VMware Workstation+ubuntu18.04/20.04+无人机仿真工具链安装踩坑记录+飞起来了!!!
仅作记录和备份,不保证正确性和可移植性
Ubuntu 18.04.6
Ubuntu 18.04.6 LTS (Bionic Beaver)

VMware Workstation Pro 17
安装虚拟机(VMware)保姆级教程(附安装包)
这里下载17
密钥:VMware Workstation Pro 17 安装教程 (超详细-附16版本)
不要在官方虚拟机->安装VMware Tool
安装vmware tool open
sudo apt-get open-vm-tools-desktop
有图形化界面的ubuntu装open-vm-tools-desktop,没有图形化界面的ubuntu装open-vm-tools
换一个源(gui新方法),打开ubuntu的一个应用software & Updates
VMware Tools和open-vm-tools的安装与使用:解决虚拟机不全屏和无法传输文件的问题
apt命令介绍
sudo apt-get update 更新源
sudo apt-get install package 安装包
sudo apt-get remove package 删除包
sudo apt-cache search package 搜索软件包
sudo apt-cache show package 获取包的相关信息,如说明、大小、版本等
sudo apt-get install package --reinstall 重新安装包
sudo apt-get -f install 修复安装
sudo apt-get remove package --purge 删除包,包括配置文件等
sudo apt-get build-dep package 安装相关的编译环境
sudo apt-get upgrade 更新已安装的包
sudo apt-get dist-upgrade 升级系统
sudo apt-cache depends package 了解使用该包依赖那些包
sudo apt-cache rdepends package 查看该包被哪些包依赖
sudo apt-get source package 下载该包的源代码
sudo apt-get clean && sudo apt-get autoclean 清理无用的包
sudo apt-get check 检查是否有损坏的依赖
Ubuntu网络配置(无法上网+连外网+虚拟机和主机网络互通)
善用ping www.baidu.com,最后ctrl+c停止查看结果

ubuntu不能上网
Ubuntu上外网
VMware虚拟机网络配置-NAT篇
gazero+PX4+QGroundControl安装
非常感谢这个博客!!!让我多少环境配置基本成功了,来看看我的无人机
解决gazero安装问题
2024/04/01
QGroundControl Quick Start | QGC Guide (master)
Ubuntu LTS/Debian Linux 的开发环境 | PX4 自动驾驶用户指南 (main)
PX4 Autopilot User Guide
2024-03-24 13:04
2024-04-15
https://blog.csdn.net/ssr_acty/article/details/127603866
2024-04-16

