【STM32H7教程】第38章 STM32H7的LPTIM低功耗定时器应用之超时唤醒
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第38章 STM32H7的LPTIM低功耗定时器应用之超时唤醒
本章教程为大家讲解定时器应用之超时模式的停机唤醒,实际项目中有一定的使用价值,可以方便的配置系统在停机模式运行一段时间,时间到了可以自动唤醒。
38.1 初学者重要提示
38.2 低功耗定时器超时唤醒驱动设计
38.3 低功耗定时器板级支持包(bsp_lptim_pwm.c)
38.4 低功耗定时器驱动移植和使用
38.5 实验例程设计框架
38.6 实验例程说明(MDK)
38.7 实验例程说明(IAR)
38.8 总结
38.1 初学者重要提示
- 学习本章节前,务必优先学习第36章,HAL库的几个常用API均作了讲解和举例。
- 使用LPTIM的好处是系统处于睡眠、停机状态依然可以正常工作(除了待机模式)。停机状态可以正常工作的关键是LSE,LSI时钟不会被关闭,同时也可以选择使用外部时钟源。
- LPTIM的任何中断都可以唤醒停机模式。
- STM32H7从停机模式唤醒后要重新配置系统时钟,这点跟F1,F4系列一样。
- 测试发现STM32H7的LPTIM1的中断可以唤醒停机模式,其它几个LPTIM2-5无法唤醒。详情记录看此贴:http://www.armbbs.cn/forum.php?mod=viewthread&tid=91064
38.2 低功耗定时器超时唤醒驱动设计
低功耗定时器超时唤醒驱动设计中有几个要注意的事项,下面逐一为大家做个说明。
38.2.1 低功耗定时器时钟选择
由前面的第36章节,我们知道LPTIM1的时钟可以由LSE,LSI,APB或者外部输入时钟提供。使用LSE,LSI或者外部输入的好处是停机状态下,LPTIM1也可以正常工作。
- V7开发板使用的LSE晶振是32768Hz。
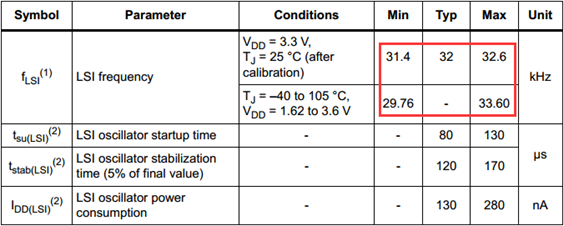
- STM32H743的LSI频率约32KHz。
- LPTIM1 – LPTIM5的频率都是100MHz。
System Clock source = PLL (HSE) SYSCLK(Hz) = 400000000 (CPU Clock) HCLK(Hz) = 200000000 (AXI and AHBs Clock) AHB Prescaler = 2 D1 APB3 Prescaler = 2 (APB3 Clock 100MHz) D2 APB1 Prescaler = 2 (APB1 Clock 100MHz) D2 APB2 Prescaler = 2 (APB2 Clock 100MHz) D3 APB4 Prescaler = 2 (APB4 Clock 100MHz) 因为APB1 prescaler != 1, 所以 APB1上的TIMxCLK = APB1 x 2 = 200MHz; 不含这个总线下的LPTIM1 因为APB2 prescaler != 1, 所以 APB2上的TIMxCLK = APB2 x 2 = 200MHz; APB4上面的TIMxCLK没有分频,所以就是100MHz; APB1 定时器有 TIM2, TIM3 ,TIM4, TIM5, TIM6, TIM7, TIM12, TIM13, TIM14,LPTIM1 APB2 定时器有 TIM1, TIM8 , TIM15, TIM16,TIM17 APB4 定时器有 LPTIM2,LPTIM3,LPTIM4,LPTIM5
下面为大家讲解下使用LSE,LSI或者APB时钟的配置方法。
选择LSE的配置如下:
#define LPTIM_CLOCK_SOURCE_LSE /* LSE 时钟32768Hz */ RCC_PeriphCLKInitTypeDef RCC_PeriphCLKInitStruct = {0}; RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSE; RCC_OscInitStruct.LSEState = RCC_LSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; if (HAL_RCC_OscConfig(&RCC_OscInitStruct)!= HAL_OK) { Error_Handler(__FILE__, __LINE__); } RCC_PeriphCLKInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM1; RCC_PeriphCLKInitStruct.Lptim1ClockSelection = RCC_LPTIM1CLKSOURCE_LSE; HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphCLKInitStruct);
特别注意程序中置红的地方,这几个地方很容易配置错。配置后LPTIM1就会将LSE作为系统时钟。
选择LSI的配置如下:
