Linux内存管理 (9)mmap(补充)
之前写过一篇简单的介绍mmap()/munmap()的文章《Linux内存管理 (9)mmap》,比较单薄,这里详细的梳理一下。
从常用的使用者角度介绍两个函数的使用;然后重点是分析内核的实现流程;最后对mmap()/munmap()进行一些验证测试。
mmap系统调用并不完全是为了共享内存而设计的,它本身提供了不同于一般对普通文件的访问方式,进程可以像读写内存一样对普通文件操作。
mmap系统调用使得进程之间通过映射同一个普通文件实现共享内存。普通文件被映射到进程地址空间后,进程可以像访问普通内存一样对文件进行访问,不必再调用read()/write()等操作。
mmap并不分配空间,只是将文件映射到调用进程的地址空间里(占用虚拟地址空间),然后就可以使用memcpy()等操作,内存中内容并不立即更行到文件中,而是有一段时间的延迟,可以使用msync()显式同步。
取消内存映射通过munmap()。
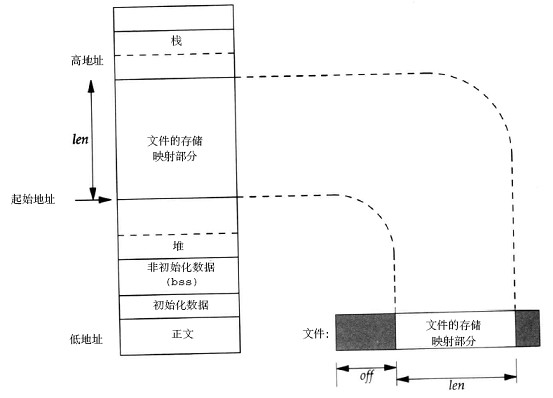
下面这张图示意了mmap的内存映射,起始地址是返回的addr,off和len分别对应参数offset和length。
1. mmap API解释
对mmap()/munmap()的使用比较简单,有两个参数组合导致了多样性,分别是prot和flags。
#include <sys/mman.h> void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset); int munmap(void *addr, size_t length);
下面对这些参数做一个简单的介绍:
- addr:如果不为NULL,内核会在此地址创建映射;否则,内核会选择一个合适的虚拟地址。大部分情况不指定虚拟地址,意义不大,而是让内核选择返回一个地址给用户空间使用。
- length:表示映射到进程地址空间的大小。
- prot:内存区域的读/写/执行属性。
- flags:内存映射的属性,共享、私有、匿名、文件等。
- fd:表示这是一个文件映射,fd是打开文件的句柄。如果是文件映射,需要指定fd;匿名映射就指定一个特殊的-1。
- offset:在文件映射时,表示相对文件头的偏移量;返回的地址是偏移量对应的虚拟地址。
1.1 mmap优点
1.1.1 提升效率
一般读写文件需要open、read、write,需要先将磁盘文件读取到内核cache缓冲区,然后再拷贝到用户空间内存区,设计两次读写操作。
mmap通过将磁盘文件映射到用户空间,当进程读文件时,发生缺页中断,给虚拟内存分配对应的物理内存,在通过磁盘调页操作将磁盘数据读到物理内存上,实现了用户空间数据的读取,整个过程只有一次内存拷贝。
1.1.2 用于进程间大数据量通信
两个进程映射同一个文件,在两个进程中,同一个文件区域映射的虚拟地址空间不同。一个进程操作文件时,先通过缺页获取物理内存,进而通过磁盘文件调页操作将文件数据读入内存。
另一个进程访问文件的时候,发现没有物理页面映射到虚拟内存,通过fs的缺页处理查找cache区是否有读入磁盘文件,有的话建立映射关系,这样两个进程通过共享内存就可以进行通信。

1.1.3 文件关闭,内存可以继续使用
因为在内核中已经通过fd找到对应的磁盘文件,从而将文件跟vma关联。
1.2 mmap缺点
映射时文件长度已经确定,没法通过mmap访问操作len的区间。
1.3 私有/共享、文件/匿名映射组合
共有四种组合,下面逐一介绍。
1.3.1 私有文件映射
多个进程使用同样的物理页面进行初始化,但是各个进程对内存文件的修改不会共享,也不会反映到物理文件中。
比如对linux .so动态库文件就采用这种方式映射到各个进程虚拟地址空间中。
1.3.2 私有匿名映射
mmap会创建一个新的映射,各个进程不共享,主要用于分配内存(malloc分配大内存会调用mmap)。
1.3.3 共享文件映射
多个进程通过虚拟内存技术共享同样物理内存,对内存文件的修改会反应到实际物理内存中,也是进程间通信的一种。
1.3.4 共享匿名映射
这种机制在进行fork时不会采用写时复制,父子进程完全共享同样的物理内存页,也就是父子进程通信。
2. mmap内核实现
系统调用的入口是entry_SYSCALL_64_fastpath,然后根据系统调用号在sys_call_table中找到对应的函数。
mmap()和munmap()对应的系统调用分别是SyS_mmap()和SyS_munmap()下面就来分析一下实现。
2.0 mmap/munmap调用路径
在分析具体内核实现之前,通过脚本来看看mmap/munmap调用路径。
通过增加set_ftrace_filter的函数,修改current_tracer发现函数的调用者,逐步丰富调用路径。
#!/bin/bash DPATH="/sys/kernel/debug/tracing" PID=$$ ## Quick basic checks [ `id -u` -ne 0 ] && { echo "needs to be root" ; exit 1; } # check for root permissions [ -z $1 ] && { echo "needs process name as argument" ; exit 1; } # check for args to this function mount | grep -i debugfs &> /dev/null [ $? -ne 0 ] && { echo "debugfs not mounted, mount it first"; exit 1; } #checks for debugfs mount # flush existing trace data echo > $DPATH/trace echo nop > $DPATH/current_tracer echo > $DPATH/set_ftrace_filter echo "SyS_mmap SyS_mmap_pgoff SyS_munmap SyS_open SyS_read SyS_write SyS_close SyS_brk SyS_msync" >> $DPATH/set_ftrace_filter echo "do_brk elf_map load_elf_binary" >> $DPATH/set_ftrace_filter echo "do_mmap do_munmap get_unmapped_area mmap_region vm_mmap vm_munmap vm_mmap_pgoff" >> $DPATH/set_ftrace_filter echo "__split_vma* unmap_region" >> $DPATH/set_ftrace_filter # set function tracer echo function_graph > $DPATH/current_tracer # write current process id to set_ftrace_pid file echo $PID > $DPATH/set_ftrace_pid #echo "common_pid==$PID" > /sys/kernel/debug/tracing/events/syscalls/sys_enter_mmap/filter #echo 1 > /sys/kernel/debug/tracing/events/syscalls/sys_enter_mmap/enable #echo "common_pid==$PID" > /sys/kernel/debug/tracing/events/syscalls/sys_enter_munmap/filter #echo 1 > /sys/kernel/debug/tracing/events/syscalls/sys_enter_munmap/enable # start the tracing echo 1 > $DPATH/tracing_on # execute the process exec $* #sudo cat $DPATH/trace > /home/al/v4l2/trace.txt
最后使用function_graph跟踪器查看调用关系如下:
1) | SyS_mmap() { 1) | SyS_mmap_pgoff() { 1) | vm_mmap_pgoff() { 1) | do_mmap() { 1) 0.548 us | get_unmapped_area(); 1) 3.388 us | mmap_region(); 1) 4.598 us | } 1) 5.286 us | } 1) 5.756 us | } 1) 6.058 us | } 1) | SyS_munmap() { 1) | vm_munmap() { 1) | do_munmap() { 1) + 99.985 us | unmap_region(); 1) ! 101.439 us | } 1) ! 101.838 us | } 1) ! 102.410 us | }