好痛苦,终于配好了gazero
安装ubuntu20.04版本
2024-04-19
最后最后尝试这个方法,又删掉虚拟机重新安装一台了
Ubuntu20.04搭建PX4仿真环境及XTDrone开发平台(最详细最明白)
2024-04-20
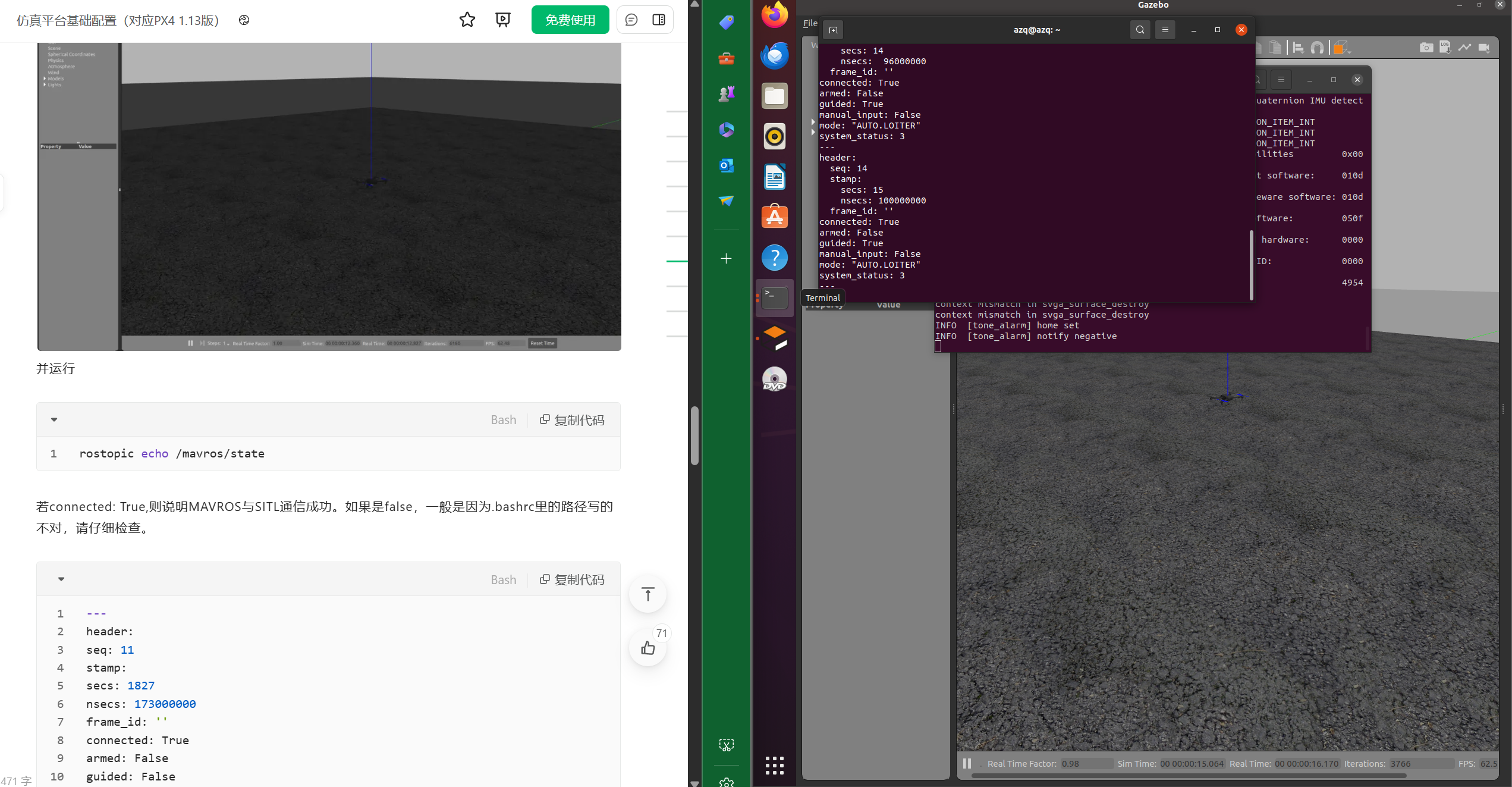
仿真平台基础配置(对应PX4 1.13版)