//#define LPTIM_CLOCK_SOURCE_LSI /* LSI 时钟约32KHz */ RCC_PeriphCLKInitTypeDef RCC_PeriphCLKInitStruct = {0}; RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI; RCC_OscInitStruct.LSIState = RCC_LSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; if (HAL_RCC_OscConfig(&RCC_OscInitStruct)!= HAL_OK) { Error_Handler(__FILE__, __LINE__); } RCC_PeriphCLKInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM1; RCC_PeriphCLKInitStruct.Lptim1ClockSelection = RCC_LPTIM1CLKSOURCE_LSI; HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphCLKInitStruct);
使用LSI作为LPTIM1的系统是要注意两点:
1、LSI的实现有一定的误差,具体范围在数据手册有给出,由于不支持温补,温度对其也是有影响的。
2、特别注意程序中置红的地方,这几个地方很容易跟LSE搞混淆(复制粘贴的时候容易搞错)。
选择APB时钟的配置如下:
RCC_PeriphCLKInitTypeDef RCC_PeriphCLKInitStruct = {0};
RCC_PeriphCLKInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM1;
RCC_PeriphCLKInitStruct.Lptim1ClockSelection = RCC_LPTIM1CLKSOURCE_D2PCLK1;
HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphCLKInitStruct);
使用APB作为LPTIM系统时钟注意以下两点:
1、 LPTIM1 – LPTIM5的最高主频都是100MHz。
2、 注意参数RCC_LPTIM1CLKSOURCE_D2PCLK1。
LPTIM1使用的RCC_LPTIM1CLKSOURCE_D2PCLK1。
LPTIM2使用的RCC_LPTIM2CLKSOURCE_D3PCLK1。
LPTIM3-LPTIM5使用的RCC_LPTIM345CLKSOURCE_D3PCLK1。
38.2.2 低功耗定时器超时模式配置
下面使用LSE做低功耗定时器的系统时钟,做了8分频,并开启LPTIM1的超时中断。
1. /* 选择LPTIM的时钟源 */ 2. #define LPTIM_CLOCK_SOURCE_LSE /* LSE 时钟32768Hz */ 3. //#define LPTIM_CLOCK_SOURCE_LSI /* LSI 时钟32768Hz */ 4. //#define LPTIM_CLOCK_SOURCE_PCLK /* PCLK 时钟100MHz */ 5. 6. LPTIM_HandleTypeDef LptimHandle = {0}; 7. 8. /* 9. ****************************************************************************************************** 10. * 函 数 名: bsp_InitLPTIM 11. * 功能说明: 初始化LPTIM 12. * 形 参: 无 13. * 返 回 值: 无 14. ****************************************************************************************************** 15. */ 16. void bsp_InitLPTIM(void) 17. { 18. RCC_PeriphCLKInitTypeDef RCC_PeriphCLKInitStruct = {0}; 19. 20. 21. /* ## - 1 - 使能LPTIM时钟和GPIO时钟 ####################################### */ 22. __HAL_RCC_LPTIM1_CLK_ENABLE(); 23. 24. /* ## - 2 - 配置LPTIM时钟,可以选择LSE,LSI或者PCLK ######################## */ 25. #if defined (LPTIM_CLOCK_SOURCE_LSE) 26. { 27. RCC_OscInitTypeDef RCC_OscInitStruct = {0}; 28. 29. RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSE; 30. RCC_OscInitStruct.LSEState = RCC_LSE_ON; 31. RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; 32. 33. if (HAL_RCC_OscConfig(&RCC_OscInitStruct)!= HAL_OK) 34. { 35. Error_Handler(__FILE__, __LINE__); 36. } 37. 38. RCC_PeriphCLKInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM1; 39. RCC_PeriphCLKInitStruct.Lptim1ClockSelection = RCC_LPTIM1CLKSOURCE_LSE; 40. HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphCLKInitStruct); 41. } 42. #elif defined (LPTIM_CLOCK_SOURCE_LSI) 43. { 44. RCC_OscInitTypeDef RCC_OscInitStruct = {0}; 45. 46. RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI; 47. RCC_OscInitStruct.LSIState = RCC_LSI_ON; 48. RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; 49. 50. if (HAL_RCC_OscConfig(&RCC_OscInitStruct)!= HAL_OK) 51. { 52. Error_Handler(__FILE__, __LINE__); 53. } 54. 55. RCC_PeriphCLKInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM1; 56. RCC_PeriphCLKInitStruct.Lptim1ClockSelection = RCC_LPTIM1CLKSOURCE_LSI; 57. HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphCLKInitStruct); 58. } 59. #elif defined (LPTIM_CLOCK_SOURCE_PCLK) 60. RCC_PeriphCLKInitStruct.PeriphClockSelection = RCC_PERIPHCLK_LPTIM1; 61. RCC_PeriphCLKInitStruct.Lptim1ClockSelection = RCC_LPTIM1CLKSOURCE_LSE; 62. HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphCLKInitStruct); 63. #else 64. #error Please select the LPTIM Clock source inside the bsp_lptim_pwm.c file 65. #endif 66. 67. /* ## - 3 - 配置LPTIM ######################################################## */ 68. LptimHandle.Instance = LPTIM1; 69. /* 对应寄存器CKSEL,选择内部时钟源 */ 70. LptimHandle.Init.Clock.Source = LPTIM_CLOCKSOURCE_APBCLOCK_LPOSC; 71. /* 设置LPTIM时钟分频 */ 72. LptimHandle.Init.Clock.Prescaler = LPTIM_PRESCALER_DIV8; 73. /* LPTIM计数器对内部时钟源计数 */ 74. LptimHandle.Init.CounterSource = LPTIM_COUNTERSOURCE_INTERNAL; 75. /* 软件触发 */ 76. LptimHandle.Init.Trigger.Source = LPTIM_TRIGSOURCE_SOFTWARE; 77. /* 超时模式用不到这个配置 */ 78. LptimHandle.Init.OutputPolarity = LPTIM_OUTPUTPOLARITY_HIGH; 79. /* 比较寄存器和ARR自动重载寄存器选择更改后立即更新 */ 80. LptimHandle.Init.UpdateMode = LPTIM_UPDATE_IMMEDIATE; 81. /* 外部输入1,本配置未使用 */ 82. LptimHandle.Init.Input1Source = LPTIM_INPUT1SOURCE_GPIO; 83. /* 外部输入2,本配置未使用 */ 84. LptimHandle.Init.Input2Source = LPTIM_INPUT2SOURCE_GPIO; 85. 86. if (HAL_LPTIM_Init(&LptimHandle) != HAL_OK) 87. { 88. Error_Handler(__FILE__, __LINE__); 89. } 90. 91. /* ## - 4 - 配置LPTIM ######################################################## */ 92. /* 配置中断优先级并使能中断 */ 93. HAL_NVIC_SetPriority(LPTIM1_IRQn, 1, 0); 94. HAL_NVIC_EnableIRQ(LPTIM1_IRQn); 95. }
这里把几个关键的地方阐释下:
- 第2行,LPTIM1的系统时钟选项LSE,频率32768Hz。
- 第68 – 89行,第36章的3.2小节对这些参数成员有详细描述。
- 第76行,低功耗定时器的超时模式使用软件触发或者外部触发均可以正常工作。
- 第93 -94行,配置LPTIM1的中断优先级并使能中断。
38.2.3 低功耗定时器超时模式启动
启动低功耗定时器:
1. /* 2. ****************************************************************************************************** 3. * 函 数 名: bsp_StartLPTIM 4. * 功能说明: 启动LPTIM 5. * 形 参: 无 6. * 返 回 值: 无 7. ****************************************************************************************************** 8. */ 9. void bsp_StartLPTIM(void) 10. { 11. /* 12. ARR是自动重装寄存器,对应函数HAL_LPTIM_TimeOut_Start_IT的第2个参数 13. Compare是比较寄存器,对应函数HAL_LPTIM_TimeOut_Start_IT的第3个参数 14. 15. --------------------- 16. LSE = 32768Hz 17. 分频设置为LPTIM_PRESCALER_DIV8,即8分频(函数bsp_InitLPTIM里面做的初始化配置) 18. ARR自动重载寄存器 = 32768 19. 实际测试发现溢出中断与ARR寄存器无关,全部由第3个参数,Compare寄存器决定 20. 21. LPTIM的计数器计数1次的时间是 1 / (32768 / 8) = 8 /32768。 22. 第三个参数配置的是32767,那么计数到32767就是 (32767 + 1)*(8 /32768) = 8秒,计算的时候要加1。 23. */ 24. if (HAL_LPTIM_TimeOut_Start_IT(&LptimHandle, 0, 32767) != HAL_OK) 25. { 26. Error_Handler(__FILE__, __LINE__); 27. } 28. }
这里把几个关键的地方阐释下:
- 程序里面的注释已经比较详细,特别注意函数HAL_LPTIM_TimeOut_Start_IT的第2个参数在超时模式没有任何作用。主要是通过第3个参数配置超时时间。
- 函数HAL_LPTIM_TimeOut_Start_IT开启的是比较匹配中断,所以实际的超时时间由Compare寄存器决定。
38.2.4 低功耗定时器中断处理
低功耗定时器中断的实现如下:
1. /* 2. ****************************************************************************************************** 3. * 函 数 名: LPTIM1_IRQHandler 4. * 功能说明: LPTIM1中断服务程序 5. * 形 参: 无 6. * 返 回 值: 无 7. ****************************************************************************************************** 8. */ 9. void LPTIM1_IRQHandler(void) 10. { 11. if((LPTIM1->ISR & LPTIM_FLAG_CMPM) != RESET) 12. { 13. /* 清除比较匹配中断 */ 14. LPTIM1->ICR = LPTIM_FLAG_CMPM; 15. 16. /* 关闭溢出中断 */ 17. HAL_LPTIM_TimeOut_Stop_IT(&LptimHandle); 18. 19. bsp_LedToggle(4); 20. } 21. }
这里把几个关键的地方阐释下:
- 程序中没有使用HAL整理的中断处理函数HAL_LPTIM_IRQHandler,而是直接使用寄存器判断的方式,效果高些。
- 第14行,函数HAL_LPTIM_TimeOut_Start_IT开启的是比较匹配中断,所以这里要清除对应的标识。
- 第17行,关闭超时中断,下次使用时再开启。
38.2.5 低功耗定时器超时唤醒注意事项
这里再强调下低功耗定时器唤醒的三个注意事项。
- LPTIM的任何中断都可以唤醒停机模式。
- STM32H7从停机模式唤醒后要重新配置系统时钟,这点跟F1,F4系列一样。
- 测试发现STM32H7的LPTIM1的中断可以唤醒停机模式,其它几个LPTIM2-5无法唤醒。详情记录看此贴:http://www.armbbs.cn/forum.php?mod=viewthread&tid=91064
38.3 低功耗定时器板级支持包(bsp_lptim_pwm.c)
低功耗定时器驱动文件bsp_lptim_pwm.c供用户调用的两个函数:
- bsp_InitLPTIM
- bsp_StartLPTIM
下面将这两个函数的使用为大家做个说明。
38.3.1 函数bsp_InitLPTIM
函数原型:
void bsp_InitLPTIM(void)
函数描述:
此函数使用LSE做低功耗定时器的系统时钟,做了8分频,并开启LPTIM1的超时中断。
注意事项:
- 关于此函数的相关注意事项在本章的38.2.2小节有详细说明。
使用举例:
初始化函数在bsp.c文件的bsp_Init函数里面调用。
38.3.2 函数bsp_StartLPTIM
函数原型:
void bsp_StartLPTIM(void)
函数描述:
此函数通过调用函数HAL_LPTIM_TimeOut_Start_IT来启动低功耗定时器的超时模式,并开启了相应中断。
注意事项:
- 关于此函数的相关注意事项和解读在本章的38.2.3小节有详细说明。
使用举例:
调用此函数前优先调用初始化函数bsp_InitLPTIM即可。
38.4 低功耗定时器驱动移植和使用
低功耗定时器的移植比较简单:
- 第1步:复制bsp_lptim_pwm.c和bsp_lptim_pwm.h到自己的工程目录,并添加到工程里面。
- 第2步:这几个驱动文件主要用到HAL库的GPIO和LPTIM驱动文件,简单省事些可以添加所有HAL库.C源文件进来。
- 第3步,应用方法看本章节配套例子即可。
38.5 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:

第1阶段,上电启动阶段:
- 这部分在第14章进行了详细说明。
第2阶段,进入main函数:
- 第1步,硬件初始化,主要是MPU,Cache,HAL库,系统时钟,滴答定时器,LED和串口
- 第2步,借助按键消息实现低功耗定时器的效果测试。
38.6 实验例程说明(MDK)
配套例子:
V7-022_低功耗定时器超时模式的停机唤醒
实验目的:
- 习低功耗定时器超时模式的停机唤醒。
实验内容:
- 使用LPTIM的好处是系统处于睡眠,停机状态依然可以正常工作(除了待机模式)。停机状态可以正常工作的关键是LSE,LSI时钟不会被关闭,同时也可以选择使用外部时钟源。
- 例子默认用的LSE时钟供LPTIM1使用,大家可以通过bsp_lptim_pwm.c文件开头宏定义切换到LSI或者PLCK。
- 本例子利用LPTIM的超时功能,配置8秒后唤醒停机模式。
- 板子正常运行时LED2闪烁,进入停机模式后,LED2停止闪烁。
- 进入LPTIM的超时中断后,LED4翻转,方便查看是否正常执行。
实验操作:
- K1键按下,进入停机模式, 8秒后自动唤醒。
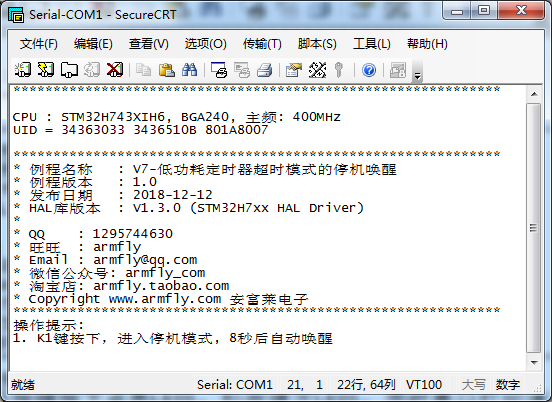
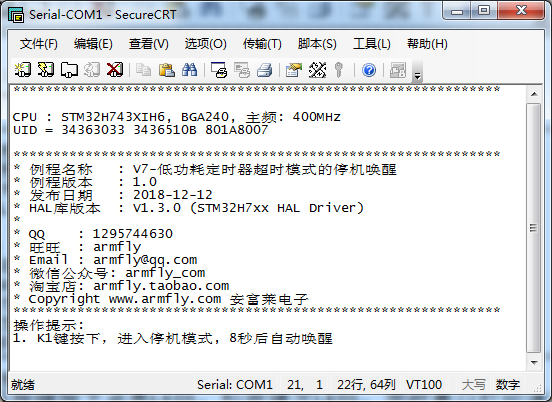
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
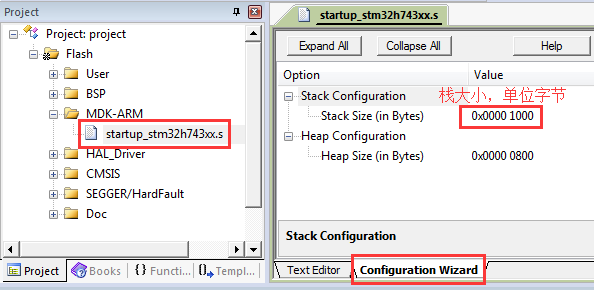
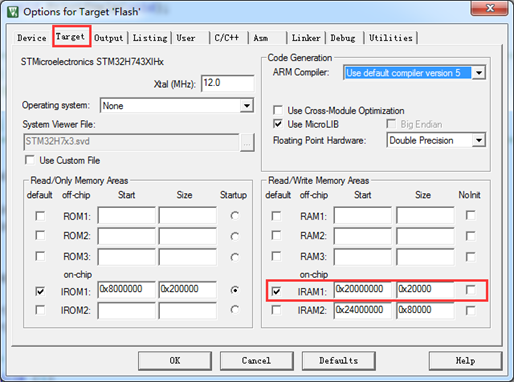
系统栈大小分配:
RAM空间用的DTCM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* 配置MPU */ MPU_Config(); /* 使能L1 Cache */ CPU_CACHE_Enable(); /* STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到400MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */ bsp_InitLed(); /* 初始化LED */ }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
/* ********************************************************************************************************* * 函 数 名: MPU_Config * 功能说明: 配置MPU * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void MPU_Config( void ) { MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */ HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x24000000; MPU_InitStruct.Size = MPU_REGION_SIZE_512KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER0; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x60000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER1; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */ HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT); } /* ********************************************************************************************************* * 函 数 名: CPU_CACHE_Enable * 功能说明: 使能L1 Cache * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void CPU_CACHE_Enable(void) { /* 使能 I-Cache */ SCB_EnableICache(); /* 使能 D-Cache */ SCB_EnableDCache(); }
主功能:
主程序实现如下操作:
- K1键按下,进入停机模式, 8秒后自动唤醒。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔100ms 进来一次 */ bsp_LedToggle(2); } /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */ ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下,进入停机模式, 8秒后自动唤醒 */ printf("--进入停机模式,8秒后唤醒\r\n"); bsp_StartLPTIM(); HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI); SystemClock_Config(); /* 特别注意,退出后要重新配置系统时钟 */ printf("--退出停机模式\r\n"); break; default: /* 其它的键值不处理 */ break; } } } }
38.7 实验例程说明(IAR)
配套例子:
V7-022_低功耗定时器超时模式的停机唤醒
