【STM32H7教程】第33章 STM32H7的定时器应用之TIM1-TIM17的中断实现
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第33章 STM32H7的定时器应用之TIM1-TIM17的中断实现
本章教程为大家讲解定时器应用之TIM1 – TIM17所有定时器的周期性中断实现。实际项目中用到的地方较多,特别是周期性的事件查询。
33.1 初学者重要提示
33.2 定时器中断的驱动设计
33.3 定时器板级支持包(bsp_tim_pwm.c)
33.4 定时器驱动移植和使用
33.5 实验例程设计框架
33.6 实验例程说明(MDK)
33.7 实验例程说明(IAR)
33.8 总结
33.1 初学者重要提示
- 学习本章节前,务必优先学习第32章,HAL库的几个常用API均作了讲解和举例。
- STM32H7支持TIM1-TIM8,TIM12-TIM17共14个定时器,而中间的TIM9,TIM10,TIM11是不存在的,这点要注意。
- STM32H7的进出中断的速度能跑到12.5MHz,所有程序在TCM和Flash运行没差别,详情可看本章2.3小节。
- 实际应用中,中断入口函数名称不要写错,有些中断的入口函数名称比较特殊,详情可看本章的2.2小节。
33.2 定时器中断的驱动设计
定时器中断的实现相对比较简单,仅需一个函数即可实现TIM1-TIM17定时器的中断更新配置。
33.2.1 定时器中断初始化
实现代码如下:
1. /* 2. ****************************************************************************************************** 3. * 函 数 名: bsp_RCC_TIM_Enable 4. * 功能说明: 使能TIM RCC 时钟 5. * 形 参: 无 6. * 返 回 值: 无 7. ****************************************************************************************************** 8. */ 9. void bsp_RCC_TIM_Enable(TIM_TypeDef* TIMx) 10. { 11. if (TIMx == TIM1) __HAL_RCC_TIM1_CLK_ENABLE(); 12. else if (TIMx == TIM2) __HAL_RCC_TIM2_CLK_ENABLE(); 13. else if (TIMx == TIM3) __HAL_RCC_TIM3_CLK_ENABLE(); 14. else if (TIMx == TIM4) __HAL_RCC_TIM4_CLK_ENABLE(); 15. else if (TIMx == TIM5) __HAL_RCC_TIM5_CLK_ENABLE(); 16. else if (TIMx == TIM6) __HAL_RCC_TIM6_CLK_ENABLE(); 17. else if (TIMx == TIM7) __HAL_RCC_TIM7_CLK_ENABLE(); 18. else if (TIMx == TIM8) __HAL_RCC_TIM8_CLK_ENABLE(); 19. // else if (TIMx == TIM9) __HAL_RCC_TIM9_CLK_ENABLE(); 20. // else if (TIMx == TIM10) __HAL_RCC_TIM10_CLK_ENABLE(); 21. // else if (TIMx == TIM11) __HAL_RCC_TIM11_CLK_ENABLE(); 22. else if (TIMx == TIM12) __HAL_RCC_TIM12_CLK_ENABLE(); 23. else if (TIMx == TIM13) __HAL_RCC_TIM13_CLK_ENABLE(); 24. else if (TIMx == TIM14) __HAL_RCC_TIM14_CLK_ENABLE(); 25. else if (TIMx == TIM15) __HAL_RCC_TIM15_CLK_ENABLE(); 26. else if (TIMx == TIM16) __HAL_RCC_TIM16_CLK_ENABLE(); 27. else if (TIMx == TIM17) __HAL_RCC_TIM17_CLK_ENABLE(); 28. else 29. { 30. Error_Handler(__FILE__, __LINE__); 31. } 32. } 33. 34. /* 35. ****************************************************************************************************** 36. * 函 数 名: bsp_SetTIMforInt 37. * 功能说明: 配置TIM和NVIC,用于简单的定时中断,开启定时中断。另外注意中断服务程序需要由用户应 38. * 用程序实现。 39. * 形 参: TIMx : 定时器 40. * _ulFreq : 定时频率 (Hz)。 0 表示关闭。 