【STM32F429开发板用户手册】第13章 STM32F429启动过程详解
最新教程下载:http://www.armbbs.cn/forum.php?mod=viewthread&tid=93255
第13章 STM32F429启动过程详解
本章教程主要跟大家讲STM32F429的启动过程,这里的启动过程是指从CPU上电复位执行第1条指令开始(汇编文件)到进入C程序main()函数入口之间的部分。启动过程相对来说还是比较重要的,理解了这个过程,对于以后分析程序还是有些帮助的,要不每次看到这个启动过程都会跳过,直接去看主程序了。还有就是以后打算学习RTOS的话,对于这个过程必须有个了解,因为移植的时候涉及到中断向量表。对初学者来说,看这个可能有些吃力,不过不要紧,随着自己做过一些简单的应用之后再来看这章,应该会有很多的帮助,由于我们的V6板子是基于STM32F429BI,所以我们这里主要针对F4系列的启动过程做一下分析,其它系列也是大致相同的。
13.1 初学者重要提示
13.2 各个版本的启动文件介绍
13.3 启动文件分析
13.4 BOOT启动模式
13.5 总结
13.1 初学者重要提示
1、 如果觉得学习本章节吃力的话,推荐看我们早期做的入门视频教程第8章。
http://www.armbbs.cn/forum.php?mod=viewthread&tid=15408 。
13.2 各个版本的启动文件介绍
这里各个版本的意思是指不同的编译器、不同的F4系列对应的启动文件。
13.2.1 不同编译器对应的启动文件
打开我们为本教程提供的工程文件,路径如下:
\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates 在这个文件里面有ST官方为各个编译器提供的启动文件。
看了上面的截图,大家会问怎么没有KEIL MDK呢?其实已经被放在了文件夹arm里面,KEIL公司已经在2005年被ARM公司收购了。开发板大部分例程都是配套了MDK和IAR两个版本,这里重点给大家分析一下MDK的启动文件分析,IAR和MDK的大同小异。
13.2.2 不同F4系列对应的启动文件
先来看一下ARM文件夹里面的文件(当前只有如下两个系列,后期ST会增加新的型号,相应的启动文件也会添加进来):
我们再来打开IAR文件夹里面的文件:

多了一个linker文件夹,用于IAR配置的ICF文件(部分截图):
而启动文件跟MDK里面的一样。
13.3 启动文件分析
鉴于V6开发板使用的是STM32F429BI,下面我们详细的分析一下启动文件startup_stm32f429xx.s。分析前,先掌握一个小技能,遇到不认识的指令或者关键词可以检索。
- 启动 MDK软件,在Help菜单点击 uVision Help

- 点击后弹出如下文件
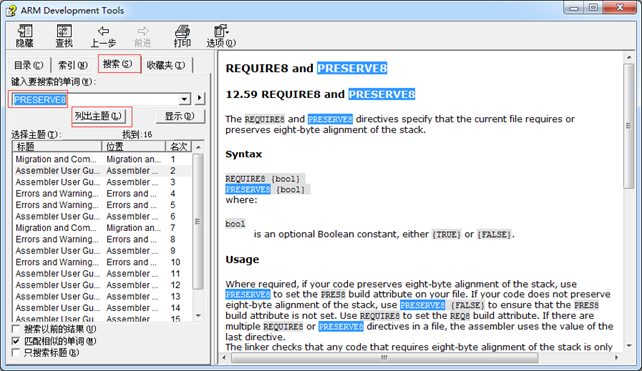
在搜索栏输入你需要查询的单词进行查询,然后点击“列出主题”按钮,会将相关的知识点都罗列出来。此功能非常实用,建议熟练掌握。
下面先来看启动文件前面的介绍:
;******************** (C) COPYRIGHT 2017 STMicroelectronics ******************** ;* File Name : startup_stm32f429xx.s ;* Author : MCD Application Team ;* Description : STM32F429x devices vector table for MDK-ARM toolchain. ;* This module performs: ;* - Set the initial SP ;* - Set the initial PC == Reset_Handler ;* - Set the vector table entries with the exceptions ISR address ;* - Branches to __main in the C library (which eventually ;* calls main()). ;* After Reset the CortexM4 processor is in Thread mode, ;* priority is Privileged, and the Stack is set to Main. ;* <<< Use Configuration Wizard in Context Menu >>> ;*******************************************************************************