配好了ROS系统,谢谢古月居老师,谢谢鱼香ROS
把rosdep换成rosdepc 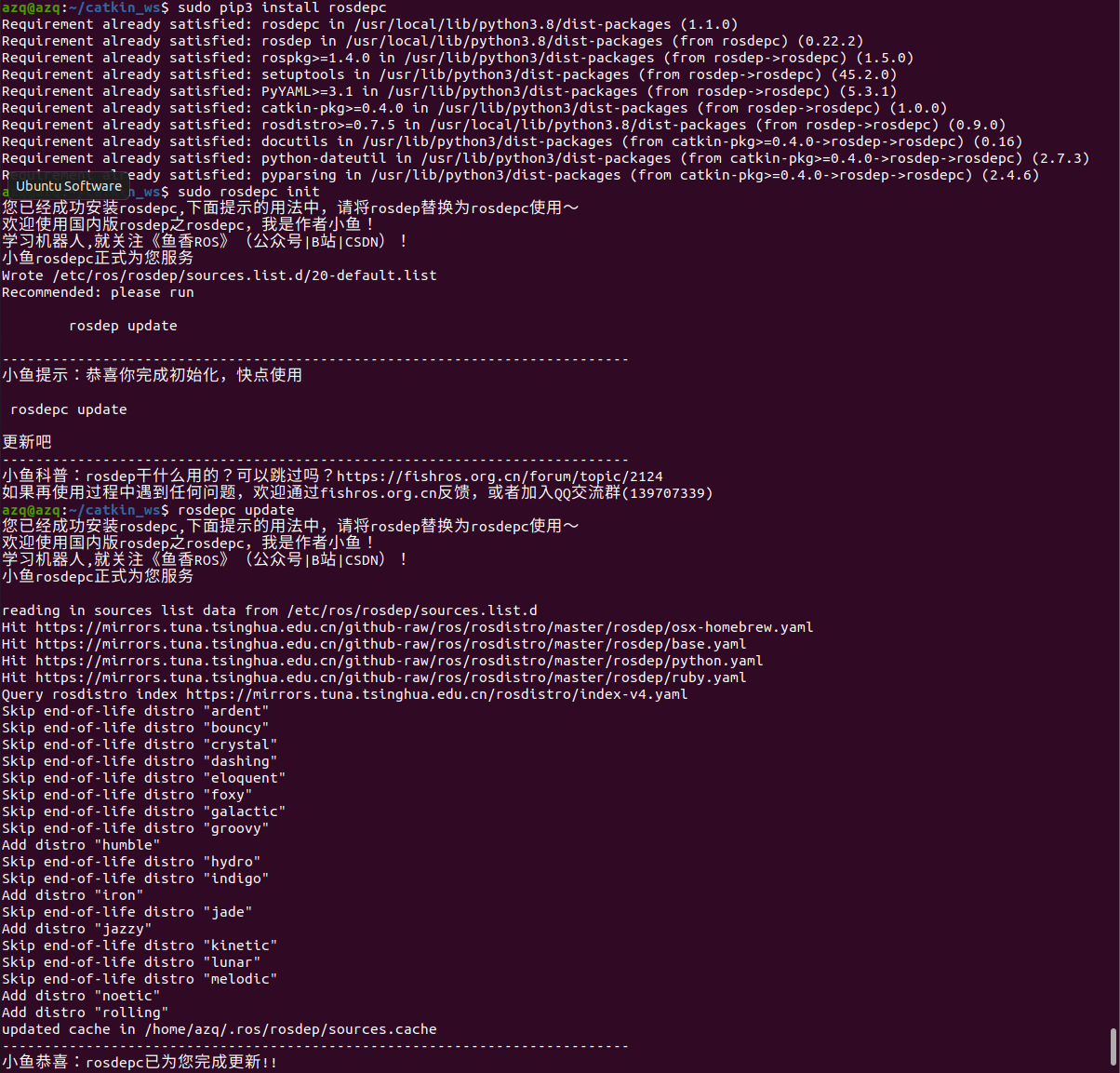
详细介绍如何在ubuntu20.04中安装ROS系统,以及安装过程中出现的常见错误的解决方法,填坑!!!
是排错的时候从[rosrun] Couldn‘t find executable named turtle_node below /opt/ros/noetic/share/turtlesim看到的
rosdep update错误的时候,用2022/2023解决ROS rosdep init/update,成功率百分百亲测可用
Ubuntu20.04安装ros noetic最简单教程。(包括适用于ARM开发板安装方法)
等修改py文件的方法还是没用
再次安装好gazero

几个编译错误
Errors << gazebo_msgs
https://blog.csdn.net/For_Air_/article/details/135679225
gazebo_ros_controlConfig
https://blog.csdn.net/HITXJ/article/details/104337279
配置成功!!!
finally!
飞起来了!!!

用键盘控制无人机飞行
三个终端
在一个终端运行
cd ~/PX4_Firmware
roslaunch px4 indoor1.launch
● 注意,用ctrl+c关闭仿真进程,有可能没有把Gazebo的相关进程关干净,这样再启动仿真时可能会报错。如果出现这种情况,可以用killall -9 gzclient,killall -9 gzserver 这两个命令强行关闭gazebo所有进程。
Gazebo启动后,在另一个终端运行(注意要等Gazebo完全启动完成,或者可能脚本会报错)
cd ~/XTDrone/communication/
python multirotor_communication.py iris 0
与0号iris建立通信后,在另一个终端运行
cd ~/XTDrone/control/keyboard
python multirotor_keyboard_control.py iris 1 vel
便可以通过键盘控制1架iris的解锁/上锁(arm/disarm),修改飞行模式,飞机速度等。
使用v起飞利用的是takeoff飞行模式,相关参数(起飞速度、高度)要在rcS中设置。
一般可以使用offboard模式起飞,这时起飞速度要大于0.3m/s才能起飞(即:upward velocity 需要大于0.3)。
注意,飞机要先解锁才能起飞!飞到一定高度后可以切换为‘hover’模式悬停,再运行自己的飞行脚本,或利用键盘控制飞机。
推荐起飞流程,按i把向上速度加到0.3以上,再按b切offboard模式,最后按t解锁。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号