H7-TOOL的CANFD/CAN接口脱机烧写操作说明, 已经更新(2022-07-12)
通过Lua小程序,我们可以方便方便的在线方式做CANFD固件烧录,也可以离线方式运行Lua小程序做烧录。
本次是说明是采用H7-TOOL的CANFD方式连接我们V7板子做的操作说明。
【协议说明】
1、发送固件大小:符号‘*’ 来同步,然后发送固件大小,板子收到后,回复0x30表示擦除相应扇区大小成功,回复0x60表示擦除失败(由于TOOL的当前版本固件没有注册CANFD接收功能,所以简单做个延迟等待)。
2、发送固件数据:符号‘$’ 来同步,然后发送固件数据,每次224字节大小,板子收到后,回复0x30表示数据编程成功,回复0x60表示擦除失败。如此反复,一直到发送完毕(由于TOOL的当前版本固件没有注册CANFD接收功能,所以简单做个延迟等待)。
3、发送结束命令:符号‘#’ 表示传输结束,目标板可以加载到APP运行了。
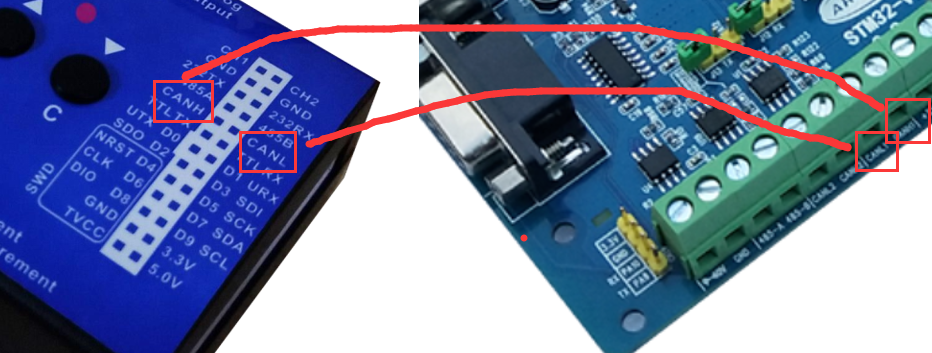
【硬件接线】
H7-TOOL通过CAN接到V7板子的CANFD1接口上,注意CANH接CANH,CANL接CANL
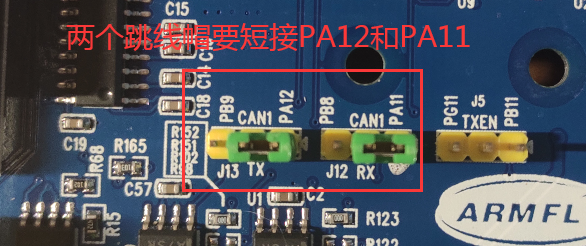
V7板子使用CANFD1,注意跳线帽:
【准备工作】
当前上位机还没有做专门的CANFD接口脱机烧录一键下载界面,需要手动将Lua文件和app固件存到TOOL的eMMC
1、H7-TOOL进入虚拟U盘
上电首界面长按S键 -> 系统设置 -> USB eMMC磁盘, 进入eMMC模拟U盘后,在如下路径新建文件夹串口脱机烧录

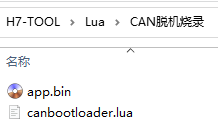
将如下两个文件存到新建的文件夹下
app.bin (50.03 KB)
canbootloader.lua (4.12 KB)
2、将目标板程序下载到V7开发板
基于V7的CANFD接口脱机烧录目标板程序.7z (2 MB)
【在线方式操作说明】
H7-TOOL可以采用USB,以太网或者WiFi方式连接上位机。
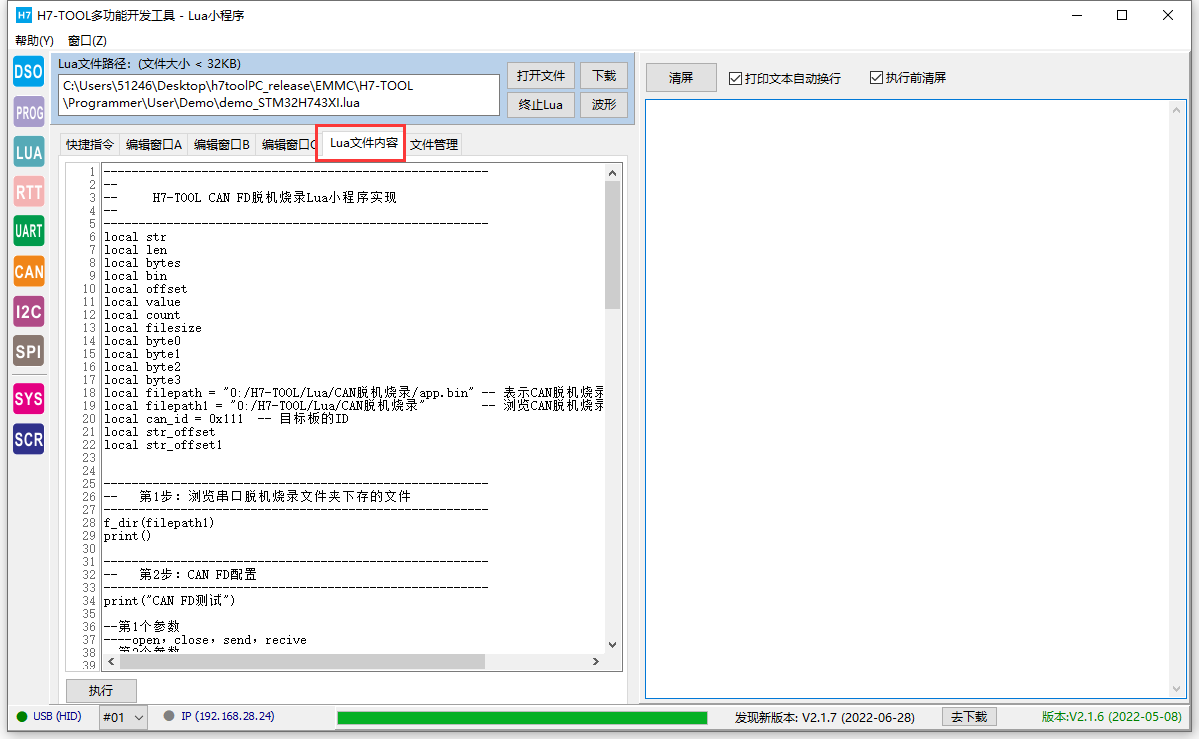
将前面lua小程序canbootloader.lua的内容复制到如下窗口:
点击下面的执行按钮就可以看到动图更新了:

【离线方式操作说明】
操作TOOL显示屏,进入Lua小程序界面:
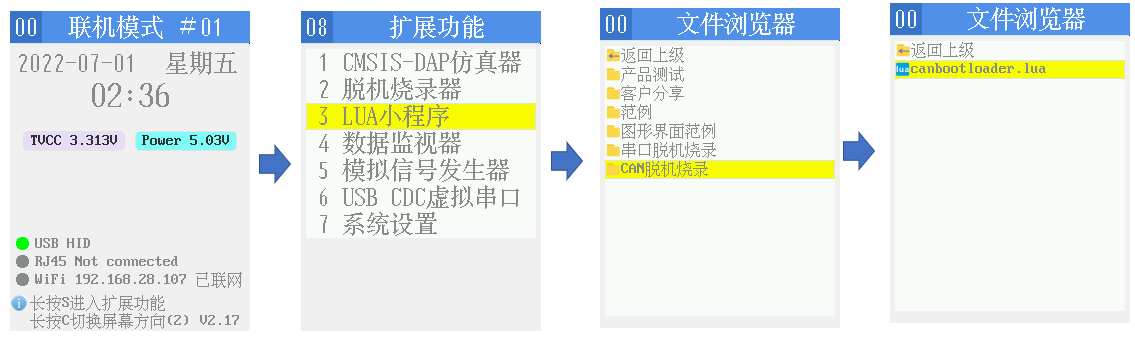
执行uartfirmware.lua小程序。
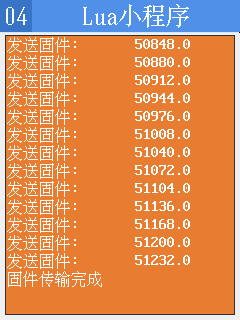
执行效果如下:
【Lua小程序简单说明】
注释非常详细:
------------------------------------------------------- -- -- H7-TOOL CAN FD脱机烧录Lua小程序实现 -- ------------------------------------------------------- local str local len local bytes local bin local offset local value local count local filesize local byte0 local byte1 local byte2 local byte3 local filepath = "0:/H7-TOOL/Lua/CAN脱机烧录/app.bin" -- 表示CAN脱机烧录文件夹下存的文件 