启动文件是后缀为.s的汇编语言文本文件,每行前面的分号表示此行是注释行。
启动文件主要完成如下工作,即程序执行过程:
- 设置堆栈指针SP = __initial_sp。
- 设置PC指针 = Reset_Handler。
- 设置中断向量表。
- 配置系统时钟。
- 配置外部SRAM/SDRAM用于程序变量等数据存储(这是可选的)。
- 跳转到C库中的 __main ,最终会调用用户程序的main()函数。
Cortex-M内核处理器复位后,处于线程模式,指令权限是特权级别(最高级别),堆栈设置为使用主堆栈MSP。
13.3.1 复位序列
硬件复位之后,CPU 内的时序逻辑电路首先完成如下两个工作(程序代码下载到内部flash为例,flash首地址0x0800 0000)
- 将0x08000000位置存放的堆栈栈顶地址存放到SP中(MSP)。
- 将0x08000004 位置存放的向量地址装入 PC 程序计数器。
CPU 从 PC 寄存器指向的物理地址取出第 1 条指令开始执行程序,也就是开始执行复位中断服务程序 Reset_Handler。

复位中断服务程序会调用SystemInit()函数来配置系统时钟、配置FMC总线上的外部SRAM/SDRAM,然后跳转到C 库中__main 函数。由C库中的__main 函数完成用户程序的初始化工作(比如:变量赋初值等),最后由__main 函数调用用户写的 main()函数开始执行 C 程序。
13.3.2 代码分析
- 第1部分代码分析
下面的代码实现开辟栈(stack)空间,用于局部变量、函数调用、函数的参数等。
1. ; Amount of memory (in bytes) allocated for Stack 2. ; Tailor this value to your application needs 3. ; <h> Stack Configuration 4. ; <o> Stack Size (in Bytes) <0x0-0xFFFFFFFF:8> 5. ; </h> 6. 7. Stack_Size EQU 0x00000800 8. 9. AREA STACK, NOINIT, READWRITE, ALIGN=3 10. Stack_Mem SPACE Stack_Size 11. __initial_sp
第7行:EQU 是表示宏定义的伪指令,类似于 C 语言中的#define。伪指令的意思是指这个“指令”并不会生成二进制程序代码,也不会引起变量空间分配。
0x00000800 表示栈大小,注意这里是以字节为单位。
第9行:开辟一段数据空间可读可写,段名 STACK,按照 8 字节对齐。ARER 伪指令表示下面将开始定义一个代码段或者数据段。此处是定义数据段。ARER 后面的关键字表示这个段的属性。
STACK :表示这个段的名字,可以任意命名。
NOINIT:表示此数据段不需要填入初始数据。
READWRITE:表示此段可读可写。
ALIGN=3 :表示首地址按照 2 的 3 次方对齐,也就是按照 8 字节对齐(地址对8求余数等于0)。
第10行:SPACE 这行指令告诉汇编器给 STACK 段分配 0x00000800 字节的连续内存空间。
第11行: __initial_sp 紧接着 SPACE 语句放置,表示了栈顶地址。__initial_sp 只是一个标号,标号主要用于表示一片内存空间的某个位置,等价于 C 语言中的“地址”概念。地址仅仅表示存储空间的一个位置,从 C 语言的角度来看,变量的地址,数组的地址或是函数的入口地址在本质上并无区别。
- 第2部分代码分析
下面的代码实现开辟堆(heap)空间,主要用于动态内存分配,也就是说用 malloc,calloc, realloc等函数分配的变量空间是在堆上。
1. ; <h> Heap Configuration 2. ; <o> Heap Size (in Bytes) <0x0-0xFFFFFFFF:8> 3. ; </h> 4. 5. Heap_Size EQU 0x00000400 6. 7. AREA HEAP, NOINIT, READWRITE, ALIGN=3 8. __heap_base 9. Heap_Mem SPACE Heap_Size 10. __heap_limit
这几行语句和上面第1部分代码类似。分配一片连续的内存空间给名字叫 HEAP 的段,也就是分配堆空间。堆的大小为 0x00000400。
__heap_base 表示堆的开始地址。
__heap_limit 表示堆的结束地址。
- 第3部分代码分析
