
《安富莱嵌入式周报》第290期:开源静电便携测试仪,开源音频功放,CAN高波特率设计,超级铁电产品,小米Vela系统,65W USB PD充电器参考设计
往期周报汇总地址:http://www.armbbs.cn/forum.php?mod=forumdisplay&fid=12&filter=typeid&typeid=104

上周更新了一期视频教程:
USB应用实战视频教程第4期:手把手玩转基于QT6.4的USB BULK上位机和下位机开发下篇(2022-11-07)
https://www.armbbs.cn/forum.php?mod=viewthread&tid=116396
视频版:
https://www.bilibili.com/video/BV1CK411m7F7
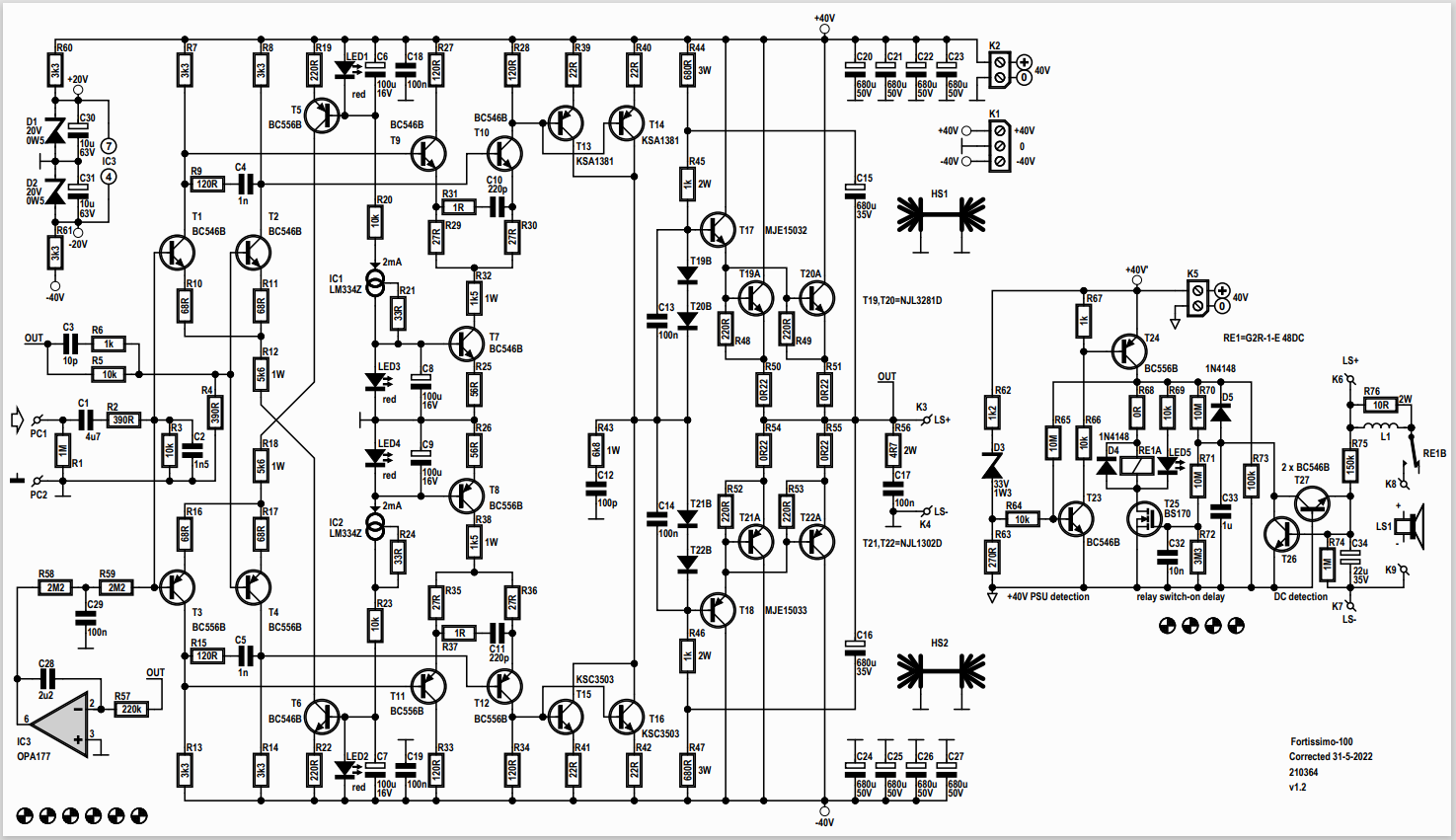
1、开源音频功放
https://www.elektormagazine.com/labs/fortissimo-100
帖子里面有详细的分析说明和测试参数报告
电源具有稳定的对称+/- 40 V,以确保最佳性能。
最大功率 (THD 1%) 在 8 Ω负载下接近 100 W,在 4 Ω负载下接近 190 W(参见测量)。所有部件均为通孔,便于构建放大器。设计是完全对称的。
原理图:
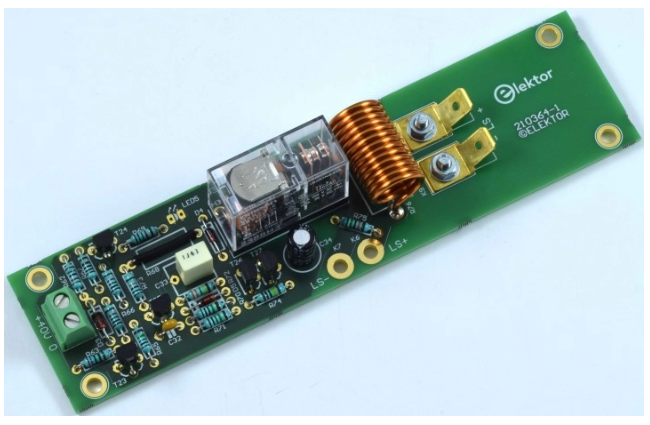
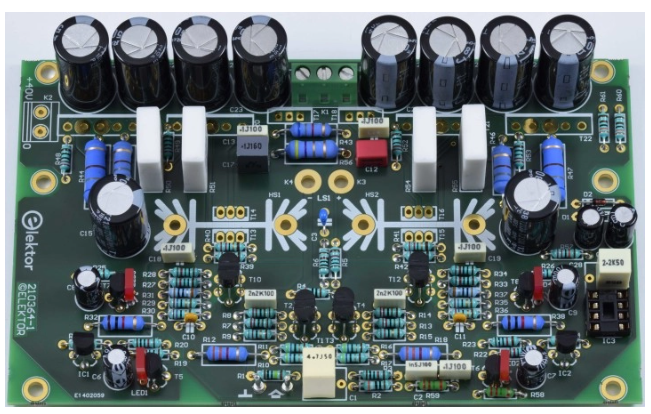
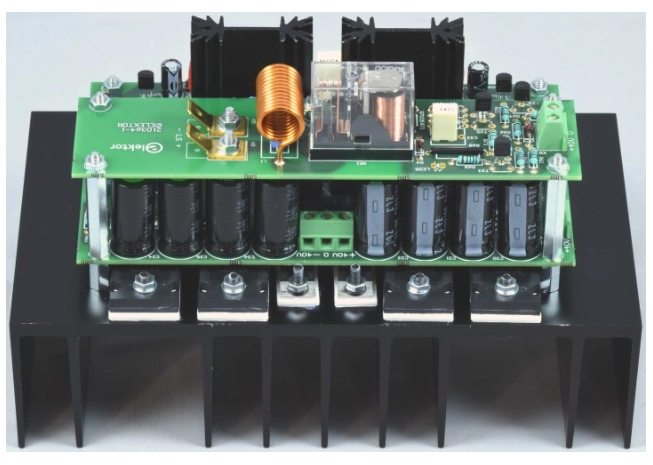
效果:


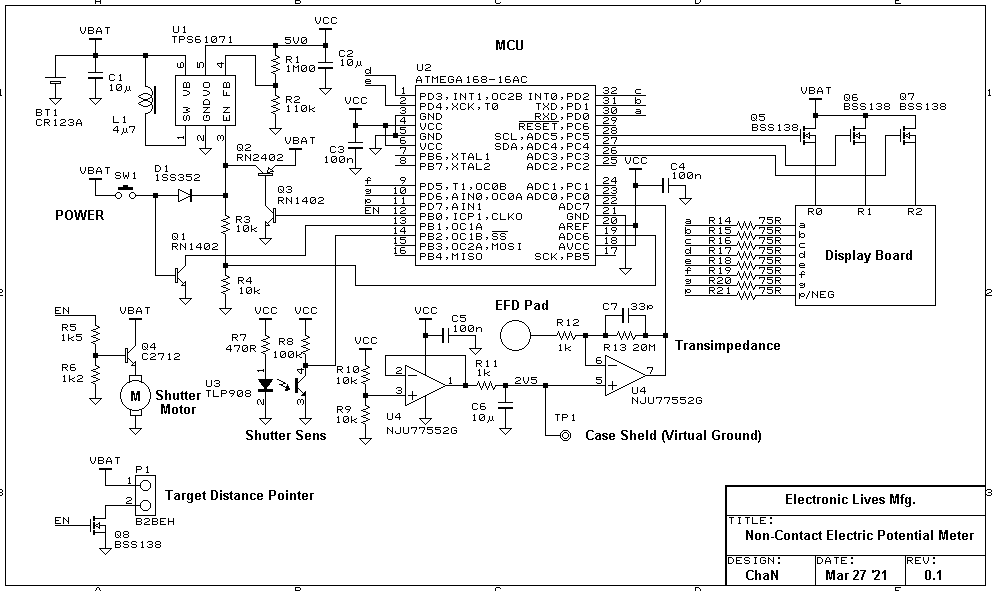
2、FatFS作者ChaN老师分享开源表面电位计产品
http://elm-chan.org/works/ncepm/report.html
在旱季,我们经常受到金属物体的电击,尤其是门把手。这是由于人体中带有静电。任何物体都可以带电,通常,物体的电势达到几千伏或更高。静电经常导致电子设备故障或损坏。