41. * _PreemptionPriority : 抢占优先级 42. * _SubPriority : 子优先级 43. * 返 回 值: 无 44. ****************************************************************************************************** 45. */ 46. void bsp_SetTIMforInt(TIM_TypeDef* TIMx, uint32_t _ulFreq, uint8_t _PreemptionPriority, 47. uint8_t _SubPriority) 48. { 49. TIM_HandleTypeDef TimHandle = {0}; 50. uint16_t usPeriod; 51. uint16_t usPrescaler; 52. uint32_t uiTIMxCLK; 53. 54. /* 使能TIM时钟 */ 55. bsp_RCC_TIM_Enable(TIMx); 56. 57. /*----------------------------------------------------------------------- 58. bsp.c 文件中 void SystemClock_Config(void) 函数对时钟的配置如下: 59. 60. System Clock source = PLL (HSE) 61. SYSCLK(Hz) = 400000000 (CPU Clock) 62. HCLK(Hz) = 200000000 (AXI and AHBs Clock) 63. AHB Prescaler = 2 64. D1 APB3 Prescaler = 2 (APB3 Clock 100MHz) 65. D2 APB1 Prescaler = 2 (APB1 Clock 100MHz) 66. D2 APB2 Prescaler = 2 (APB2 Clock 100MHz) 67. D3 APB4 Prescaler = 2 (APB4 Clock 100MHz) 68. 69. 因为APB1 prescaler != 1, 所以 APB1上的TIMxCLK = APB1 x 2 = 200MHz; 70. 因为APB2 prescaler != 1, 所以 APB2上的TIMxCLK = APB2 x 2 = 200MHz; 71. APB4上面的TIMxCLK没有分频,所以就是100MHz; 72. 73. APB1 定时器有 TIM2, TIM3 ,TIM4, TIM5, TIM6, TIM7, TIM12, TIM13, TIM14,LPTIM1 74. APB2 定时器有 TIM1, TIM8 , TIM15, TIM16,TIM17 75. 76. APB4 定时器有 LPTIM2,LPTIM3,LPTIM4,LPTIM5 77. ----------------------------------------------------------------------- */ 78. if ((TIMx == TIM1) || (TIMx == TIM8) || (TIMx == TIM15) || (TIMx == TIM16) || (TIMx == TIM17)) 79. { 80. /* APB2 定时器时钟 = 200M */ 81. uiTIMxCLK = SystemCoreClock / 2; 82. } 83. else 84. { 85. /* APB1 定时器 = 200M */ 86. uiTIMxCLK = SystemCoreClock / 2; 87. } 88. 89. if (_ulFreq < 100) 90. { 91. usPrescaler = 10000 - 1; /* 分频比 = 10000 */ 92. usPeriod = (uiTIMxCLK / 10000) / _ulFreq - 1; /* 自动重装的值 */ 93. } 94. else if (_ulFreq < 3000) 95. { 96. usPrescaler = 100 - 1; /* 分频比 = 100 */ 97. usPeriod = (uiTIMxCLK / 100) / _ulFreq - 1; /* 自动重装的值 */ 98. } 99. else /* 大于4K的频率,无需分频 */ 100. { 101. usPrescaler = 0; /* 分频比 = 1 */ 102. usPeriod = uiTIMxCLK / _ulFreq - 1; /* 自动重装的值 */ 103. } 104. 105. /* 106. 定时器中断更新周期 = TIMxCLK / usPrescaler + 1)/usPeriod + 1) 107. */ 108. TimHandle.Instance = TIMx; 109. TimHandle.Init.Prescaler = usPrescaler; 110. TimHandle.Init.Period = usPeriod; 111. TimHandle.Init.ClockDivision = 0; 112. TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP; 113. TimHandle.Init.RepetitionCounter = 0; 114. TimHandle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE; 115. if (HAL_TIM_Base_Init(&TimHandle) != HAL_OK) 116. { 117. Error_Handler(__FILE__, __LINE__); 118. } 119. 