下面就围绕这条路径展开分析。
2.1 mmap()
mmap()系统调用的核心是do_mmap(),可以分为三部分。
第一部分通过get_unmapped_area()函数,找到一段虚拟地址,范围是[addr, addr+len]。
用户进程一般不会指定addr,也就是由内核指定这个虚拟空间的首地址addr在哪里。
在函数do_mmap_pgoff()调用get_unmapped_area()之前会预指定addr,通过round_hint_to_min()实现,然后用这个预指定addr为参数调用get_unmapped_area()。
第二部分确定vma线性区的flags,针对文件、匿名,私有、共享有所不同。
第三部分是实际创建vma先行区,通过函数mmap_region()实现。
asmlinkage unsigned long sys_mmap (unsigned long addr, unsigned long len, int prot, int flags, int fd, long off) { if (offset_in_page(off) != 0) return -EINVAL; addr = sys_mmap_pgoff(addr, len, prot, flags, fd, off >> PAGE_SHIFT); if (!IS_ERR((void *) addr)) force_successful_syscall_return(); return addr; } SYSCALL_DEFINE6(mmap_pgoff, unsigned long, addr, unsigned long, len, unsigned long, prot, unsigned long, flags, unsigned long, fd, unsigned long, pgoff) { struct file *file = NULL; unsigned long retval; if (!(flags & MAP_ANONYMOUS)) {------------------------------------------对非匿名文件映射的检查,必须能根据文件句柄找到struct file。 audit_mmap_fd(fd, flags); file = fget(fd); if (!file) return -EBADF; if (is_file_hugepages(file)) len = ALIGN(len, huge_page_size(hstate_file(file)));-------------根据file->f_op来判断是否是hugepage,然后进行hugepage页面对齐。 retval = -EINVAL; if (unlikely(flags & MAP_HUGETLB && !is_file_hugepages(file))) goto out_fput; } else if (flags & MAP_HUGETLB) { struct user_struct *user = NULL; struct hstate *hs; hs = hstate_sizelog((flags >> MAP_HUGE_SHIFT) & SHM_HUGE_MASK); if (!hs) return -EINVAL; len = ALIGN(len, huge_page_size(hs)); /* * VM_NORESERVE is used because the reservations will be * taken when vm_ops->mmap() is called * A dummy user value is used because we are not locking * memory so no accounting is necessary */ file = hugetlb_file_setup(HUGETLB_ANON_FILE, len, VM_NORESERVE, &user, HUGETLB_ANONHUGE_INODE, (flags >> MAP_HUGE_SHIFT) & MAP_HUGE_MASK); if (IS_ERR(file)) return PTR_ERR(file); } flags &= ~(MAP_EXECUTABLE | MAP_DENYWRITE); retval = vm_mmap_pgoff(file, addr, len, prot, flags, pgoff); out_fput: if (file) fput(file); return retval; } unsigned long vm_mmap_pgoff(struct file *file, unsigned long addr, unsigned long len, unsigned long prot, unsigned long flag, unsigned long pgoff) { unsigned long ret; struct mm_struct *mm = current->mm; unsigned long populate; ret = security_mmap_file(file, prot, flag); if (!ret) { down_write(&mm->mmap_sem); ret = do_mmap_pgoff(file, addr, len, prot, flag, pgoff, &populate); up_write(&mm->mmap_sem); if (populate) mm_populate(ret, populate); } return ret; } unsigned long do_mmap(struct file *file, unsigned long addr, unsigned long len, unsigned long prot, unsigned long flags, vm_flags_t vm_flags, unsigned long pgoff, unsigned long *populate) { struct mm_struct *mm = current->mm; *populate = 0; if (!len) return -EINVAL; if ((prot & PROT_READ) && (current->personality & READ_IMPLIES_EXEC)) if (!(file && path_noexec(&file->f_path))) prot |= PROT_EXEC; if (!(flags & MAP_FIXED))-------------------------------------------------对于非MAP_FIXED,addr不能小于mmap_min_addr大小,如果小于则使用mmap_min_addr页对齐后的地址。 addr = round_hint_to_min(addr); /* Careful about overflows.. */ len = PAGE_ALIGN(len); if (!len)-----------------------------------------------------------------这里不是判断len是否为0,而是检查len是否溢出。 return -ENOMEM; /* offset overflow? */ if ((pgoff + (len >> PAGE_SHIFT)) < pgoff)--------------------------------检查offset是否溢出 return -EOVERFLOW; /* Too many mappings? */ if (mm->map_count > sysctl_max_map_count)---------------------------------进程中mmap个数限制,超出返回ENOMEM错误。 return -ENOMEM; addr = get_unmapped_area(file, addr, len, pgoff, flags);------------------在创建新的ma区域之前首先寻找一块足够大小的空闲区域,本函数就是用于查找未映射的区域,返回值addr就是这段空间的首地址。 if (offset_in_page(addr)) return addr; vm_flags |= calc_vm_prot_bits(prot) | calc_vm_flag_bits(flags) | mm->def_flags | VM_MAYREAD | VM_MAYWRITE | VM_MAYEXEC;------------根据prot/flags以及mm->flags来得到vm_flags。 