一直想知道物体或人体中带了多少静电,所以建立了一个表面电位计来测量带电物体的电势。

3、小米基于NuttX全家桶设计的物联网系统Vela
https://iot.mi.com/vela/detail.html
NuttX的玩法和Zephyr差不多,后面我们H7-TOOL的RTOS Trace功能支持NuttX时深究下。


4、国产江波龙发布中国大陆首款车规级UFS
http://cn.longsys.com/about/news/2201.html
当前推出的车规级UFS 2.1版本能够满足客户从eMMC向UFS 存储迭代的基本需求,FORESEE车规级UFS 3.1的128GB与256GB产品也将会陆续推出。


5、TI继续加强直营,推出API接口实时获取产品库存和价格变更,并且无需登陆官网就可以直接下单
https://www.ti.com.cn/zh-cn/ordering-resources/api-buying.html
这种方式确实是方便太多了。
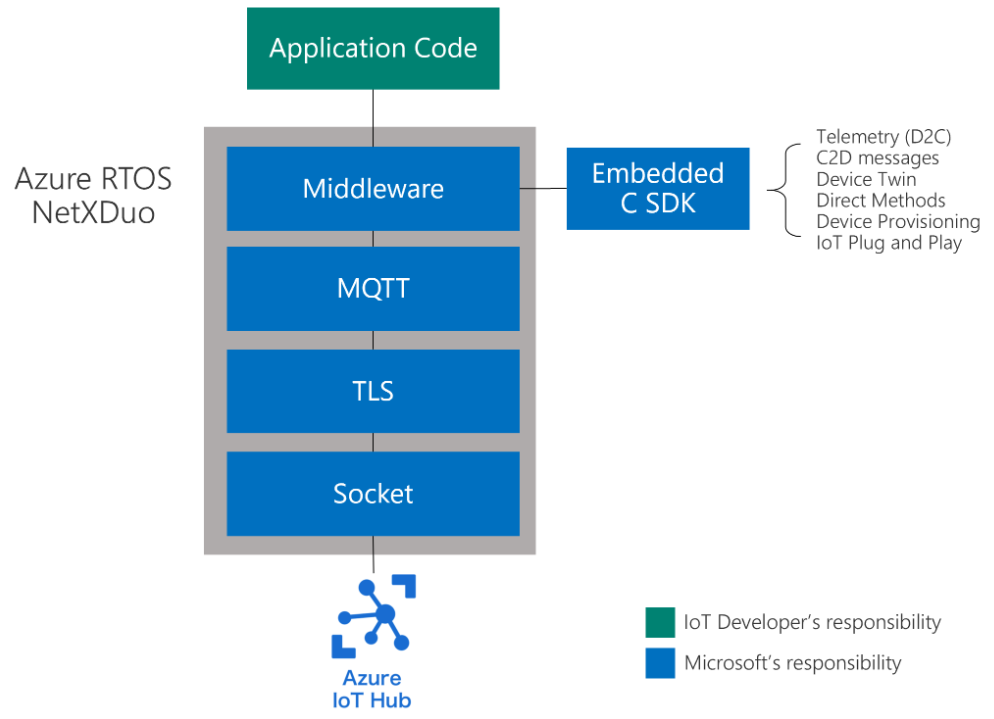
6、ThreadX基于NetXDUO推出的OTA无线固件更新和安全管理功能
https://github.com/azure-rtos/netxduo
https://github.com/azure-rtos/netxduo/tree/master/addons/azure_iot
https://learn.microsoft.com/zh-cn/azure/iot-hub-device-update/device-update-azure-real-time-operating-system
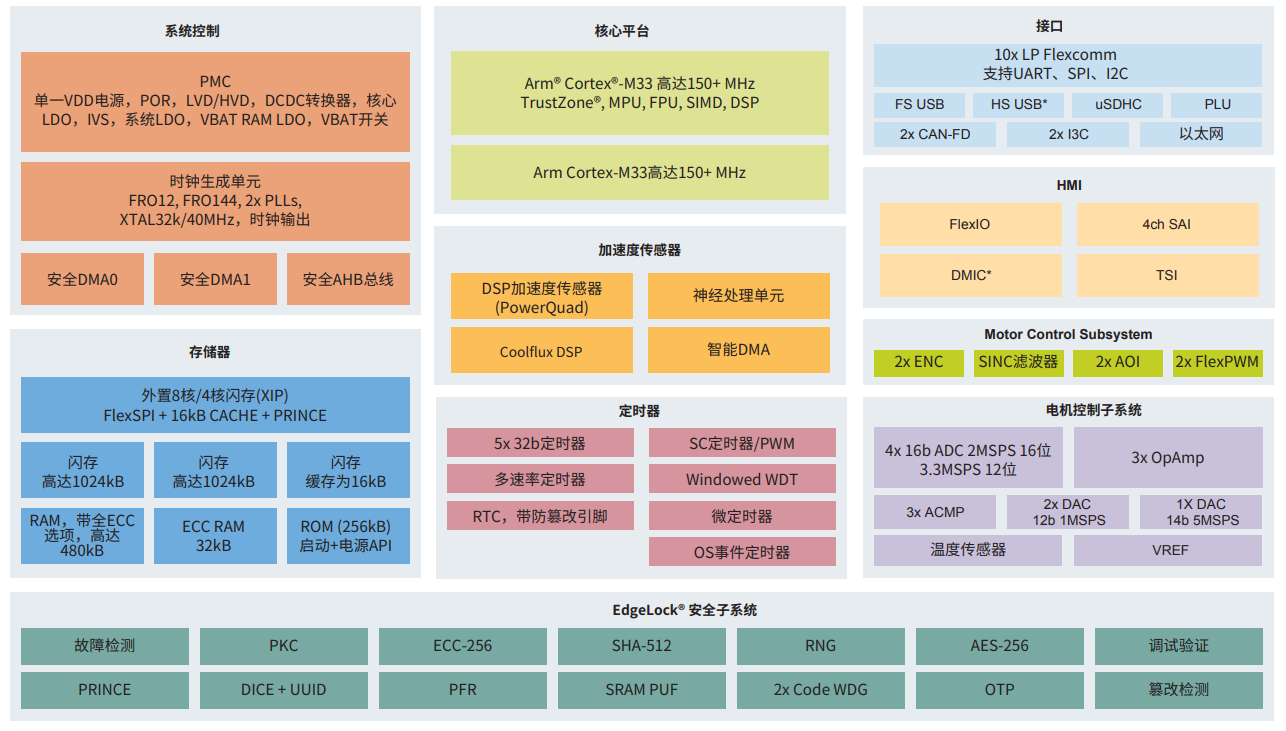
7、NXP的两款MCX N系列AI单片机发布
总体来看,还是挺有特色的,双核M33,两个16bit ADC,1个14bit DAC,2个12bit DAC,USB带片上高速PHY。
NPU神经网络,智能DMA,DSP协处理器(非M内核自带的DSP单元)