local filepath1 = "0:/H7-TOOL/Lua/CAN脱机烧录" -- 浏览CAN脱机烧录文件下存的文件 local can_id = 0x111 -- 目标板的ID local str_offset local str_offset1 ------------------------------------------------------- -- 第1步:浏览串口脱机烧录文件夹下存的文件 ------------------------------------------------------- f_dir(filepath1) print() ------------------------------------------------------- -- 第2步:CAN FD配置 ------------------------------------------------------- print("CAN FD测试") --第1个参数 ----open,close,send,recive --第2个参数 ----- 0 表示FDCAN_FRAME_CLASSIC ----- 1 表示FDCAN_FRAME_FD_NO_BRS ----- 2 表示FDCAN_FRAME_FD_BRS --第3个参数,支持的数据个数 ---- 表示64个字节 --第4个参数,仲裁阶段波特率 --第5个参数,数据阶段波特率 can_bus("open", 2, 64, 500000, 2000000) ------------------------------------------------------- -- 第3步:发送固件大小,方便目标板擦除相应大小扇区 ------------------------------------------------------- -- 获取固件大小 filesize=f_size(filepath) print("============================================") str= string.format("固件大小:%d",filesize) print(str) -- 将固件大小转换成四个字节 byte0 = ((filesize >> 0) & 0xFF) byte1 = ((filesize >> 8) & 0xFF) byte2 = ((filesize >> 16) & 0xFF) byte3 = ((filesize >> 24) & 0xFF) --发送固件大小给目标板 --发送*号表示固件大小命令 --发送固件大小 --固定发送64字节 str_offset = string.format("%02d", 64 - 5) str= string.format("%c%c%c%c%c".."%"..str_offset.."s", 42, byte0, byte1, byte2, byte3, "A") print(str) --第1个参数 ----open,close,send,recive --第2个参数 ----ID类型,0表示标准ID,1表示扩展ID --第3个参数 ----0数据帧,1遥控帧 --第4个参数 ----字符串 can_bus("send", 0, 0, can_id, str) print("执行扇区擦除.....") -- 正常这里应该等待CAN返回应答0x30,暂时用延迟实现 delayms(2000) ------------------------------------------------------- -- 