if (flags & MAP_LOCKED) if (!can_do_mlock()) return -EPERM; if (mlock_future_check(mm, vm_flags, len)) return -EAGAIN; if (file) {---------------------------------------------------------------文件映射情况处理,主要更新vm_flags。 struct inode *inode = file_inode(file); if (!file_mmap_ok(file, inode, pgoff, len)) return -EOVERFLOW; switch (flags & MAP_TYPE) { case MAP_SHARED:------------------------------------------------------共享文件映射 if ((prot&PROT_WRITE) && !(file->f_mode&FMODE_WRITE)) return -EACCES; if (IS_APPEND(inode) && (file->f_mode & FMODE_WRITE)) return -EACCES; if (locks_verify_locked(file)) return -EAGAIN; vm_flags |= VM_SHARED | VM_MAYSHARE; if (!(file->f_mode & FMODE_WRITE)) vm_flags &= ~(VM_MAYWRITE | VM_SHARED); case MAP_PRIVATE:-----------------------------------------------------私有文件映射 if (!(file->f_mode & FMODE_READ)) return -EACCES; if (path_noexec(&file->f_path)) { if (vm_flags & VM_EXEC) return -EPERM; vm_flags &= ~VM_MAYEXEC; } if (!file->f_op->mmap) return -ENODEV; if (vm_flags & (VM_GROWSDOWN|VM_GROWSUP)) return -EINVAL; break; default: return -EINVAL; } } else {------------------------------------------------------------------匿名映射情况处理 switch (flags & MAP_TYPE) { case MAP_SHARED:------------------------------------------------------共享匿名映射 if (vm_flags & (VM_GROWSDOWN|VM_GROWSUP)) return -EINVAL; pgoff = 0;--------------------------------------------------------为什么为0? vm_flags |= VM_SHARED | VM_MAYSHARE; break; case MAP_PRIVATE:-----------------------------------------------------私有匿名映射 pgoff = addr >> PAGE_SHIFT; break; default: return -EINVAL; } } if (flags & MAP_NORESERVE) { /* We honor MAP_NORESERVE if allowed to overcommit */ if (sysctl_overcommit_memory != OVERCOMMIT_NEVER) vm_flags |= VM_NORESERVE; /* hugetlb applies strict overcommit unless MAP_NORESERVE */ if (file && is_file_hugepages(file)) vm_flags |= VM_NORESERVE; } addr = mmap_region(file, addr, len, vm_flags, pgoff);--------------------实际创建vma if (!IS_ERR_VALUE(addr) && ((vm_flags & VM_LOCKED) || (flags & (MAP_POPULATE | MAP_NONBLOCK)) == MAP_POPULATE)) *populate = len; return addr; }
get_unmapped_area()根据输入的addr,以及其它参数通过get_area()来找到一个满足条件的虚拟空间,返回这个虚拟空间的首地址。
get_area()是一个函数指针,有两种可能使用mm->get_unmapped_area()或者file->f_op->get_unmapped_area()。
unsigned long get_unmapped_area(struct file *file, unsigned long addr, unsigned long len, unsigned long pgoff, unsigned long flags) { unsigned long (*get_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long); unsigned long error = arch_mmap_check(addr, len, flags); if (error) return error; /* Careful about overflows.. */ if (len > TASK_SIZE) return -ENOMEM; get_area = current->mm->get_unmapped_area;------------使用mm_struct->get_unmapped_area()方法,即arch_get_unmapped_area()。 if (file && file->f_op->get_unmapped_area)------------如果是文件映射,并且该文件的file_operations定义了get_unmapped_area方法,那么使用它实现定位虚拟区间。 get_area = file->f_op->get_unmapped_area; addr = get_area(file, addr, len, pgoff, flags); if (IS_ERR_VALUE(addr)) return addr; if (addr > TASK_SIZE - len) return -ENOMEM; if (offset_in_page(addr)) return -EINVAL; addr = arch_rebalance_pgtables(addr, len); error = security_mmap_addr(addr); return error ? error : addr; }
看arch_get_unmapped_area()名字就知道,可能有各架构自己的实现函数。这里以平台无关的函数进行分析。
arch_get_unmapped_area()完成从低地址向高地址创建新的映射,而arch_get_unmapped_area_topdown()完成从高地址向低地址创建新的映射。
unsigned long arch_get_unmapped_area(struct file *filp, unsigned long addr, unsigned long len, unsigned long pgoff, unsigned long flags) { struct mm_struct *mm = current->mm; struct vm_area_struct *vma; int do_align = 0; int aliasing = cache_is_vipt_aliasing(); struct vm_unmapped_area_info info; if (aliasing) do_align = filp || (flags & MAP_SHARED); if (flags & MAP_FIXED) {------------------这里可以看出MAP_FIXED不参与选址,固定地址创建。 if (aliasing && flags & MAP_SHARED && (addr - (pgoff << PAGE_SHIFT)) & (SHMLBA - 1)) return -EINVAL; return addr; } if (len > TASK_SIZE) return -ENOMEM; if (addr) {--------------------------------当addr非0,表示制定了一个特定的优先选用地址,内核会检查该区域是否与现存区域重叠,有find_vma()完成查找功能。 