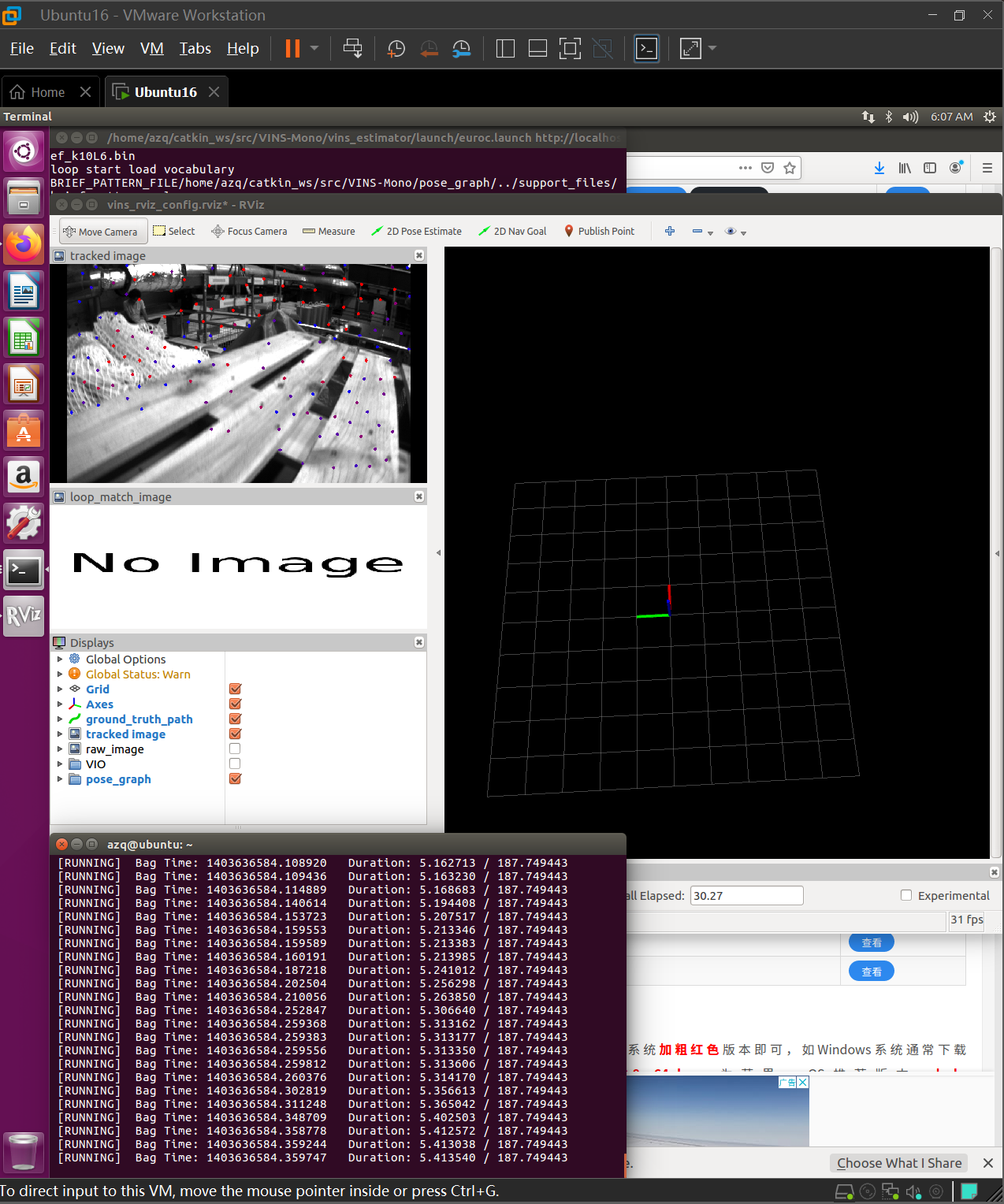
VINS-Mono
参考下面的,终于跑起来了!
https://blog.csdn.net/weixin_39329788/article/details/119597419
https://blog.csdn.net/weixin_44417938/article/details/107294330
https://blog.csdn.net/weixin_44417938/article/details/107294330


【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 微软正式发布.NET 10 Preview 1:开启下一代开发框架新篇章
· 没有源码,如何修改代码逻辑?
· NetPad:一个.NET开源、跨平台的C#编辑器
· PowerShell开发游戏 · 打蜜蜂
· 凌晨三点救火实录:Java内存泄漏的七个神坑,你至少踩过三个!
2022-11-21 python神经网络编程3之一些有趣的尝试