120. /* 使能定时器中断 */ 121. __HAL_TIM_ENABLE_IT(&TimHandle, TIM_IT_UPDATE); 122. 123. 124. /* 配置TIM定时更新中断 (Update) */ 125. { 126. uint8_t irq = 0; /* 中断号, 定义在 stm32h7xx.h */ 127. 128. if (TIMx == TIM1) irq = TIM1_UP_IRQn; 129. else if (TIMx == TIM2) irq = TIM2_IRQn; 130. else if (TIMx == TIM3) irq = TIM3_IRQn; 131. else if (TIMx == TIM4) irq = TIM4_IRQn; 132. else if (TIMx == TIM5) irq = TIM5_IRQn; 133. else if (TIMx == TIM6) irq = TIM6_DAC_IRQn; 134. else if (TIMx == TIM7) irq = TIM7_IRQn; 135. else if (TIMx == TIM8) irq = TIM8_UP_TIM13_IRQn; 136. else if (TIMx == TIM12) irq = TIM8_BRK_TIM12_IRQn; 137. else if (TIMx == TIM13) irq = TIM8_UP_TIM13_IRQn; 138. else if (TIMx == TIM14) irq = TIM8_TRG_COM_TIM14_IRQn; 139. else if (TIMx == TIM15) irq = TIM15_IRQn; 140. else if (TIMx == TIM16) irq = TIM16_IRQn; 141. else if (TIMx == TIM16) irq = TIM17_IRQn; 142. else 143. { 144. Error_Handler(__FILE__, __LINE__); 145. } 146. HAL_NVIC_SetPriority((IRQn_Type)irq, _PreemptionPriority, _SubPriority); 147. HAL_NVIC_EnableIRQ((IRQn_Type)irq); 148. } 149. 150. HAL_TIM_Base_Start(&TimHandle); 151. }
程序中的注释已经比较详细,这里把几个关键的地方再阐释下:
- 第9- 32行,函数bsp_RCC_TIM_Enable用于获取要使能的定时器时钟。
- 第49行,HAL库的定时器句柄变量要初始化为0,这个问题在教程上一章的4.1小节有专门说明。
- 第78 – 103行,计算出要配置的分频和周期。这里要注意一点,因为除了TIM2和TIM5,其它定时器都是16位的,相关寄存器大部分也都是16位的,配置的时候不可以超出0 -65535。这里分频变量usPrescaler和周期变量usPeriod统一按照16位计算,所以有了这几行代码做频率区分,防止超出范围。
- 第108 – 118行,通过函数HAL_TIM_Base_Init初始化定时器的基本功能。
- 第125 – 148行,配置定时器中断的优先级,并使能中断。
33.2.2 定时器中断服务程序
定时器初始化完毕了,定时器中断服务程序不要忘了写。比如使用定时器6的中断。
/* ********************************************************************************************************* * 函 数 名: TIM6_DAC_IRQHandler * 功能说明: TIM6定时中断服务程序 * 返 回 值: 无 ********************************************************************************************************* */ void TIM6_DAC_IRQHandler(void) { if((TIM6->SR & TIM_FLAG_UPDATE) != RESET) { /* 清除标志 */ TIM6->SR = ~ TIM_FLAG_UPDATE; /* 添加用户程序 */ } }
使用定时器中断不要把中断入口函数的名字写错了,比如这个定时器6,很容易错搞成TIM6__IRQHandler。
TIM1 – TIM17中断入口名如下(在startup_stm32h743xx.s文件里面有弱定义):
TIM1_BRK_IRQHandler TIM1_UP_IRQHandler TIM1_TRG_COM_IRQHandler TIM1_CC_IRQHandler TIM2_IRQHandler TIM3_IRQHandler TIM4_IRQHandler TIM5_IRQHandler TIM6_DAC_IRQHandler TIM7_IRQHandler TIM8_BRK_TIM12_IRQHandler /* 注意这里是TIM8 BRK和TIM12公用 */ TIM8_UP_TIM13_IRQHandler /* 注意这里是TIM8 UP和TIM13公用 */ TIM8_TRG_COM_TIM14_IRQHandler /* 注意这里是TIM8 TRG COM和TIM14公用 */ TIM8_CC_IRQHandler TIM15_IRQHandler TIM16_IRQHandler TIM17_IRQHandler