if (do_align) addr = COLOUR_ALIGN(addr, pgoff); else addr = PAGE_ALIGN(addr); vma = find_vma(mm, addr); if (TASK_SIZE - len >= addr && (!vma || addr + len <= vm_start_gap(vma))) return addr; } info.flags = 0; info.length = len; info.low_limit = mm->mmap_base; info.high_limit = TASK_SIZE; info.align_mask = do_align ? (PAGE_MASK & (SHMLBA - 1)) : 0; info.align_offset = pgoff << PAGE_SHIFT; return vm_unmapped_area(&info);-----------当addr为空或者指定的优选地址不满足分配条件时,内核必须遍历进程中可用的区域,设法找到一个大小适当的空闲区域,vm_unmapped_area()完成实际的工作。 } static inline unsigned long vm_unmapped_area(struct vm_unmapped_area_info *info) { if (info->flags & VM_UNMAPPED_AREA_TOPDOWN) return unmapped_area_topdown(info);--从高地址到低地址穿点映射。 else return unmapped_area(info);----------从低地址到高地址创建映射。 } unsigned long unmapped_area(struct vm_unmapped_area_info *info) { /* * We implement the search by looking for an rbtree node that * immediately follows a suitable gap. That is, * - gap_start = vma->vm_prev->vm_end <= info->high_limit - length; * - gap_end = vma->vm_start >= info->low_limit + length; * - gap_end - gap_start >= length */ struct mm_struct *mm = current->mm; struct vm_area_struct *vma; unsigned long length, low_limit, high_limit, gap_start, gap_end; /* Adjust search length to account for worst case alignment overhead */ length = info->length + info->align_mask; if (length < info->length) return -ENOMEM; /* Adjust search limits by the desired length */ if (info->high_limit < length) return -ENOMEM; high_limit = info->high_limit - length; if (info->low_limit > high_limit) return -ENOMEM; low_limit = info->low_limit + length; /* Check if rbtree root looks promising */ if (RB_EMPTY_ROOT(&mm->mm_rb)) goto check_highest; vma = rb_entry(mm->mm_rb.rb_node, struct vm_area_struct, vm_rb); if (vma->rb_subtree_gap < length) goto check_highest; while (true) { /* Visit left subtree if it looks promising */ gap_end = vm_start_gap(vma);----------------------------------先从低地址开始查询。 if (gap_end >= low_limit && vma->vm_rb.rb_left) { struct vm_area_struct *left = rb_entry(vma->vm_rb.rb_left, struct vm_area_struct, vm_rb); if (left->rb_subtree_gap >= length) { vma = left; continue; } } gap_start = vma->vm_prev ? vm_end_gap(vma->vm_prev) : 0;------当前结点rb_subtree_gap已经是最后一个可能满足这次分配。 check_current: /* Check if current node has a suitable gap */ if (gap_start > high_limit) return -ENOMEM; if (gap_end >= low_limit && gap_end > gap_start && gap_end - gap_start >= length) goto found; /* Visit right subtree if it looks promising */ if (vma->vm_rb.rb_right) { struct vm_area_struct *right = rb_entry(vma->vm_rb.rb_right, struct vm_area_struct, vm_rb); if (right->rb_subtree_gap >= length) { vma = right; continue; } } /* Go back up the rbtree to find next candidate node */ while (true) { struct rb_node *prev = &vma->vm_rb; if (!rb_parent(prev)) goto check_highest; vma = rb_entry(rb_parent(prev), struct vm_area_struct, vm_rb); if (prev == vma->vm_rb.rb_left) { gap_start = vm_end_gap(vma->vm_prev); gap_end = vm_start_gap(vma); goto check_current; } } } check_highest: /* Check highest gap, which does not precede any rbtree node */ gap_start = mm->highest_vm_end; gap_end = ULONG_MAX; /* Only for VM_BUG_ON below */ if (gap_start > high_limit) return -ENOMEM; found: /* We found a suitable gap. Clip it with the original low_limit. */ if (gap_start < info->low_limit) gap_start = info->low_limit; /* Adjust gap address to the desired alignment */ gap_start += (info->align_offset - gap_start) & info->align_mask; VM_BUG_ON(gap_start + info->length > info->high_limit); VM_BUG_ON(gap_start + info->length > gap_end); return gap_start; }
mmap_region()首先调用find_vma_links()查找是否已有vma线性区包含addr,如果有调用do_munmap()把这个vma干掉。
Linux不希望vma和vma之间存在空洞,只要新创建vma的flags属性和前面或者后面vma仙童,就尝试合并成一个新的vma,减少slab缓存消耗量,同时也减少了空洞浪费。
如果无法合并,那么只好新创建vma并对vma结构体初始化先关成员;根据vma是否有页锁定标志(VM_LOCKED),决定是否立即分配物理页。
最后将新建的vma插入进程空间vma红黑树中,并返回addr。