1. PRESERVE8 2. THUMB 3. 4. 5. ; Vector Table Mapped to Address 0 at Reset 6. AREA RESET, DATA, READONLY 7. EXPORT __Vectors 8. EXPORT __Vectors_End 9. EXPORT __Vectors_Size
第1行:PRESERVE8 指定当前文件保持堆栈八字节对齐。
第2行:THUMB表示后面的指令是THUMB指令集 ,CM4采用的是THUMB - 2指令集。
第6行:AREA定义一块代码段,只读,段名字是 RESET。READONLY 表示只读,缺省就表示代码段了。
第7-9行:3 行EXPORT语句将 3 个标号申明为可被外部引用, 主要提供给链接器用于连接库文件或其他文件。
- 第4部分代码分析
1. __Vectors DCD __initial_sp ; Top of Stack 2. DCD Reset_Handler ; Reset Handler 3. DCD NMI_Handler ; NMI Handler 4. DCD HardFault_Handler ; Hard Fault Handler 5. 6. 中间部分省略未写 7. 8. DCD LTDC_ER_IRQHandler ; LTDC error 9. DCD DMA2D_IRQHandler ; DMA2D 10. 11. 12. __Vectors_End 13. 14. __Vectors_Size EQU __Vectors_End - __Vectors
上面的这段代码是建立中断向量表,中断向量表定位在代码段的最前面。具体的物理地址由链接器的配置参数(IROM1 的地址)决定。如果程序在 Flash 运行,则中断向量表的起始地址是 0x08000000。
以MDK为例,就是如下配置选项:
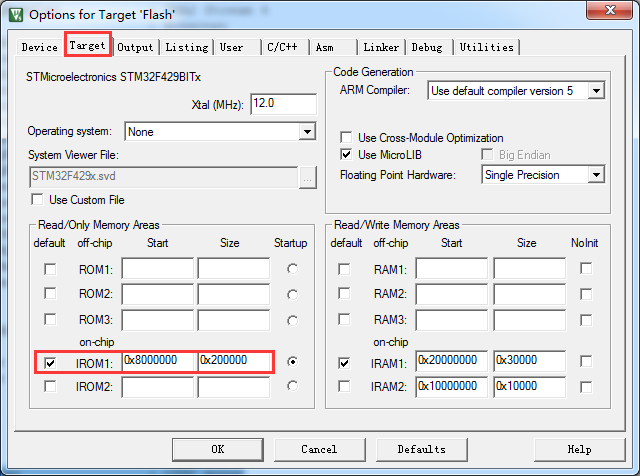
DCD 表示分配 1 个 4 字节的空间。每行 DCD 都会生成一个 4 字节的二进制代码。中断向量表存放的实际上是中断服务程序的入口地址。当异常(也即是中断事件)发生时,CPU 的中断系统会将相应的入口地址赋值给 PC 程序计数器,之后就开始执行中断服务程序。
- 第5部分代码分析
1. AREA |.text|, CODE, READONLY 2. 3. ; Reset handler 4. Reset_Handler PROC 5. EXPORT Reset_Handler [WEAK] 6. IMPORT SystemInit 7. IMPORT __main 8. 9. LDR R0, =SystemInit 10. BLX R0 11. LDR R0, =__main 12. BX R0 13. ENDP
第1行:AREA 定义一块代码段,只读,段名字是 .text 。READONLY 表示只读。
第4行:利用 PROC、ENDP 这一对伪指令把程序段分为若干个过程,使程序的结构加清晰。
第5行:WEAK 声明其他的同名标号优先于该标号被引用,就是说如果外面声明了的话会调用外面的。 这个声明很重要,它让我们可以在C文件中任意地方放置中断服务程序,只要保证C函数的名字和向量表中的名字一致即可。
第6行:IMPORT:伪指令用于通知编译器要使用的标号在其他的源文件中定义。但要在当前源文件中引用,而且无论当前源文件是否引用该标号,该标号均会被加入到当前源文件的符号表中。
第9行:SystemInit 函数在文件system_stm32f4xx.c 里面,主要实现RCC相关寄存器复位和中断向量表位置设置。
第11行:__main 标号表示C/C++标准实时库函数里的一个初始化子程序__main 的入口地址。该程序的一个主要作用是初始化堆栈(跳转__user_initial_stackheap 标号进行初始化堆栈的,下面会讲到这个标号),并初始化映像文件,最后跳转到 C 程序中的 main函数。这就解释了为何所有的 C 程序必须有一个 main 函数作为程序的起点。因为这是由 C/C++标准实时库所规,并且不能更改。
- 第6部分代码分析
代码如下:
1. ; Dummy Exception Handlers (infinite loops which can be modified) 2. 3. NMI_Handler PROC 4. EXPORT NMI_Handler [WEAK] 5. B . 6. ENDP 7. HardFault_Handler\ 8. PROC 9. EXPORT HardFault_Handler [WEAK] 10. B . 11. ENDP 12. 13. 中间部分省略未写 14. Default_Handler PROC 15. 16. EXPORT WWDG_IRQHandler [WEAK] 17. EXPORT PVD_AVD_IRQHandler [WEAK] 18. EXPORT TAMP_STAMP_IRQHandler [WEAK] 19. 中间部分省略未写 20. LTDC_ER_IRQHandler 21. DMA2D_IRQHandler 22. 23. B . 24. 25. ENDP 26. 27. ALIGN