与单独的CPU内核相比,集成的神经处理单元可实现高达30倍的机器学习(ML)运算加速,减少唤醒时间并降低总功耗
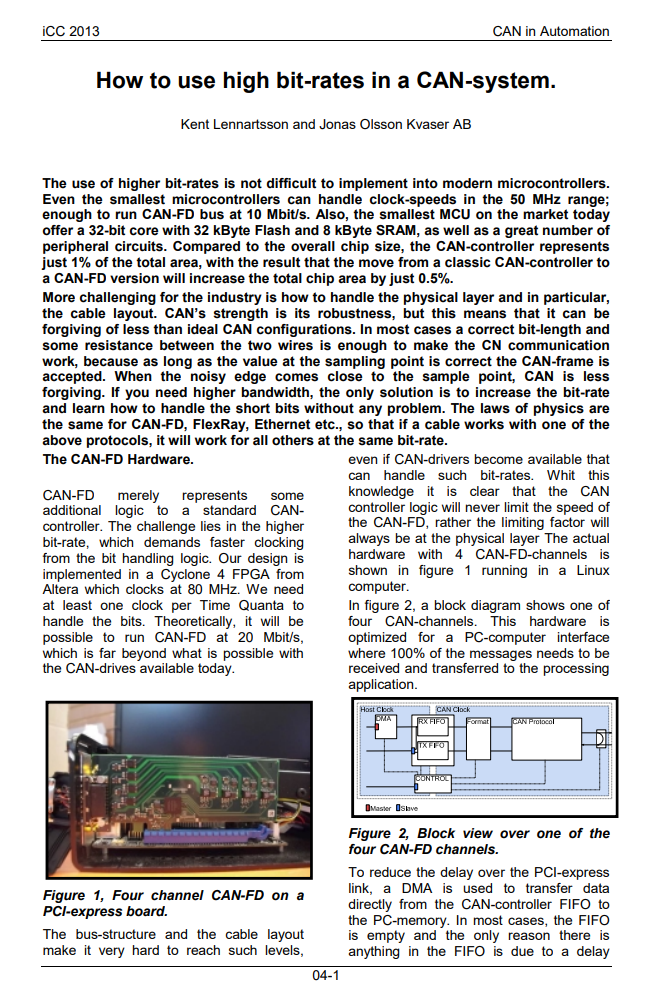
8、CAN系统中高波特率设计应用笔记
https://www.kvaser.com/wp-content/uploads/2013/12/canefpaper.pdf
非常好的一篇文件,给大家分享下
9、简单易用的树莓派单片机VSCode插件
https://marketplace.visualstudio.com/items?itemName=paulober.pico-w-go
从效果来看,使用比较方便
10、用于Windows端LUA编程的LuaRT升级至V1.1.0
https://github.com/samyeyo/LuaRT
有自己的IDE,实际效果还不错
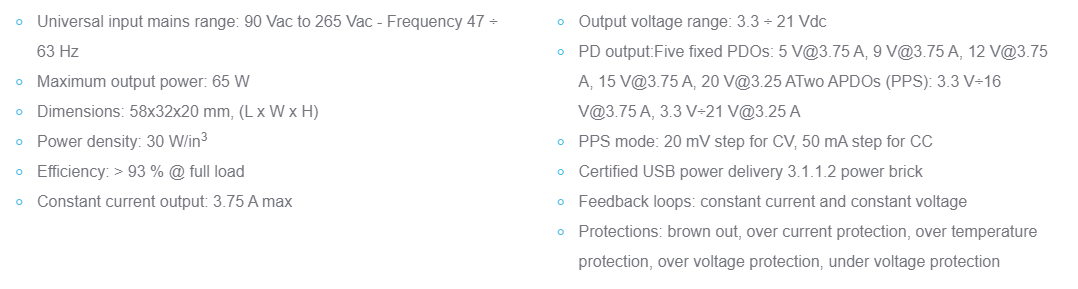
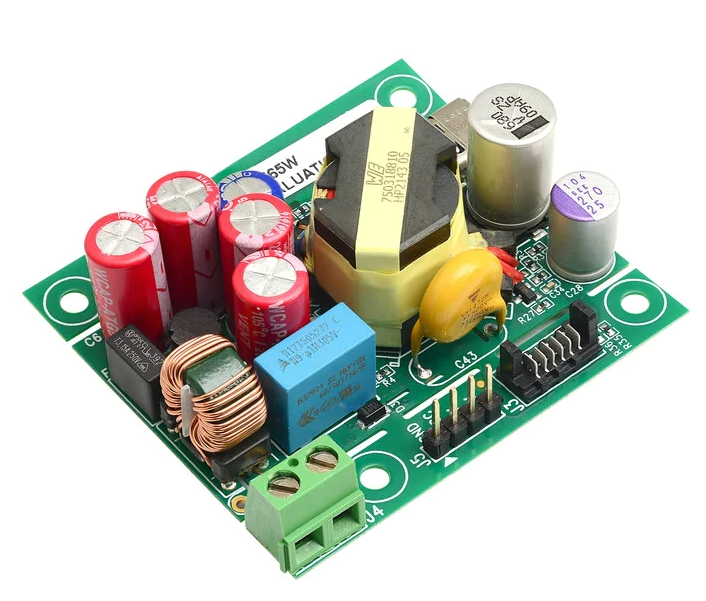
11、ST推出一款可编程的65W USB Type-C PD的充电器参考设计
https://www.st.com/en/evaluation-tools/evlone65w.html
这个板子是基于ST-ONE主控芯片,采用的M0+内核
规格:
效果:
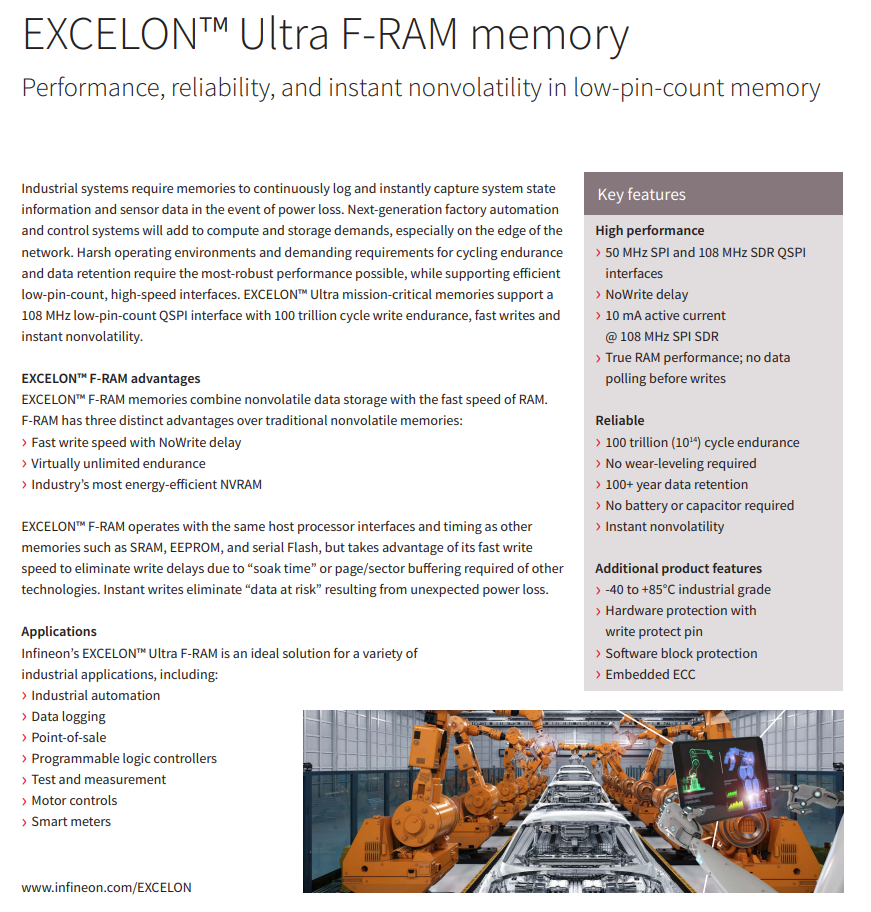
12、英飞凌推出超级铁电产品,108M SDR QSPI,10^14擦写次数,100+年数据存储
性能还是很强的,支持50MHz标准SPI或者108M SDR QSPI,写入无延迟,真RAM(写入无需查询),无需擦写均衡,容量范围从2Mb到16Mb,
https://www.infineon.com/cms/en/product/memories/f-ram-ferroelectric-ram/excelon-f-ram/
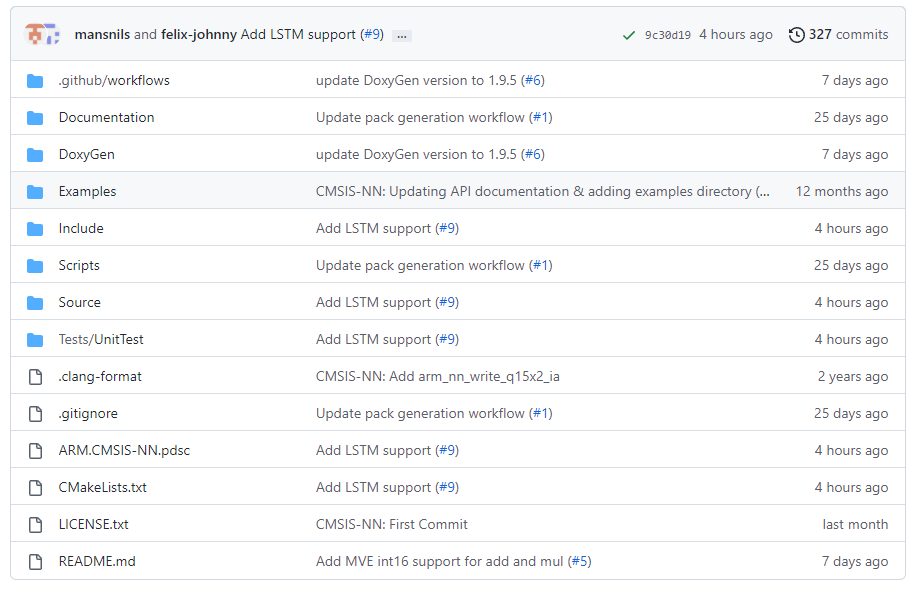