unsigned long mmap_region(struct file *file, unsigned long addr, unsigned long len, vm_flags_t vm_flags, unsigned long pgoff) { struct mm_struct *mm = current->mm; struct vm_area_struct *vma, *prev; int error; struct rb_node **rb_link, *rb_parent; unsigned long charged = 0; /* Check against address space limit. */ if (!may_expand_vm(mm, len >> PAGE_SHIFT)) {--------------------检查当前total_vm+len是否查过RLIMIT_AS,确保虚拟映射可以进行。 unsigned long nr_pages; if (!(vm_flags & MAP_FIXED)) return -ENOMEM; nr_pages = count_vma_pages_range(mm, addr, addr + len); if (!may_expand_vm(mm, (len >> PAGE_SHIFT) - nr_pages)) return -ENOMEM; } while (find_vma_links(mm, addr, addr + len, &prev, &rb_link, &rb_parent)) {-----------------------------------遍历该进程已有的vma红黑树,如果找到vma覆盖[addr, end]区域,那么返回0,表示找到。如果覆盖已有的vma区域,返回ENOMEM。 if (do_munmap(mm, addr, len))------------------------------存在覆盖已有区域的情况,那么尝试取munmap这块区域。如果munmap成功返回0,不成功则mmap_region()失败。 return -ENOMEM; } if (accountable_mapping(file, vm_flags)) { charged = len >> PAGE_SHIFT; if (security_vm_enough_memory_mm(mm, charged)) return -ENOMEM; vm_flags |= VM_ACCOUNT; } vma = vma_merge(mm, prev, addr, addr + len, vm_flags, NULL, file, pgoff, NULL, NULL_VM_UFFD_CTX);-----------------------至此表示已经可以找到合适的vma区域,原有映射是否可以被新的映射复用,减少因为vma导致的slab消耗和虚拟内存的空洞。 if (vma) goto out; vma = kmem_cache_zalloc(vm_area_cachep, GFP_KERNEL);----------------------在没有找到的情况下,新建一个vma。 if (!vma) { error = -ENOMEM; goto unacct_error; } vma->vm_mm = mm;---------------------------------------------------------初始化vma数据 vma->vm_start = addr; vma->vm_end = addr + len; vma->vm_flags = vm_flags; vma->vm_page_prot = vm_get_page_prot(vm_flags);---------------------------设置vma区域内页面属性。 vma->vm_pgoff = pgoff; INIT_LIST_HEAD(&vma->anon_vma_chain); if (file) {--------------------------------------------------------------如果是文件映射 if (vm_flags & VM_DENYWRITE) { error = deny_write_access(file); if (error) goto free_vma; } if (vm_flags & VM_SHARED) { error = mapping_map_writable(file->f_mapping); if (error) goto allow_write_and_free_vma; } vma->vm_file = get_file(file); error = file->f_op->mmap(file, vma);---------------------------------调用文件操作函数集的mmap成员。 if (error) goto unmap_and_free_vma; WARN_ON_ONCE(addr != vma->vm_start); addr = vma->vm_start; vm_flags = vma->vm_flags; } else if (vm_flags & VM_SHARED) {--------------------------------------共享匿名区 error = shmem_zero_setup(vma); if (error) goto free_vma; } vma_link(mm, vma, prev, rb_link, rb_parent);----------------------------将新建的vma插入到进程地址空间的vma红黑树中,已经做一些计数更新等。 /* Once vma denies write, undo our temporary denial count */ if (file) { if (vm_flags & VM_SHARED) mapping_unmap_writable(file->f_mapping); if (vm_flags & VM_DENYWRITE) allow_write_access(file); } file = vma->vm_file; out: perf_event_mmap(vma); vm_stat_account(mm, vm_flags, file, len >> PAGE_SHIFT); if (vm_flags & VM_LOCKED) { if (!((vm_flags & VM_SPECIAL) || is_vm_hugetlb_page(vma) || vma == get_gate_vma(current->mm))) mm->locked_vm += (len >> PAGE_SHIFT); else vma->vm_flags &= VM_LOCKED_CLEAR_MASK; } if (file) uprobe_mmap(vma); vma->vm_flags |= VM_SOFTDIRTY; vma_set_page_prot(vma);-------------------------------------设置vma区域内页面属性。 return addr; unmap_and_free_vma: vma->vm_file = NULL; fput(file); /* Undo any partial mapping done by a device driver. */ unmap_region(mm, vma, prev, vma->vm_start, vma->vm_end); charged = 0; if (vm_flags & VM_SHARED) mapping_unmap_writable(file->f_mapping); allow_write_and_free_vma: if (vm_flags & VM_DENYWRITE) allow_write_access(file); free_vma: kmem_cache_free(vm_area_cachep, vma); unacct_error: if (charged) vm_unacct_memory(charged); return error; }
参考文档:《linux进程地址空间(3) 内存映射(1)mmap与do_mmap》、《进程地址空间 get_unmmapped_area()》
2.2 munmap
检查目标地址在当前进程的虚拟空间是否已经在使用,如果已经在使用就要将老的映射撤销,要是这个操作失败,则goto free_vma。因为flags的标志位为MAP_FIXED为1时,并未对此检查。
munmap()用于解除内存映射,其核心函数式do_munmap()。