第4步:发送固件大小 ------------------------------------------------------- offset = 0 -- 第1个参数是路径,第2个参数的偏移地址,第3个参数读取大小 -- 返回值bytes表示读取的字节数,bin表示都回的数据 bytes, bin = f_read(filepath, 0, 32) offset = offset + bytes -- 读取数据为0,表示传输完毕 while(bytes > 0) do -- 发送$表示开始传输固件命令 -- 发送固件数据给目标板 -- 固定每次发送64个字节 count = 64 - 2 - bytes str_offset = string.format("%02d", count) str_offset1 = string.format("%"..str_offset.."s", "A") str_offset2 = string.format("$%c", bytes) str= str_offset2..bin..str_offset1 can_bus("send", 0, 0, can_id, str) -- 等待目标板返回确认数据0x30 -- 返回0x30表示发送成功 -- 暂时用延迟实现 delayms(30) bytes, bin = f_read(filepath, offset, 32) -- 继续读取数据 offset = offset + bytes if(bytes ~= 0) then -- 读取不为0,打印发送的总字节数 print("发送固件:", offset) end end ------------------------------------------------------- -- 第5步:发送传输结束命令 ------------------------------------------------------- str_offset = string.format("%02d", 64 - 1) str= string.format("#".."%"..str_offset.."s", "A") can_bus("send", 0, 0, can_id, str) print("固件传输完成") ------------------------------------------------------- -- end of file -------------------------------------------------------
【目标板程序简单说明】
最关键的就是串口程序处理:
【参考资料】
之前更新过三期BootLoader的视频教程,可以作为参考学习:
单片机bootloader专题,启动,跳转配置和调试下载的各种用法
https://www.armbbs.cn/forum.php?mod=viewthread&tid=112792
基于NAND,eMMC,SD卡和U盘的BootLoader实战,带CRC完整性校验
https://www.armbbs.cn/forum.php?mod=viewthread&tid=113053
单片机BootLoader的AES加密实战,含上位机和下位机代码全开源
https://www.armbbs.cn/forum.php?mod=viewthread&tid=113361

 浙公网安备 33010602011771号
浙公网安备 33010602011771号