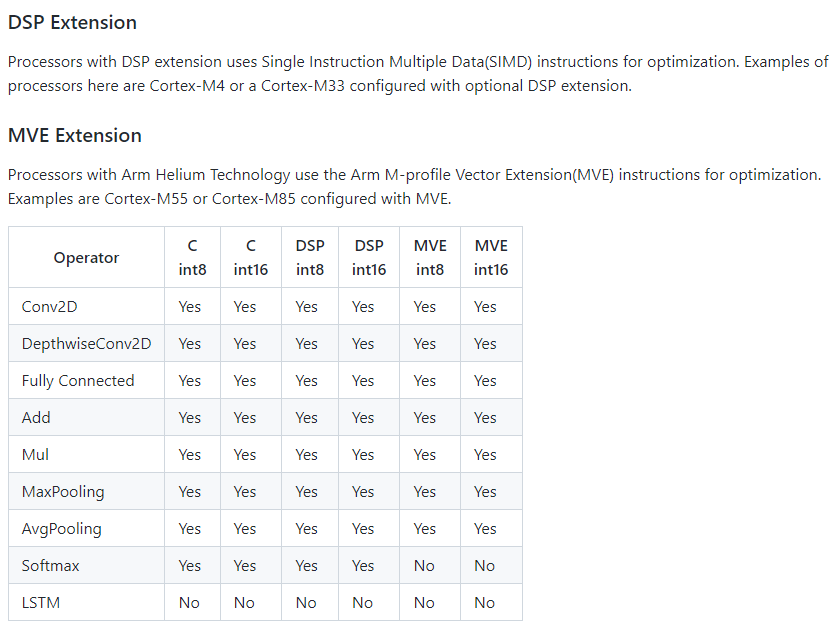
13、继CMSIS-DSP独立出来后,CMSIS-NN也开始独立更新了
之前都是在CMSIS综合包里面,现在也开始独立更新版本了:
https://github.com/ARM-software/CMSIS-NN
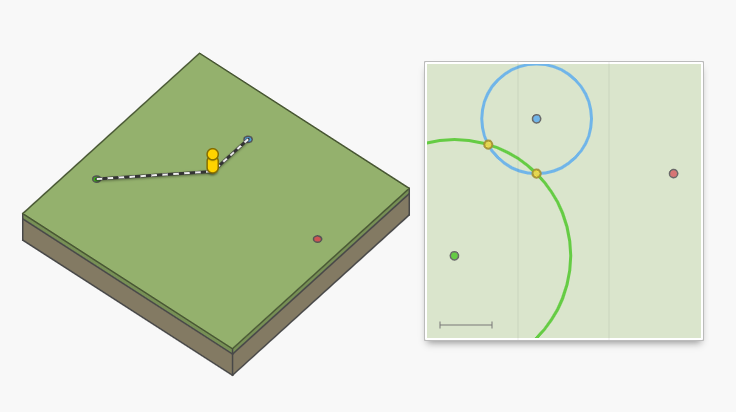
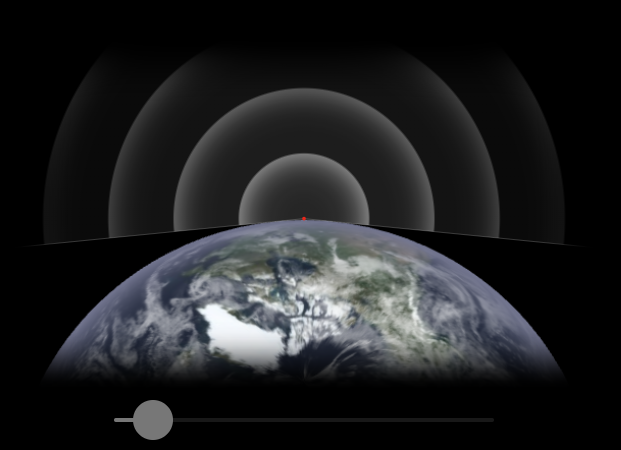
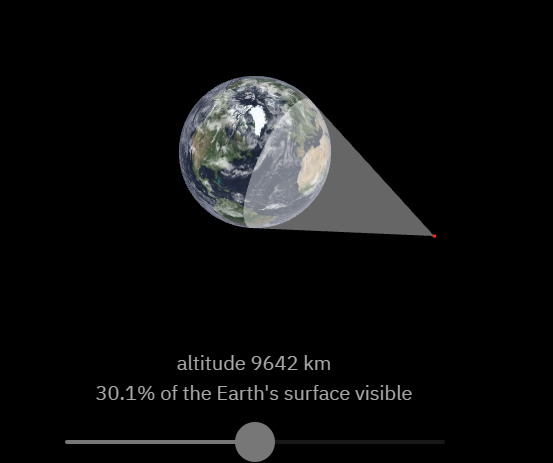
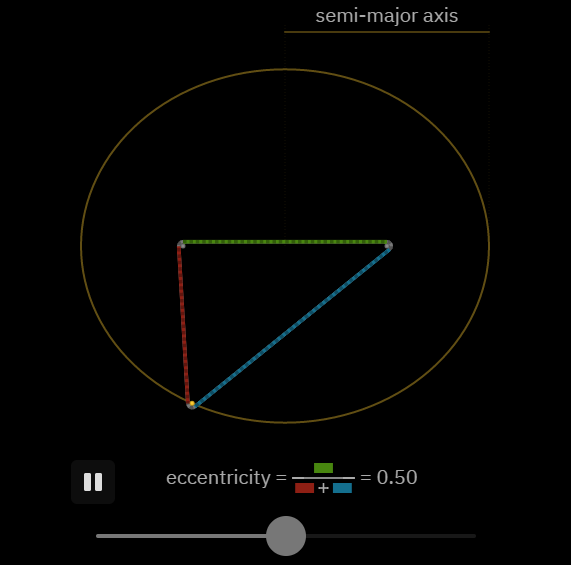
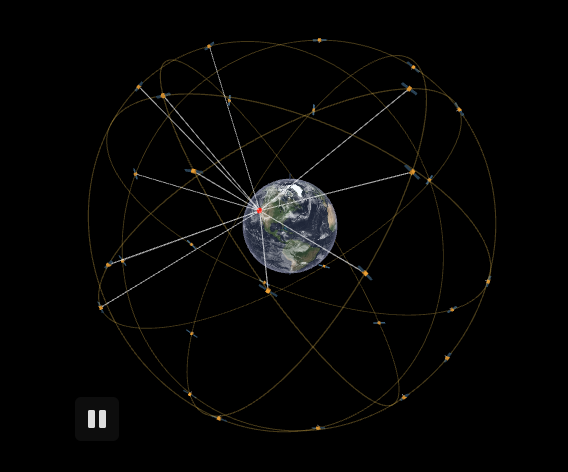
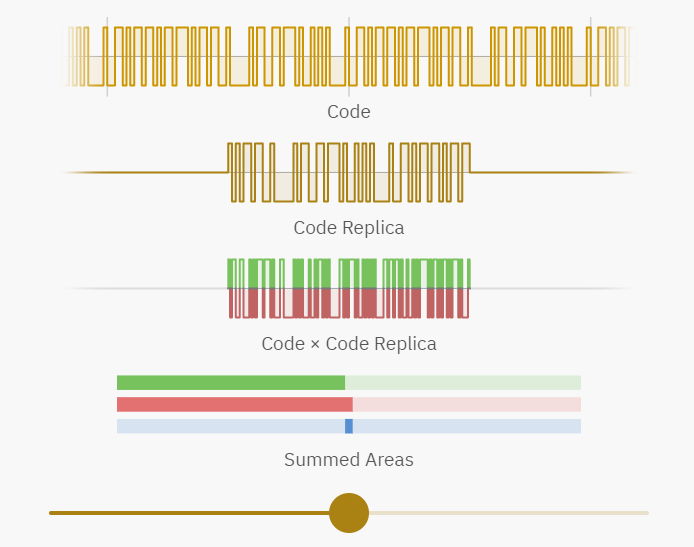
14、一篇非常棒的GPS基础理论知识普及贴,图文并茂
15、Modbus主从机数据量较大时,解析可以做成map映射表的形式,方便修改
之前分享的视频和文档:
BSP视频教程第23期:通过Modbus解析器,轻松掌握Modbus主从协议栈(2022-09-16)
https://www.armbbs.cn/forum.php?mod=viewthread&tid=115474
BSP视频教程第24期:应用实战,设计一款属于自己的Modbus RTU主从协议栈(2022-10-03)
https://www.armbbs.cn/forum.php?mod=viewthread&tid=115788
Modbus收发数据少的话,直接已经发布的例子方案即可,如果上百上千个寄存器处理,可以考虑map映射表的形式。
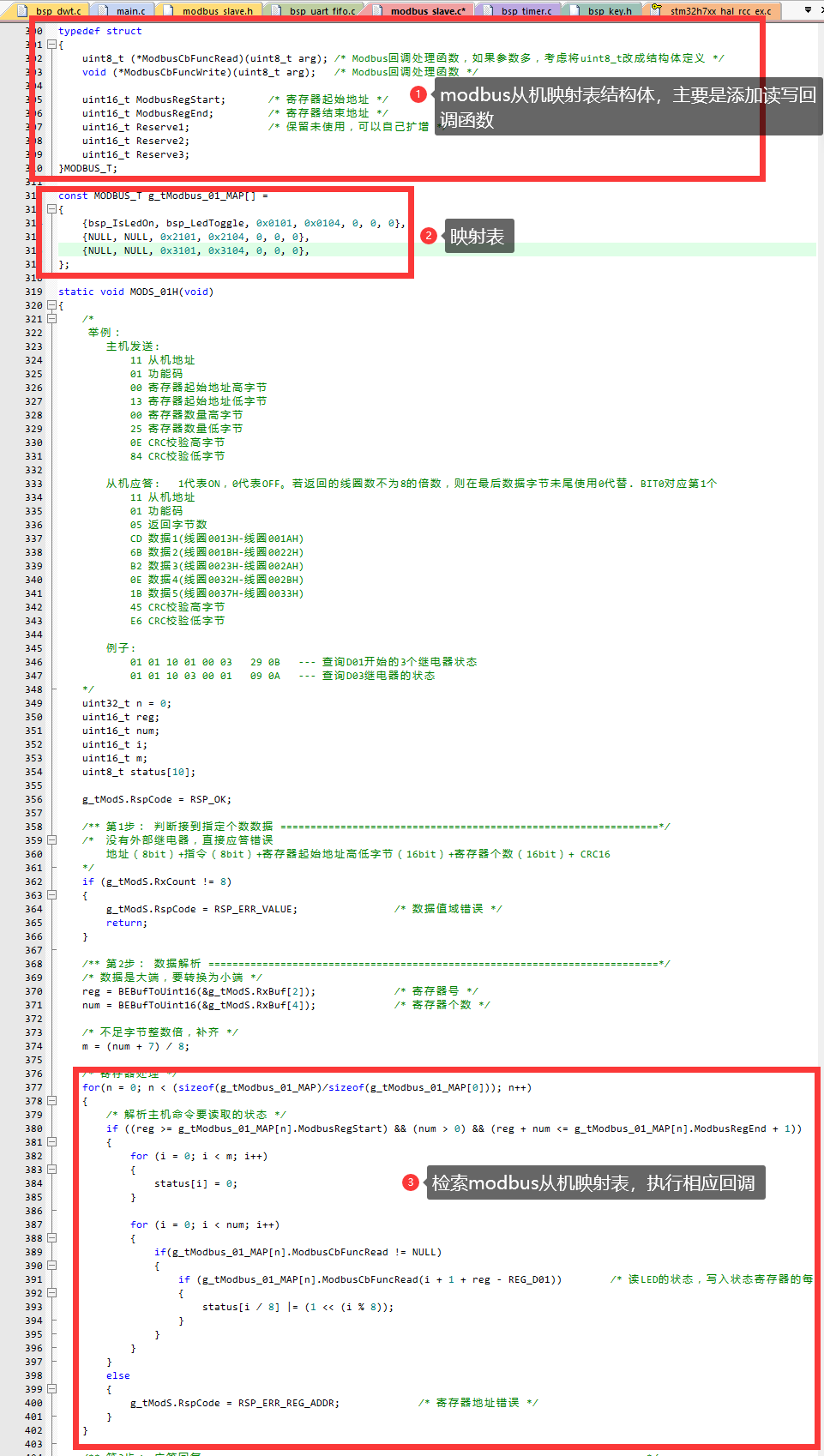
代码查看:
/* ********************************************************************************************************* * 函 数 名: MODS_01H * 功能说明: 读取线圈状态(对应远程开关D01/D02/D03) * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ /* 说明:这里用LED代替继电器,便于观察现象 */ typedef struct { uint8_t (*ModbusCbFuncRead)(uint8_t arg); /* Modbus回调处理函数,如果参数多,考虑将uint8_t改成结构体定义 */ void (*ModbusCbFuncWrite)(uint8_t arg); /* Modbus回调处理函数 */ uint16_t ModbusRegStart; /* 寄存器起始地址 */ uint16_t ModbusRegEnd; /* 寄存器结束地址 */ uint16_t Reserve1; /* 保留未使用,可以自己扩增 */ uint16_t Reserve2; uint16_t Reserve3; }MODBUS_T; const MODBUS_T g_tModbus_01_MAP[] = { {bsp_IsLedOn, bsp_LedToggle, 0x0101, 0x0104, 0, 0, 0}, {NULL, NULL, 0x2101, 0x2104, 0, 0, 0}, {NULL, NULL, 0x3101, 0x3104, 0, 0, 0}, }; static void MODS_01H(void) { /* 举例: 主机发送: 11 从机地址 01 功能码 00 寄存器起始地址高字节 13 寄存器起始地址低字节 00 寄存器数量高字节 25 寄存器数量低字节 0E CRC校验高字节 84 CRC校验低字节 从机应答: 1代表ON,0代表OFF。