SYSCALL_DEFINE2(munmap, unsigned long, addr, size_t, len) { profile_munmap(addr); return vm_munmap(addr, len); } int vm_munmap(unsigned long start, size_t len) { int ret; struct mm_struct *mm = current->mm; down_write(&mm->mmap_sem); ret = do_munmap(mm, start, len); up_write(&mm->mmap_sem); return ret; } int do_munmap(struct mm_struct *mm, unsigned long start, size_t len) { unsigned long end; struct vm_area_struct *vma, *prev, *last; if ((offset_in_page(start)) || start > TASK_SIZE || len > TASK_SIZE-start) return -EINVAL; len = PAGE_ALIGN(len); if (len == 0) return -EINVAL; /* Find the first overlapping VMA */ vma = find_vma(mm, start);-----------------找到起始地址落在哪个vma内。 if (!vma)----------------------------------如果没有找到的话,直接返回0。 return 0; prev = vma->vm_prev; end = start + len; if (vma->vm_start >= end)------------------如果要释放空间的结束地址都小于vma起始地址,说明这两者没有重叠,直接退出。 return 0; if (start > vma->vm_start) { int error; if (end < vma->vm_end && mm->map_count >= sysctl_max_map_count) return -ENOMEM; error = __split_vma(mm, vma, start, 0);----由于start>vma->vm_start,说明要释放空间和vm_start有一段空隙。这里就是分离这段gap。 if (error) return error; prev = vma; } last = find_vma(mm, end);----------------------找到要释放空间结束地址的vma。 if (last && end > last->vm_start) { int error = __split_vma(mm, last, end, 1);-如果if成立,说明要释放空间end和vm_start之间有gap,就需要分离这段gap。 if (error) return error; } vma = prev ? prev->vm_next : mm->mmap; if (mm->locked_vm) { struct vm_area_struct *tmp = vma; while (tmp && tmp->vm_start < end) { if (tmp->vm_flags & VM_LOCKED) { mm->locked_vm -= vma_pages(tmp); munlock_vma_pages_all(tmp);-------如果这段空间是VM_LOCKED,就需要unlock。 } tmp = tmp->vm_next; } } detach_vmas_to_be_unmapped(mm, vma, prev, end); unmap_region(mm, vma, prev, start, end);------释放实际占用的页面。 arch_unmap(mm, vma, start, end); /* Fix up all other VM information */ remove_vma_list(mm, vma);---------------------删除mm_struct结构中的vma信息。 return 0; } static void unmap_region(struct mm_struct *mm, struct vm_area_struct *vma, struct vm_area_struct *prev, unsigned long start, unsigned long end) { struct vm_area_struct *next = prev ? prev->vm_next : mm->mmap; struct mmu_gather tlb; lru_add_drain(); tlb_gather_mmu(&tlb, mm, start, end); update_hiwater_rss(mm); unmap_vmas(&tlb, vma, start, end);---------扫描线性地址空间的所有页表项 free_pgtables(&tlb, vma, prev ? prev->vm_end : FIRST_USER_ADDRESS, next ? next->vm_start : USER_PGTABLES_CEILING);---回收上一步已经清空的进程页表。 tlb_finish_mmu(&tlb, start, end);----------刷新TLB,在多处理器系统中,调用freepages_and_swap_cache()释放页框。 } void unmap_vmas(struct mmu_gather *tlb, struct vm_area_struct *vma, unsigned long start_addr, unsigned long end_addr) { struct mm_struct *mm = vma->vm_mm; mmu_notifier_invalidate_range_start(mm, start_addr, end_addr); for ( ; vma && vma->vm_start < end_addr; vma = vma->vm_next) unmap_single_vma(tlb, vma, start_addr, end_addr, NULL); mmu_notifier_invalidate_range_end(mm, start_addr, end_addr); }
参考文档:《内存管理API之do_munmap》《释放线性地址区间》。
2.3 msync()
进程对映射的内存空间内容改变并不直接回写到磁盘中,往往在调用munmap()后才执行操作。
msync()函数将映射内存空间内容同步到磁盘文件中。
SYSCALL_DEFINE3(msync, unsigned long, start, size_t, len, int, flags) { unsigned long end; struct mm_struct *mm = current->mm; struct vm_area_struct *vma; int unmapped_error = 0; int error = -EINVAL; if (flags & ~(MS_ASYNC | MS_INVALIDATE | MS_SYNC)) goto out; if (offset_in_page(start)) goto out; if ((flags & MS_ASYNC) && (flags & MS_SYNC)) goto out; error = -ENOMEM; len = (len + ~PAGE_MASK) & PAGE_MASK; end = start + len; if (end < start) goto out; error = 0; if (end == start) goto out; /* * If the interval [start,end) covers some unmapped address ranges, * just ignore them, but return -ENOMEM at the end. */ down_read(&mm->mmap_sem); vma = find_vma(mm, start); for (;;) { struct file *file; loff_t fstart, fend; /* Still start < end. */ error = -ENOMEM; if (!vma) goto out_unlock; /* Here start < vma->vm_end. */ if (start < vma->vm_start) { start = vma->vm_start; if (start >= end) goto out_unlock; unmapped_error = -ENOMEM; } /* Here vma->vm_start <= start < vma->vm_end. */ if ((flags & MS_INVALIDATE) && (vma->vm_flags & VM_LOCKED)) { error = -EBUSY; goto out_unlock; } file = vma->vm_file; fstart = (start - vma->vm_start) + ((loff_t)vma->vm_pgoff << PAGE_SHIFT); fend = fstart + (min(end, vma->vm_end) - start) - 1; start = vma->vm_end; if ((flags & MS_SYNC) && file && (vma->vm_flags & VM_SHARED)) { get_file(file); up_read(&mm->mmap_sem); error = vfs_fsync_range(file, fstart, fend, 1); fput(file); if (error || start >= end) goto out; down_read(&mm->mmap_sem); vma = find_vma(mm, start); } else { if (start >= end) { error = 0; goto out_unlock; } vma = vma->vm_next; } } out_unlock: up_read(&mm->mmap_sem); out: return error ? : unmapped_error; } int vfs_fsync_range(struct file *file, loff_t start, loff_t end, int datasync) { struct inode *inode = file->f_mapping->host; if (!file->f_op->fsync) return -EINVAL; if (!datasync && (inode->i_state & I_DIRTY_TIME)) { spin_lock(&inode->i_lock); inode->i_state &= ~I_DIRTY_TIME; spin_unlock(&inode->i_lock); mark_inode_dirty_sync(inode); } return file->f_op->fsync(file, start, end, datasync); }
2.4 malloc和brk()/mmap()关系
通过getconf PAGESIZE查看当前系统页面大小,可知当前系统页面大小为4096。
malloc()分配内存,并不一定都通过brk()进行;如果分配的内存达到128K,就要通过mmap进行。
#include<unistd.h> #include<stdio.h> #include<stdlib.h> #include<string.h> #include<sys/types.h> #include<sys/stat.h> #include<sys/mman.h> #define MAX (4096*31+4072) int main() { int i=0; char *array = (char *)malloc(MAX); for( i=0; i<MAX; ++i ) ++array[ i ]; free(array); return 0; }
下面就来看看MAX不同大小,对malloc的影响。
当MAX为(4096*31+4072)时,跟踪系统调用如下:
...
brk(0x244c000) = 0x244c000
brk(0x242c000) = 0x242c000
exit_group(0) = ?
+++ exited with 0 +++
当MAX为(4096*31+4073)时,跟踪系统调用如下:
...
mmap(NULL, 135168, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_ANONYMOUS, -1, 0) = 0x7f12b88c9000
munmap(0x7f12b88c9000, 135168) = 0
exit_group(0) = ?
+++ exited with 0 +++
可以看出当分配的内存接近128KB是,malloc()会对齐到128KB,并且附加了1页作为gap。实际分配的虚拟地址空间达到了132kB。
3. mmap测试
3.1 mmap()/munmap()相对于read()/write()优势
上面有提到mmap()后对内存的操作相对于普通的read()/write()速度更快,这里进行一个简单测试。
#include<unistd.h> #include<stdio.h> #include<stdlib.h> #include<string.h> #include<sys/types.h> #include<sys/stat.h> #include<sys/time.h> #include<fcntl.h> #include<sys/mman.h> #define MAX 1024*128 int main() { int i=0; int count=0, fd=0; struct timeval tv1, tv2; char *array = (char *)malloc(MAX); /*read*/ gettimeofday( &tv1, NULL ); fd = open( "./mmap_test", O_RDWR|O_CREAT, S_IRUSR|S_IWUSR); if(fd<0) printf("Open file failed\n"); if(MAX != read( fd, (char*)array, MAX )) { printf("Reading data failed...\n"); return -1; } memset(array, 'a', MAX); lseek(fd,0,SEEK_SET); if(MAX != write(fd, (void *)array, MAX)) { printf( "Writing data failed...\n" ); return -1; } close( fd ); gettimeofday( &tv2, NULL ); free( array ); printf( "Time of read/write: %ldus\n", (tv2.tv_usec - tv1.tv_usec)); /*mmap*/ gettimeofday( &tv1, NULL ); fd = open( "./mmap_test2", O_RDWR|O_CREAT, S_IRUSR|S_IWUSR); array = mmap( NULL, MAX, PROT_READ|PROT_WRITE, MAP_SHARED, fd, 0); memset(array, 'b', MAX); munmap( array, MAX ); msync( array, MAX, MS_SYNC ); close( fd ); gettimeofday( &tv2, NULL ); printf( "Time of mmap/munmap/msync: %ldus\n", (tv2.tv_usec - tv1.tv_usec)); return 0; }
首先创建两个128KB的空文件。
dd bs=1024 count=128 if=/dev/zero of=./mmap_test
dd bs=1024 count=128 if=/dev/zero of=./mmap_test2
两个文件内容分别变成了'A'和'B',可以看出mmap领先不少:
Time of read/write: 134us
Time of mmap/munmap/msync: 91us
3.2 mmap和/proc/xxx/maps解析
#include<stdio.h> #include<unistd.h> void main() { sleep(1000); }
通过strace执行如上应用,得到如下的系统调用过程。
execve("./sleep", ["./sleep"], [/* 77 vars */]) = 0
brk(NULL) = 0x1286000
access("/etc/ld.so.nohwcap", F_OK) = -1 ENOENT (No such file or directory)
access("/etc/ld.so.preload", R_OK) = -1 ENOENT (No such file or directory)
open("/etc/ld.so.cache", O_RDONLY|O_CLOEXEC) = 3
fstat(3, {st_mode=S_IFREG|0644, st_size=145720, ...}) = 0
mmap(NULL, 145720, PROT_READ, MAP_PRIVATE, 3, 0) = 0x7fa2e0dec000--------------------------------------------------------1,只读私有文件映射,在a处释放。
