【STM32F429开发板用户手册】第10章 STM32F429的FLASH,RAM和栈使用情况(map和htm文件)
最新教程下载:http://www.armbbs.cn/forum.php?mod=viewthread&tid=93255
第10章 STM32F429的FLASH,RAM和栈使用情况(map和htm文件)
本章为大家介绍编译器生成的map和htm文件进行解析,通过这两个文件可以让大家对工程代码的认识程度提升一个档次。
10.1 初学者重要提示
10.2 MAP文件分析
10.3 HTM文件分析
10.4 总结
10.1 初学者重要提示
1、 为了更好的学习本章知识点,可以看之前做的视频教程第11章:
http://www.armbbs.cn/forum.php?mod=viewthread&tid=15408 。
2、 本章节以MDK为例进行说明,使用IAR同理。
10.2 MAP文件分析
通过map文件,可以方便的查看工程ROM/FLASH和RAM的占用情况,包括单个源文件,甚至具体到每个函数的rom大小都给出了,通过这些信息可以很好的进行代码优化。MAP文件的内容可分为如下几部分:
- Section Cross References
- Removing Unused input sections from the image
- Image Symbol Table (Local Symbols Global Symbols)
- Memory Map of the image
- Image component sizes
下面将这个几个部分的含义逐一为大家做个说明。
10.2.1 MDK配置
要生成MAP文件,MDK中如下选项要选上:

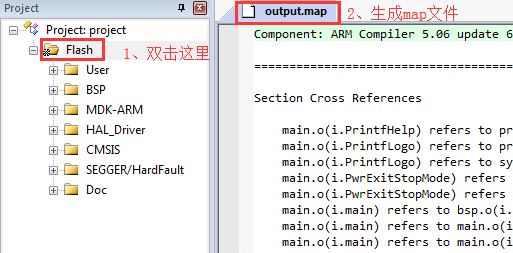
将工程全编译,且没有错误后,双击这里就可以看到生成的map文件了:
10.2.2 MAP文件相关概念
认识MAP文件前先熟悉如下概念:
- 段(section) :描述映像文件的代码和数据块。
- RO: Read-Only的缩写,包括RO-data(只读数据)和RO-code(代码)。
- RW:Read-Write的缩写,主要是RW-data,RW-data由程序初始化初始值。
- ZI: Zero-initialized的缩写,主要是ZI-data,由编译器初始化为0。
- .text:与RO-code同义。
- .constdata:与RO-data同义。
- .bss: 与ZI-data同义。
- .data:与RW-data同义
10.2.3 Section Cross References
这部分主要是不同文件中函数的调用关系(部分截图)
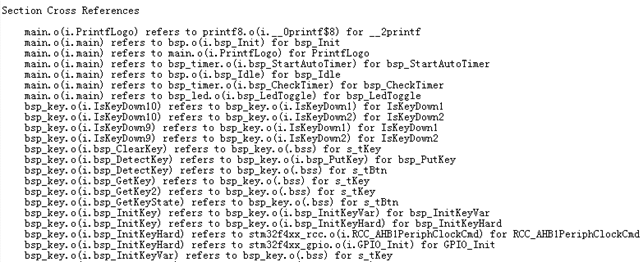
比如这句:main.o(i.main) refers to main.o(i.bsp_Init) for bsp_Init表示main.c文件中的main函数调用了bsp_Init。
10.2.4 Removing Unused input sections from the image
这部分主要是被删除的冗余函数,也就是添加到工程里面,但是没有调用到的,下面是部分被删除冗余函数的截图效果:
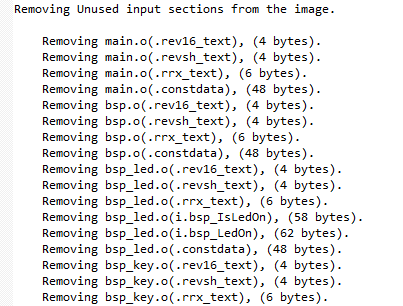
对于这个部分功能,用户最好将MDK中这个选项勾上,然后全编译工程,效果会比较好:

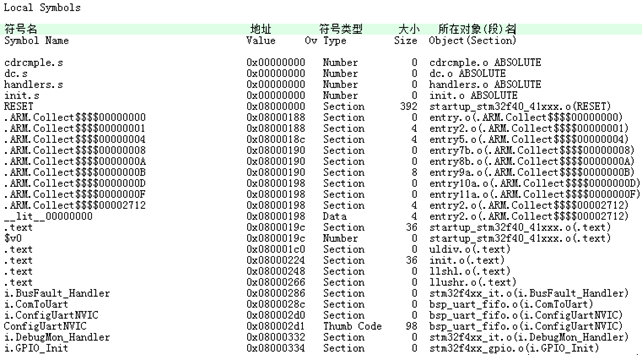
10.2.5 Image Symbol Table
Image Symbol Table主要分为两类,分别是Local Symbols和Global Symbols。
- Local Symbols
Local Symbols记录了用static声明的全局变量地址和大小,C文件中函数的地址和用static声明的函数代码大小,汇编文件中的标号地址(作用域限本文件),下面是部分截图:
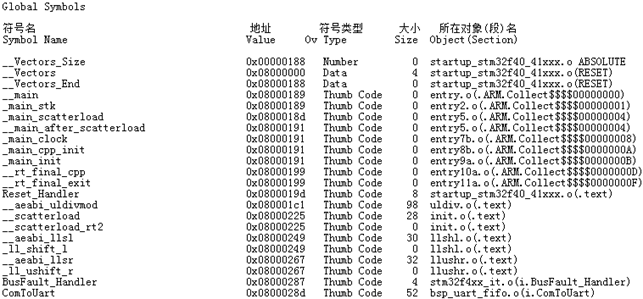
- Global Symbols
Global Symbols记录了全局变量的地址和大小,C文件中函数的地址及其代码大小,汇编文件中的标号地址(作用域全工程),下面是部分截图:
10.2.6 Memory Map of the image
映像文件可以分为加载域(Load Region)和运行域(Execution Region):加载域反映了ARM可执行映像文件的各个段存放在存储器中的位置关系。下面是部分截图,另外映像中的入口点就是程序开始执行的位置。

运行域反映了ARM可执行映像文件各个段真正执行时在存储器中的位置关系:

简单的说,加载域就是程序在Flash中的实际存储,而运行域是芯片上电后的运行状态,通过下面的框图可以有一个感性的认识:
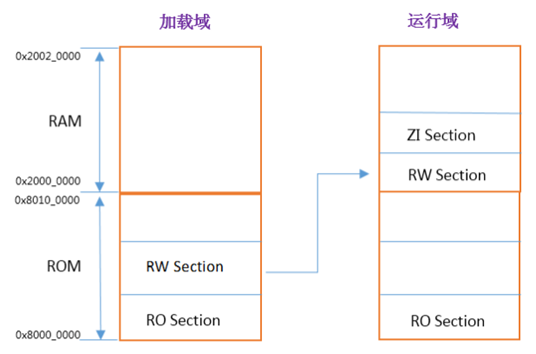
通过上面的框图可以看出,RW区也是要存储到ROM/Flash里面的,在执行映像之前,必须将已初始化的RW数据从ROM中复制到RAM中的执行地址并创建ZI Section(初始化为0的变量区)。
10.2.7 Image component sizes
Image component sizes映像组件大小比较重要,比如下面内容代表的含义:
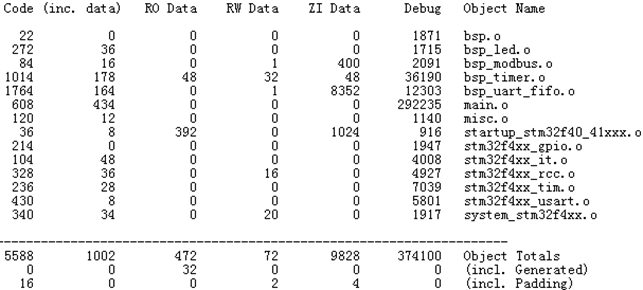
- Code (inc. Data) :显示代码占用了多少字节。 在此映像中,有19442字节的代码, 其中包括1832字节的内联数据 (inc. data),例如文字池和短字符串。
- RO Data :显示只读数据占用了多少字节(比如const char buf[] = "123456")。这是除 Code (inc. data) 列中包括的内联数据之外的数据。
- RW Data :显示读写数据占用了多少字节。
- ZI Data :显示零初始化的数据占用了多少字节。
- Debug :显示调试数据占用了多少字节,例如,调试输入节以及符号和字符串。
- Object Totals :显示链接到一起以生成映像的对象占用了多少字节。
- (incl. Generated):链接器会生成的映像内容,例如,交互操作中间代码。 如果 Object Totals 行包含此类型的数据,则会显示在该行中。本例中共有 1016 字节的 RO 数据,其中32字节是链接器生成的 RO 数据。
- (incl. Padding) :链接器根据需要插入填充,以强制字节对齐。
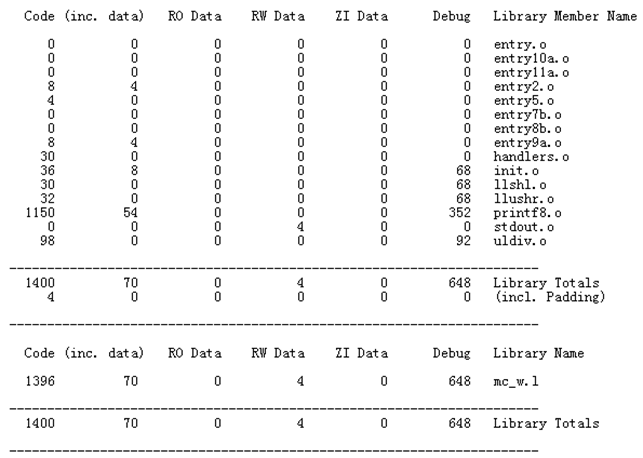
下面的Library Totals显示已提取并作为单个对象添加到映像中的库成员占用了多少字节。
下面是我们经常要查看的内容:
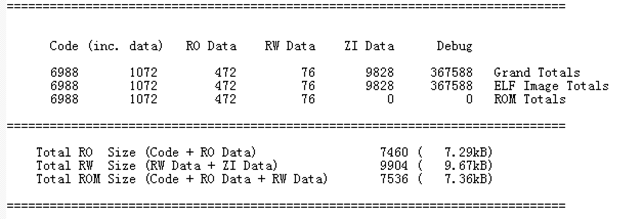
- Grand Totals:显示映像的真实大小。
- ELF Image Totals:ELF(Executable and Linking Format)可执行链接格式映像文件大小。
- ROM Totals:显示包含映像所需的 ROM的最小大小。这不包括 ZI数据和存储在ROM 中的调试信息。
10.3 HTM文件分析
MDK将工程全编译,且没有错误后,就会生成此文件。以开发板配套例子为例,htm文件位于路径:\Project\MDK-ARM(uV5)\Objects。
此文件的最大作用就是基本统计了所有被调用函数的栈stack使用情况(不考虑中断嵌套)。下面是整个工程的最大栈需求:

具体到每个函数也给出最大的栈深度Max Depth,同时也给出函数本身的代码量大小和使用的栈大小,比如函数bsp_InitExtIO,最大栈深度是152字节。函数本身占用代码大小(Thumb指令集)28字节,使用栈8字节。
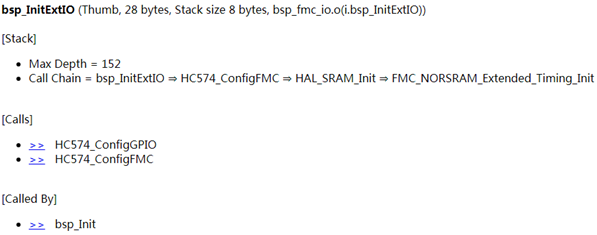
通过这个文件,我们可以合理的配置启动文件里面的stack大小:

10.4 总结
本章节的知识点比较重要,务必要熟练掌握。平时开发工程项目时,可以多关注map文件和htm文件。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号