若返回的线圈数不为8的倍数,则在最后数据字节未尾使用0代替. BIT0对应第1个 11 从机地址 01 功能码 05 返回字节数 CD 数据1(线圈0013H-线圈001AH) 6B 数据2(线圈001BH-线圈0022H) B2 数据3(线圈0023H-线圈002AH) 0E 数据4(线圈0032H-线圈002BH) 1B 数据5(线圈0037H-线圈0033H) 45 CRC校验高字节 E6 CRC校验低字节 例子: 01 01 10 01 00 03 29 0B --- 查询D01开始的3个继电器状态 01 01 10 03 00 01 09 0A --- 查询D03继电器的状态 */ uint32_t n = 0; uint16_t reg; uint16_t num; uint16_t i; uint16_t m; uint8_t status[10]; g_tModS.RspCode = RSP_OK; /** 第1步: 判断接到指定个数数据 ===============================================================*/ /* 没有外部继电器,直接应答错误 地址(8bit)+指令(8bit)+寄存器起始地址高低字节(16bit)+寄存器个数(16bit)+ CRC16 */ if (g_tModS.RxCount != 8) { g_tModS.RspCode = RSP_ERR_VALUE; /* 数据值域错误 */ return; } /** 第2步: 数据解析 ===========================================================================*/ /* 数据是大端,要转换为小端 */ reg = BEBufToUint16(&g_tModS.RxBuf[2]); /* 寄存器号 */ num = BEBufToUint16(&g_tModS.RxBuf[4]); /* 寄存器个数 */ /* 不足字节整数倍,补齐 */ m = (num + 7) / 8; /* 寄存器处理 */ for(n = 0; n < (sizeof(g_tModbus_01_MAP)/sizeof(g_tModbus_01_MAP[0])); n++) { /* 