close(3) = 0
access("/etc/ld.so.nohwcap", F_OK) = -1 ENOENT (No such file or directory)
open("/lib/x86_64-linux-gnu/libc.so.6", O_RDONLY|O_CLOEXEC) = 3
read(3, "\177ELF\2\1\1\3\0\0\0\0\0\0\0\0\3\0>\0\1\0\0\0P\t\2\0\0\0\0\0"..., 832) = 832
fstat(3, {st_mode=S_IFREG|0755, st_size=1868984, ...}) = 0
mmap(NULL, 4096, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_ANONYMOUS, -1, 0) = 0x7fa2e0deb000--------------------------------2,匿名映射一页,范围0x7fa2e0deb000-0x7fa2e0dec000,可读写
mmap(NULL, 3971488, PROT_READ|PROT_EXEC, MAP_PRIVATE|MAP_DENYWRITE, 3, 0) = 0x7fa2e0821000-------------------------------3,创建可读可执行,私有文件映射,范围0x7fa2e0821000-0x7fa2e0beb000
mprotect(0x7fa2e09e1000, 2097152, PROT_NONE) = 0-------------------------------------------------------------------------4,修改0x7fa2e09e1000-0x7fa2e0be1000属性,不可读写执行
mmap(0x7fa2e0be1000, 24576, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_FIXED|MAP_DENYWRITE, 3, 0x1c0000) = 0x7fa2e0be1000-----5,私有文件固定地址映射,可读写,0x7fa2e0be1000-0x7fa2e0be7000
mmap(0x7fa2e0be7000, 14752, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_FIXED|MAP_ANONYMOUS, -1, 0) = 0x7fa2e0be7000-----------6,私有匿名固定地址映射,可读写,0x7fa2e0be7000-0x7fa2e0beb000
close(3) = 0
mmap(NULL, 4096, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_ANONYMOUS, -1, 0) = 0x7fa2e0dea000--------------------------------7,匿名映射一页,范围0x7fa2e0dea000-0x7fa2e0deb000,可读写
mmap(NULL, 4096, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_ANONYMOUS, -1, 0) = 0x7fa2e0de9000--------------------------------8,匿名映射一页,范围0x7fa2e0de9000-0x7fa2e0dea000,可读写
arch_prctl(ARCH_SET_FS, 0x7fa2e0dea700) = 0
mprotect(0x7fa2e0be1000, 16384, PROT_READ) = 0---------------------------------------------------------------------------9,将5创建的内存映射的0x7fa2e0be1000-0x7fa2e0be5000变成只读
mprotect(0x600000, 4096, PROT_READ) = 0
mprotect(0x7fa2e0e10000, 4096, PROT_READ) = 0
munmap(0x7fa2e0dec000, 145720) = 0------------------------------------------------------------------------------a,释放1创建的内存映射
nanosleep({1000, 0}, 0x7ffef87e2c10) = 0------------------------------------------------------------------------------此时cat /proc/xxx/maps,1创建的内存映射已经被释放。
exit_group(0) = ?
+++ exited with 0 +++
下面逐一分析mmap()/munmap()对进程映射空间的影响。
00400000-00401000 r-xp 00000000 08:08 3415949 /home/al/mmap/sleep
00600000-00601000 r--p 00000000 08:08 3415949 /home/al/mmap/sleep
00601000-00602000 rw-p 00001000 08:08 3415949 /home/al/mmap/sleep
7fa2e0821000-7fa2e09e1000 r-xp 00000000 08:08 3185985 /lib/x86_64-linux-gnu/libc-2.23.so--------------3创建私有文件映射,可读可执行。
7fa2e09e1000-7fa2e0be1000 ---p 001c0000 08:08 3185985 /lib/x86_64-linux-gnu/libc-2.23.so--------------3创建私有文件映射,4修改属性从可读可执行变成不可读写不可执行。
7fa2e0be1000-7fa2e0be5000 r--p 001c0000 08:08 3185985 /lib/x86_64-linux-gnu/libc-2.23.so--------------3创建私有文件映射,5修改属性从可读可执行变成可读写,9修改属性为只读。
7fa2e0be5000-7fa2e0be7000 rw-p 001c4000 08:08 3185985 /lib/x86_64-linux-gnu/libc-2.23.so--------------3创建私有文件映射,5修改属性从可读可执行变成可读写。
7fa2e0be7000-7fa2e0beb000 rw-p 00000000 00:00 0 -------------------------------------------------------------------------3创建私有文件映射,6覆盖创建的私有匿名固定地址映射,可读写。
7fa2e0beb000-7fa2e0c11000 r-xp 00000000 08:08 3185983 /lib/x86_64-linux-gnu/ld-2.23.so
7fa2e0de9000-7fa2e0dec000 rw-p 00000000 00:00 0 -------------------------------------------------------------------------2,7,8三个匿名映射因为属性都是私有匿名映射,可读写,所以vma区域合并。
7fa2e0e10000-7fa2e0e11000 r--p 00025000 08:08 3185983 /lib/x86_64-linux-gnu/ld-2.23.so
7fa2e0e11000-7fa2e0e12000 rw-p 00026000 08:08 3185983 /lib/x86_64-linux-gnu/ld-2.23.so
7fa2e0e12000-7fa2e0e13000 rw-p 00000000 00:00 0
7ffef87c3000-7ffef87e4000 rw-p 00000000 00:00 0 [stack]
7ffef87e4000-7ffef87e7000 r--p 00000000 00:00 0 [vvar]
7ffef87e7000-7ffef87e9000 r-xp 00000000 00:00 0 [vdso]
ffffffffff600000-ffffffffff601000 r-xp 00000000 00:00 0 [vsyscall]
对于解释可以参考UNIX系统编程手册如下描述。
4. 参考文档
《linux内存映射mmap原理分析》


 浙公网安备 33010602011771号
浙公网安备 33010602011771号