第5行:死循环,用户可以在此实现自己的中断服务程序。不过很少在这里实现中断服务程序,一般多是在其它的C文件里面重新写一个同样名字的中断服务程序,因为这里是WEEK弱定义的。如果没有在其它文件中写中断服务器程序,且使能了此中断,进入到这里后,会让程序卡在这个地方。
第14行:缺省中断服务程序(开始)
第23行:死循环,如果用户使能中断服务程序,而没有在C文件里面写中断服务程序的话,都会进入到这里。比如在程序里面使能了串口1中断,而没有写中断服务程序USART1_IRQHandle,那么串口中断来了,会进入到这个死循环。
第25行:缺省中断服务程序(结束)。
- 第7部分代码分析
启动代码的最后一部分:
1. ;******************************************************************************* 2. ; User Stack and Heap initialization 3. ;******************************************************************************* 4. IF :DEF:__MICROLIB 5. 6. EXPORT __initial_sp 7. EXPORT __heap_base 8. EXPORT __heap_limit 9. 10. ELSE 11. 12. IMPORT __use_two_region_memory 13. EXPORT __user_initial_stackheap 14. 15. __user_initial_stackheap 16. 17. LDR R0, = Heap_Mem 18. LDR R1, =(Stack_Mem + Stack_Size) 19. LDR R2, = (Heap_Mem + Heap_Size) 20. LDR R3, = Stack_Mem 21. BX LR 22. 23. ALIGN 24. 25. ENDIF 26. 27. END
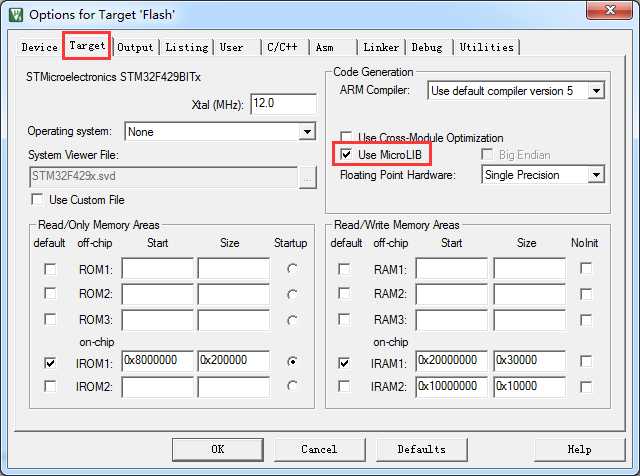
第4行:简单的汇编语言实现IF…….ELSE…………语句。如果定义了MICROLIB,那么程序是不会执行ELSE分支的代码。__MICROLIB可能大家并不陌生,就在MDK的Target Option里面设置。
第5行:__user_initial_stackheap将由__main函数进行调用。
- MicroLib
MicroLib是MDK里面带的微库,针对嵌入式应用,MicroLIB做了深度优化,比使用C标准库所需的RAM和FLASH空间都大大减小比如调用:<math.h>,<stdlib.h>,<stdio.h>,<string.h>
更多相关知识可以地址:http://www.keil.com/arm/microlib.asp。另外注意microlib只有库,没有源文件。下图是标准库和微库生成代码的比较。

13.4 BOOT启动模式
STM32F429支持的启动方式如下:

- 从Flash启动(正常运行时选择这种模式)。
- 从系统存储器启动(做ISP下载时用)。
- 从内嵌SRAM启动(调试用,一般很少使用)。
具体到原理图上的设计如下:
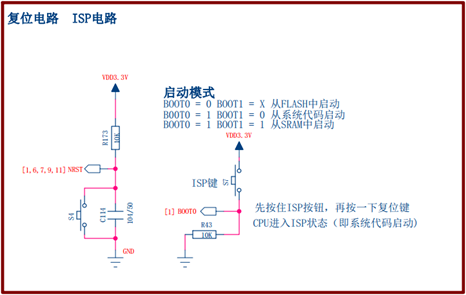

- 如果仅作从Flash驱动,可以将BOOT0和BOOT1直接接地,不需要电阻。
- 从SRAM启动,BOOT1固定取低电平,BOOT0可以取高电平或者低电平。注意硬件上不支持从SRAM启动。因为掉电后,SRAM中的数据消失。
- 电阻R43和按键配合,实现高低电平的切换。
- 电阻R55起到GPIO复用的功能,系统上电复位后可以检测BOOT1引脚转态,开始工作后可以用来做RS485的发送使能控制。
- ISP(In-System Programming)
在系统可编程,就是说在PCB板子上面直接烧录,不需要将单片机取下来用烧录器烧写。ISP功能可以通过非常简单廉价的下载线直接在电路板上给单片机下载程序或者擦除程序,免去插来插去的麻烦。
13.5 总结
本章节讲解的启动过程分析还是比较重要的,忘初学者务必掌握。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号