解析主机命令要读取的状态 */ if ((reg >= g_tModbus_01_MAP[n].ModbusRegStart) && (num > 0) && (reg + num <= g_tModbus_01_MAP[n].ModbusRegEnd + 1)) { for (i = 0; i < m; i++) { status = 0; } for (i = 0; i < num; i++) { if(g_tModbus_01_MAP[n].ModbusCbFuncRead != NULL) { if (g_tModbus_01_MAP[n].ModbusCbFuncRead(i + 1 + reg - REG_D01)) /* 读LED的状态,写入状态寄存器的每一位 */ { status[i / 8] |= (1 << (i % 8)); } } } } else { g_tModS.RspCode = RSP_ERR_REG_ADDR; /* 寄存器地址错误 */ } } /** 第3步: 应答回复 =========================================================================*/ if (g_tModS.RspCode == RSP_OK) /* 正确应答 */ { g_tModS.TxCount = 0; g_tModS.TxBuf[g_tModS.TxCount++] = g_tModS.RxBuf[0]; /* 返回从机地址 */ g_tModS.TxBuf[g_tModS.TxCount++] = g_tModS.RxBuf[1]; /* 返回从机指令 */ g_tModS.TxBuf[g_tModS.TxCount++] = m; /* 返回字节数 */ for (i = 0; i < m; i++) { g_tModS.TxBuf[g_tModS.TxCount++] = status; /* 返回继电器状态 */ } MODS_SendWithCRC(g_tModS.TxBuf, g_tModS.TxCount); } else { MODS_SendAckErr(g_tModS.RspCode); /* 告诉主机命令错误 */ } }