实验目的:
- 习低功耗定时器超时模式的停机唤醒。
实验内容:
- 使用LPTIM的好处是系统处于睡眠,停机状态依然可以正常工作(除了待机模式)。停机状态可以正常工作的关键是LSE,LSI时钟不会被关闭,同时也可以选择使用外部时钟源。
- 例子默认用的LSE时钟供LPTIM1使用,大家可以通过bsp_lptim_pwm.c文件开头宏定义切换到LSI或者PLCK。
- 本例子利用LPTIM的超时功能,配置8秒后唤醒停机模式。
- 板子正常运行时LED2闪烁,进入停机模式后,LED2停止闪烁。
- 进入LPTIM的超时中断后,LED4翻转,方便查看是否正常执行。
实验操作:
- K1键按下,进入停机模式, 8秒后自动唤醒。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
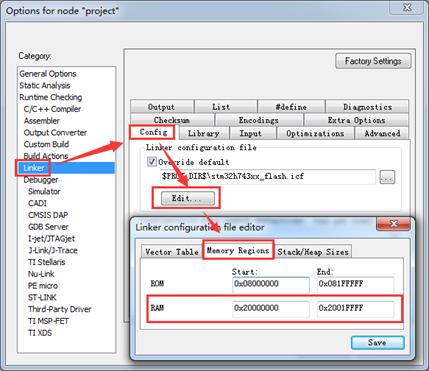
系统栈大小分配:

RAM空间用的DTCM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* 配置MPU */ MPU_Config(); /* 使能L1 Cache */ CPU_CACHE_Enable(); /* STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到400MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */ bsp_InitLed(); /* 初始化LED */ }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
/* ********************************************************************************************************* * 函 数 名: MPU_Config * 功能说明: 配置MPU * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void MPU_Config( void ) { MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */ HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x24000000; MPU_InitStruct.Size = MPU_REGION_SIZE_512KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER0; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x60000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER1; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */ HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT); } /* ********************************************************************************************************* * 函 数 名: CPU_CACHE_Enable * 功能说明: 使能L1 Cache * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void CPU_CACHE_Enable(void) { /* 使能 I-Cache */ SCB_EnableICache(); /* 使能 D-Cache */ SCB_EnableDCache(); }
主功能:
主功能的实现主要分为两部分:
- 获取其它RS485设备发来的命令,并执行相应功能。
通过函数comGetChar(COM3, &ucDataTravel)以查询、非阻塞方式获取其它开发板发来的数据。
- 根据不同的按键消息,向其它485设备发送命令
通过函数comSendChar(COM3, ucDataTravel)以非阻塞方式向其它485设备发送命令,以此来执行同样的功能。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔100ms 进来一次 */ bsp_LedToggle(2); } /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */ ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下,进入停机模式, 8秒后自动唤醒 */ printf("--进入停机模式,8秒后唤醒\r\n"); bsp_StartLPTIM(); HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI); SystemClock_Config(); /* 特别注意,退出后要重新配置系统时钟 */ printf("--退出停机模式\r\n"); break; default: /* 其它的键值不处理 */ break; } } } }
38.8 总结
本章节就为大家讲解这么多,低功耗定时器在低功耗场合比较有用,如果有低功耗方面的项目需求,可以考虑使用这个定时器实现低功耗唤醒。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号