强化学习基础系列(二):Policy Iteration, Value Iteration
0x1 强化学习基本分类
在上一篇文章中,我们介绍了强化学习的基本概念以及基本的模型定义。现在我们来对强化学习做一个基本的分类,强化学习方法,根据是否直接优化policy,可以分为value-based 方法和policy-based方法,value-based方法就是去计算状态的价值,根据价值不断优化从而推导出最优policy,而policy-based方法则直接对policy进行优化。另一种分类方法是model-free和model-based方法。
0x2 动态规划(Dynamic Programing, DP)
这种方法建立在知道MDP的转移概率和reward function的基础上进行的。动态规划方法有两种,一种是策略迭代 (policy iteration),另一种是价值迭代 (value iteration)。
策略迭代
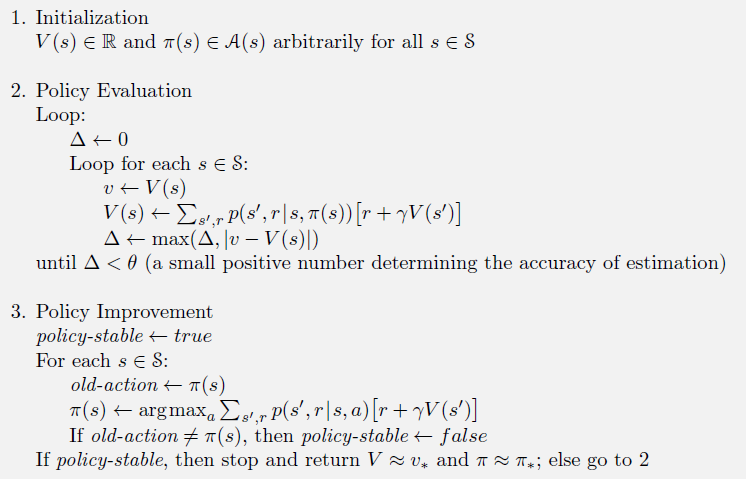
策略迭代分为策略评估(policy evaluatation)和策略改进(policy improvement)两步,策略评估使用bellman期望方程,对当前所采用的策略不断迭代,来获得对状态的value function,然后用策略改进,根据得到的value function来产生更优的策略,如此循环,从而得到最优策略。
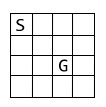
代码实现使用的环境是一个4x4的grid,在(2,2)处是terminal state,从(0,0)处出发,每走一步-1 reward。
- env code:
import numpy as np
class Grid:
def __init__(self, width=4, height=4, goal=(2,2)):
self.width = width
self.height = height
self.goal = goal
self.move = {0:(0,1),1:(0,-1),2:(1,0),3:(-1,0)}
#0:down 1:up 2:right 3:left
self.pos=(0,0)
self.done = False
self.stepReward = -1
self.winReward = 0
def step(self,a):
x,y = self.pos
x += self.move[a][0]
y += self.move[a][1]
if self.checkLegal(x,y):
self.pos = (x,y)
reward = self.stepReward
if self.pos == self.goal:
self.done = True
reward = self.winReward
return reward, self.pos, self.done
def reset(self):
self.pos = (0,0)
self.done = False
return self.pos
def checkLegal(self,x,y):
return not(x < 0 or y < 0 or x >= self.width or y >= self.height)
def render(self):
for i in range(self.height):
s = " "
for j in range(self.width):
if j == self.pos[0] and i == self.pos[1]:
s +='P'
elif j == self.goal[0] and i == self.goal[1]:
s+='G'
else:
s+='-'
print(s)
print(self.pos)
print()
- policy iteration code:
import numpy as np
from env import *
def print_policy(width, height,policy,goal):
dic={0:'D',1:'U',2:'R',3:'L'}
for i in range(height):
s = ""
for j in range(width):
if (j,i) == goal:
s += "S"
else:
s += dic[policy[(j,i)]]
print(s)
print()
GAMMA = 0.95
EPS = 1e-3
grid = Grid()
width = grid.width
height = grid.height
policy={}
value ={}
for i in range(width):
for j in range(height):
if not(i == grid.goal[0] and j == grid.goal[1]):
policy[(i,j)] = np.random.randint(4)
value[(i,j)] = 0
cnt = 0
while True:
while True:
delta = 0
for pos in policy:
grid.pos = pos
a = policy[pos]
r,pos_, _ = grid.step(a)
v = value[pos]
v_ = r + GAMMA * value[pos_]
value[pos] = v_
delta = max(np.abs(v-v_),delta)
if delta < EPS:
break
cnt += 1
print("iteration: ",cnt)
print(value)
print_policy(width,height,policy,grid.goal)
is_stable = True
for pos in policy:
max_v = float('-inf')
max_a = 0
for a in range(4):
grid.pos = pos
r,pos_,_ = grid.step(a)
v = r + GAMMA * value[pos_]
if max_v < v:
max_v = v
max_a = a
if not policy[pos] == max_a:
policy[pos] = max_a
is_stable=False
if is_stable:
break
价值迭代
价值迭代则是直接根据bellman最优方程而来,每次价值函数的更新选用能采取的动作中能得到的\(\gamma V(s^{’}) + r\)中的最大值。在迭代一定程度收敛后,此时的value function已然是最优的function,直接使用 greedy策略,每次选取value function最大的作为下一步的动作。
 ![pseudocode of value iteration]()
![pseudocode of value iteration]()
- value iteration code:
import numpy as np
from env import Grid
def print_policy(width, height,policy,goal):
dic={0:'D',1:'U',2:'R',3:'L'}
for i in range(height):
s = ""
for j in range(width):
if (j,i) == goal:
s += "S"
else:
s += dic[policy[(j,i)]]
print(s)
print()
GAMMA = 0.95
EPS = 1e-3
grid = Grid()
width = grid.width
height = grid.height
policy={}
value ={}
for i in range(width):
for j in range(height):
value[(i,j)] = 0
print(value)
cnt = 0
while True:
delta = 0
for pos in value:
if pos == grid.goal:
continue
v = value[pos]
max_v = float('-inf')
for a in range(4):
grid.pos = pos
r,pos_, _ = grid.step(a)
v_ = r + GAMMA * value[pos_]
max_v = max(max_v, v_)
value[pos] = max_v
delta = max(np.abs(v-max_v),delta)
if delta < EPS:
break
cnt += 1
print("iteration: ",cnt)
print(value)
for pos in value:
max_v = float('-inf')
max_a = 0
for a in range(4):
grid.pos = pos
r,pos_,_ = grid.step(a)
v_ = r + GAMMA* value[pos_]
if max_v < v_:
max_v = v_
max_a = a
policy[pos] = max_a
print_policy(width,height,policy,grid.goal)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号