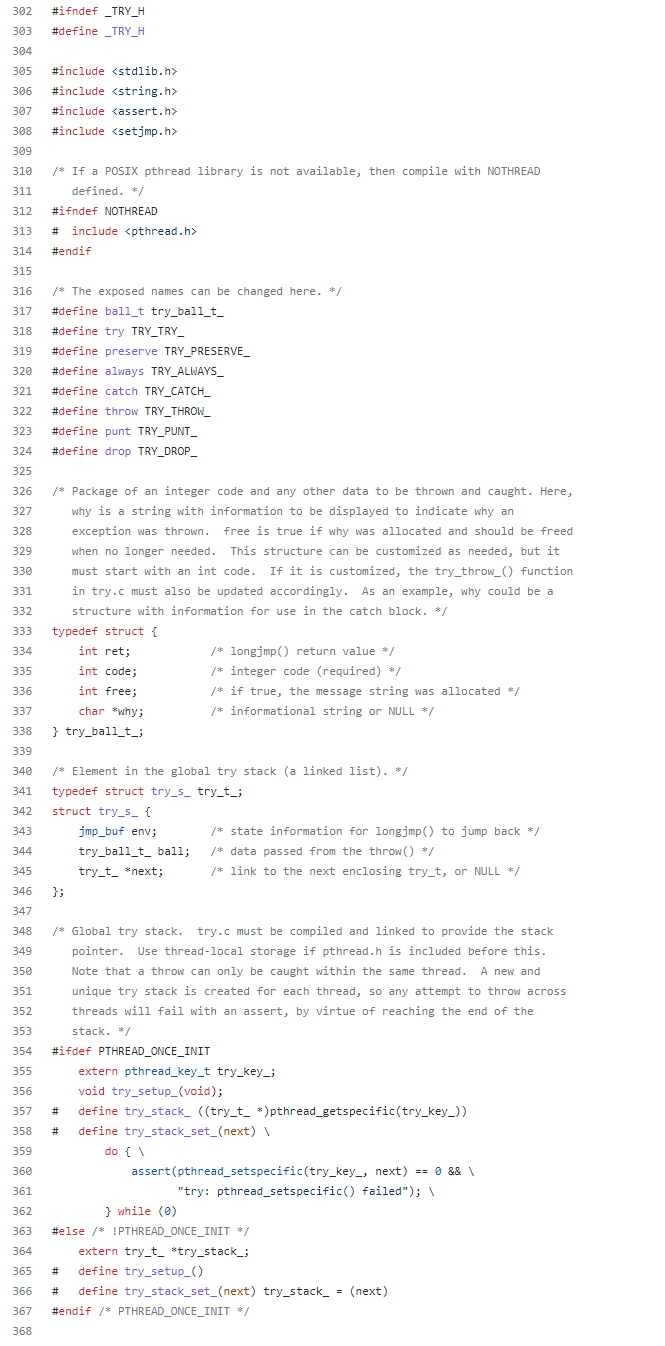
16、C语言方式实现的try catch异常捕获实现
https://github.com/madler/pigz/blob/master/try.h
try catch的作用是当程序发生错误时,能够保证程序继续执行下去,在C++上有专门的try catch供调用。
部分截图:
17、H7-TOOL本周进展
H7-TOOL详细介绍:
https://www.armbbs.cn/forum.php?mod=viewthread&tid=89934
(1)增加新的脱机烧录芯片支持中。
(2)H7-TOOL的Trace功能开始支持FreeRTOS的支持中,初步已经可以检索到任务。
FreeRTOS也是好几个链表要检索,跟RTX5有一拼,就绪有个链表,挂起有个链表,延迟有个链表等,需要逐个检索才能把所有的任务都搜索出来。
pxReadyTasksLists
xDelayedTaskList1
xDelayedTaskList2
xPendingReadyList
xTasksWaitingTermination
xSuspendedTaskList
初步效果如下,已经可以检索到任务了
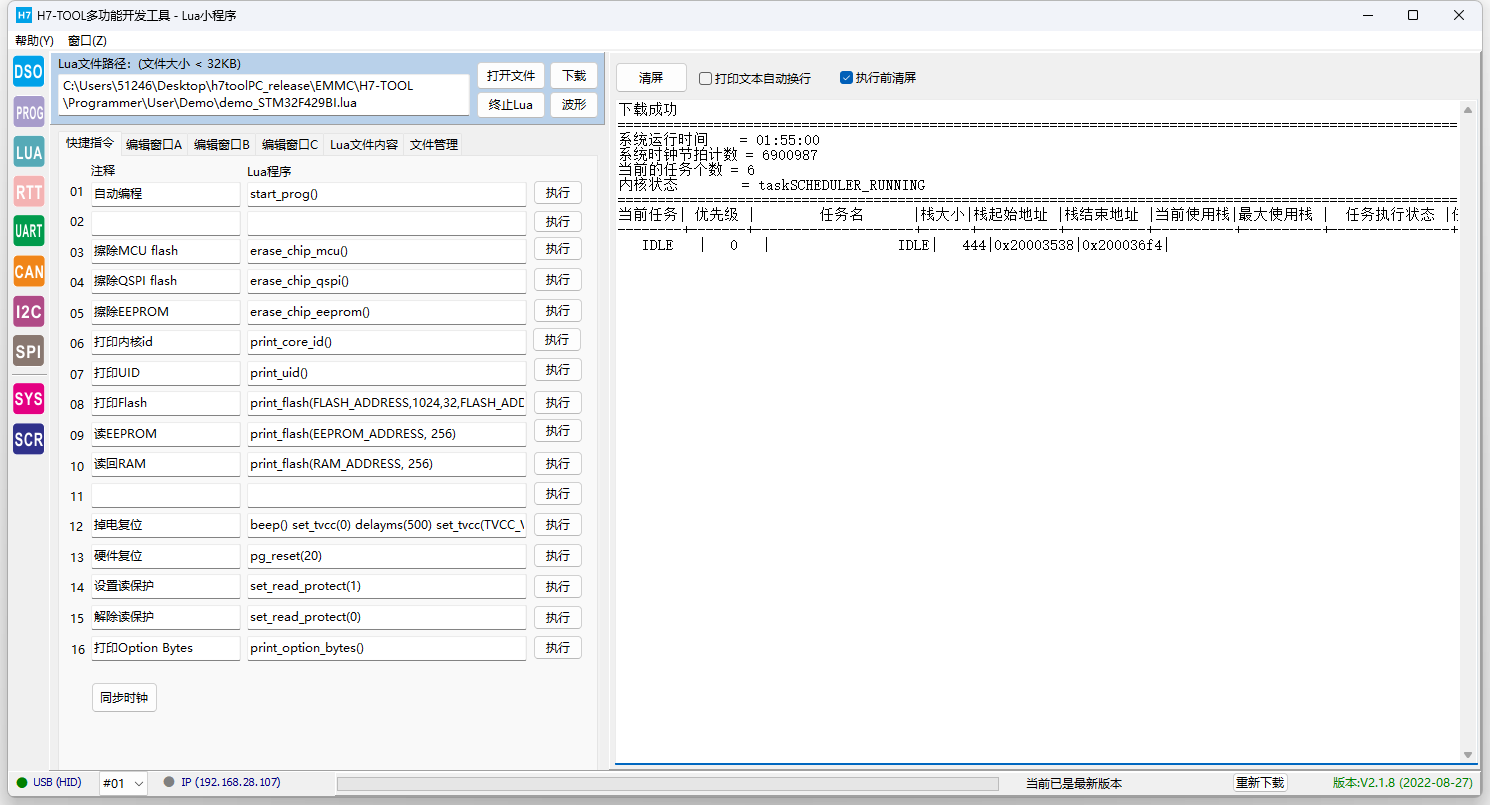
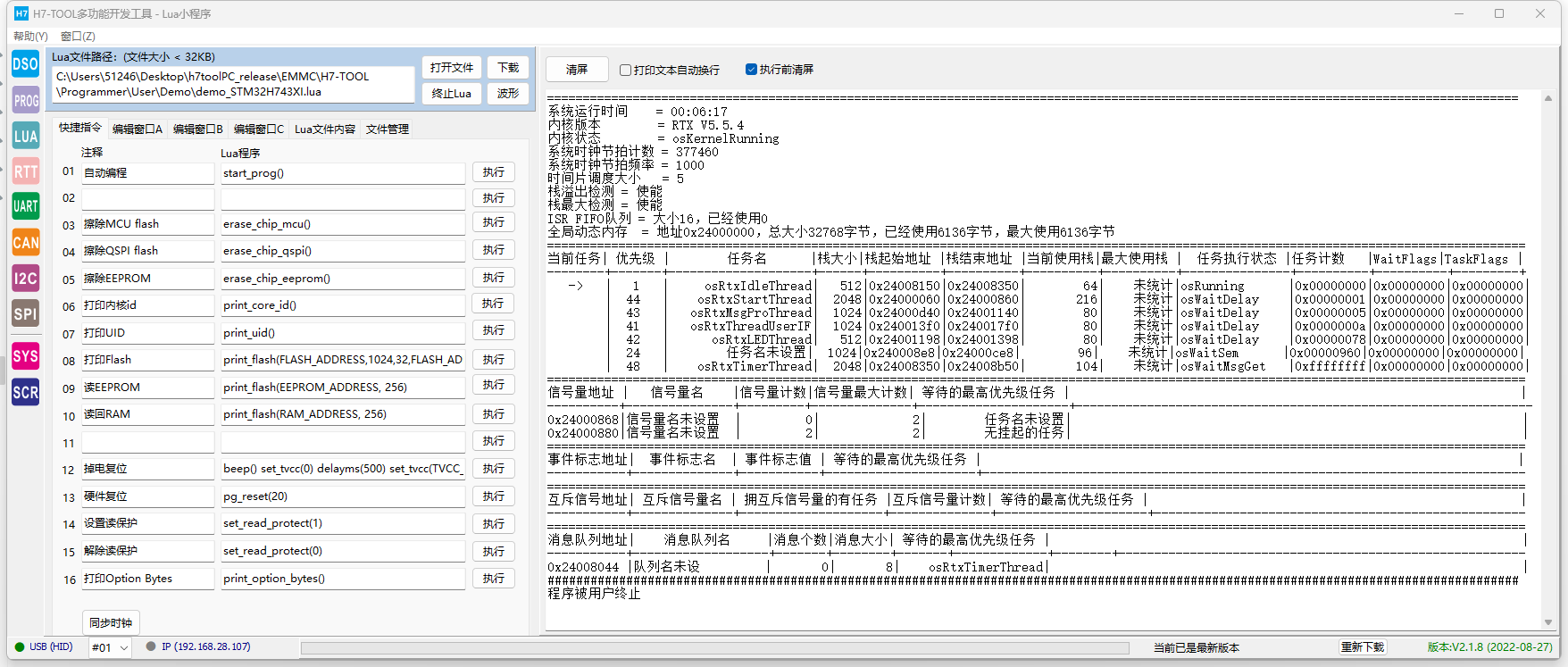
下面是之前做RTX5 Trace
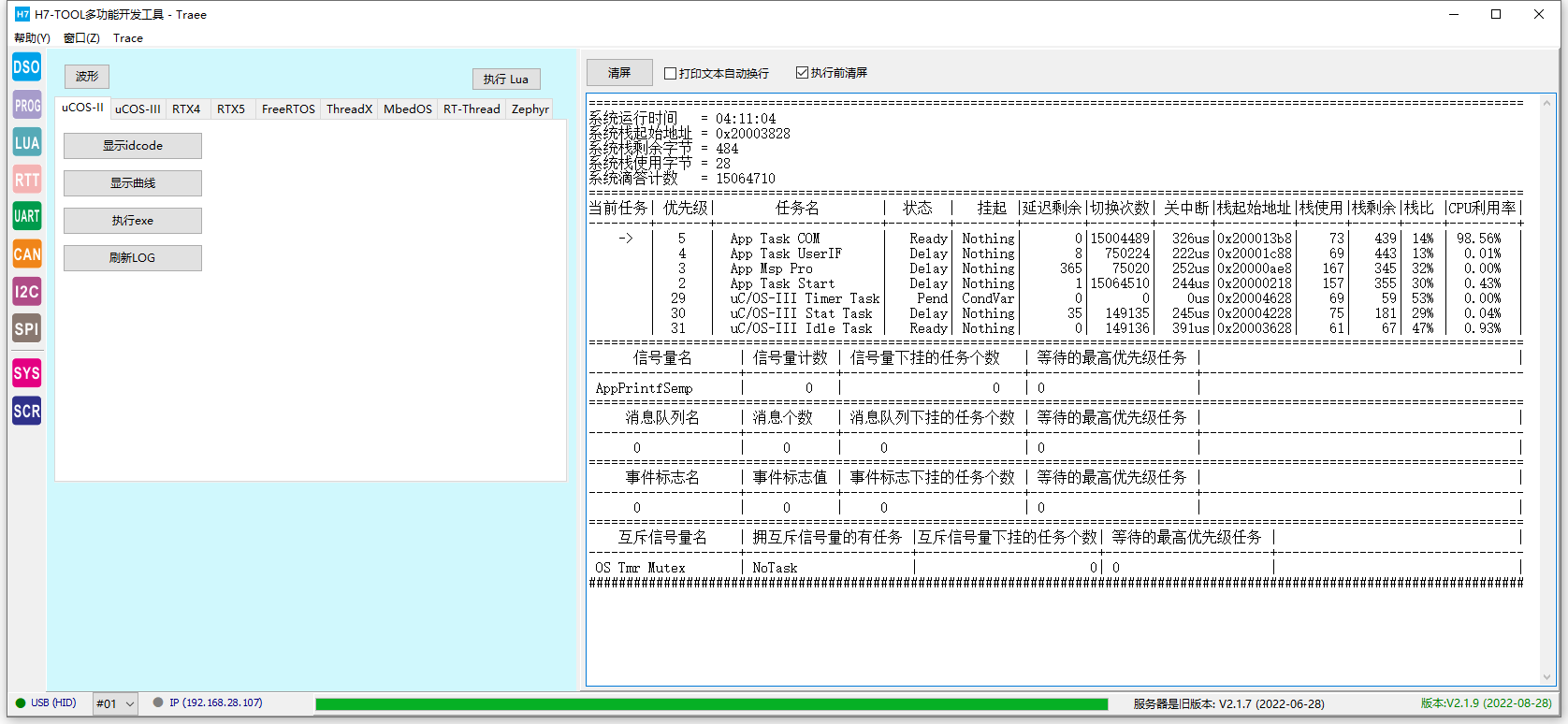
uCOS-III Trace
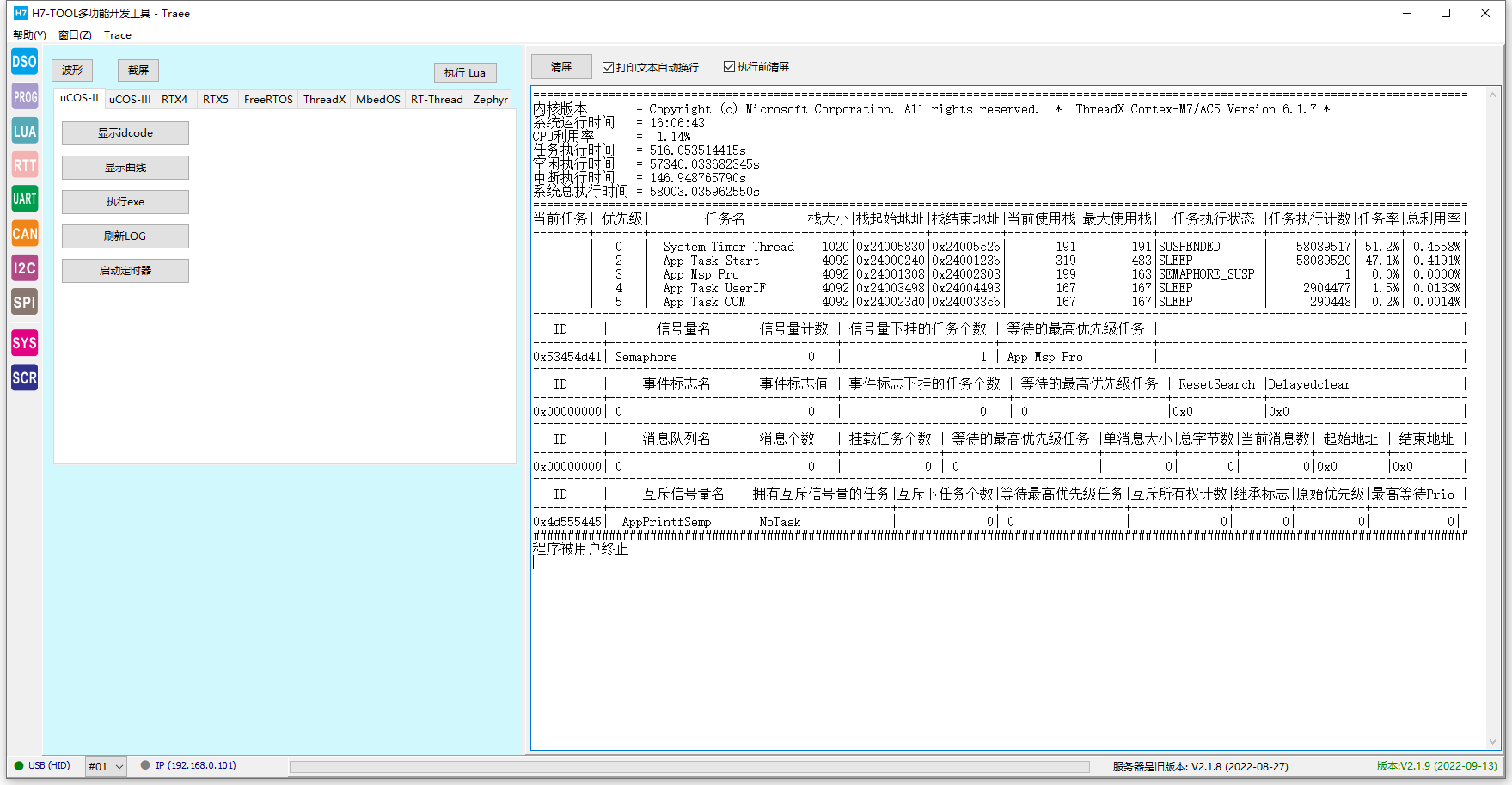
ThreadX Trace

 浙公网安备 33010602011771号
浙公网安备 33010602011771号