33.2.3 定时器中断的最高频率
有时候我们希望定时器的中断服务程序执行频率越快越好,这样可以方便的在中断里面执行一些特定功能,比如控制引脚输出指定个数的IO脉冲,使用定时器中断就可以方便的实现。
测试时开启MDK的最高等级优化和时间优化。
测试下面情况下,性能没差别:
- 程序在Flash运行,变量在DTCM,开启Cache。
- 程序和变量都在DTCM运行。
中断部分的测试程序:
/* ********************************************************************************************************* * 函 数 名: TIM6_DAC_IRQHandler * 功能说明: TIM6定时中断服务程序 * 返 回 值: 无 ********************************************************************************************************* */ void TIM6_DAC_IRQHandler(void) { TIM6->SR = ~TIM_FLAG_UPDATE; //GPIOB->ODR ^= GPIO_PIN_1; /* 使用通用GPIO */ HC574_TogglePin(GPIO_PIN_23); /* 使用的FMC扩展IO */ }
测试结果是STM32H7的进出中断的速度能跑到12.5MHz,所有程序在TCM和Flash运行没差别。
IO翻转10MHz,方波频率5MHz:

IO翻转12.5MHz,方波频率6.25MHz:
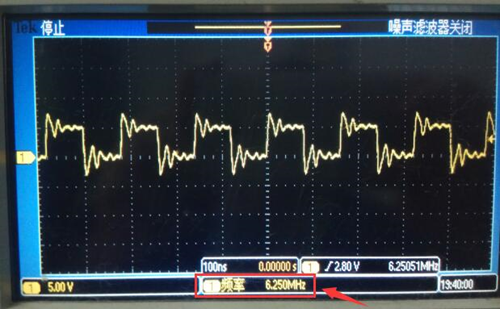
12.5Hz是最高频率,实际应用中别跑这么高,因为这个频率下,程序基本一直在执行中断服务程序。实际应用做个1MHz及其以下还是没问题的。
33.3 定时器板级支持包(bsp_tim_pwm.c)
定时器驱动文件bsp_tim_pwm.c主要实现了如下两个API供用户调用:
- bsp_SetTIMOutPWM
- bsp_SetTIMforInt
这两个函数都是TIM1-TIM17所有定时器都支持,函数bsp_SetTIMOutPWM用于PWM,下个章节为大家讲解,本小节主要把函数bsp_SetTIMforInt做个说明。
33.3.1 函数bsp_SetTIMforInt
函数原型:
void bsp_SetTIMforInt(TIM_TypeDef* TIMx, uint32_t _ulFreq, uint8_t _PreemptionPriority, uint8_t _SubPriority)
函数描述:
此函数主要用配置定时器周期性中断。
函数参数:
- 第1个参数用于指定使用那个定时器,参数可以是TIM1 – TIM17所有定时器(不含TIM9,TIM10和TIM11,因为STM32H7不支持这三个定时器)。
- 第2个参数是要实现的定时器中断频率,单位Hz,如果填0的话,表示关闭。
- 第3个参数是定时器抢占式优先级,范围0 – 15。
- 第4个参数是定时器子优先级,范围0 – 15。
注意事项:
- 定时器中断频率最好别超过10MHz,本章2.3小节有说明。
- 初始化后,别忘了写对应的中断服务程序。
使用举例:
比如使用定时器6设置为20Hz频率, 周期0.05秒定时中断:
bsp_SetTIMforInt(TIM6, 20, 2, 0);
33.4 定时器驱动移植和使用
定时器的移植比较简单:
- 第1步:复制bsp_tim_pwm.c和bsp_tim_pwm.h到自己的工程目录,并添加到工程里面。
- 第2步:这几个驱动文件主要用到HAL库的GPIO和TIM驱动文件,简单省事些可以添加所有HAL库.C源文件进来。
- 第3步:应用方法看本章节配套例子即可。
33.5 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:

第1阶段,上电启动阶段:
- 这部分在第14章进行了详细说明。
第2阶段,进入main函数:
- 第1步,硬件初始化,主要是MPU,Cache,HAL库,系统时钟,滴答定时器,LED和串口。
- 第2步,按键应用程序设计部分。
- 定时器中断服务程序里面实现翻转LED4和FMC扩展引脚23。
33.6 实验例程说明(MDK)
配套例子:
V7-018_定时器周期性中断(驱动支持TIM1-TIM17)
实验目的:
- 学习定时器周期性中断实现,支持TIM1-TIM17所有定时器。
实验内容:
- 系统上电后驱动了1个软件定时器,每100ms翻转一次LED2,同时启动1个TIM6周期性中断,每50ms执行一次,在中断服务程序里面翻转LED4和FMC扩展引脚23。
- STM32H7支持TIM1-TIM8,TIM12-TIM17共14个定时器,而中间的TIM9,TIM10,TIM11是不存在的。
- STM32H7的进出中断的速度能跑到12.5MHz,所有程序在TCM和Flash运行没差别,实际应用中最好别超过1MHz。
- 中断入口函数名称不要写错,有些中断的入口函数名称比较特殊,详情可看V7开发板用户手册。
实验操作:
- K1按键按下,开启TIM6的周期性中断。
- K2按键按下,关闭TIM6的周期性中断。
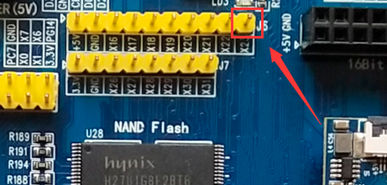
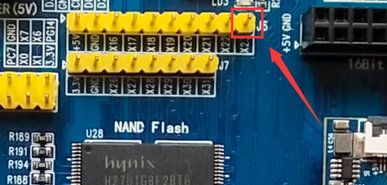
FMC扩展引脚23的位置:
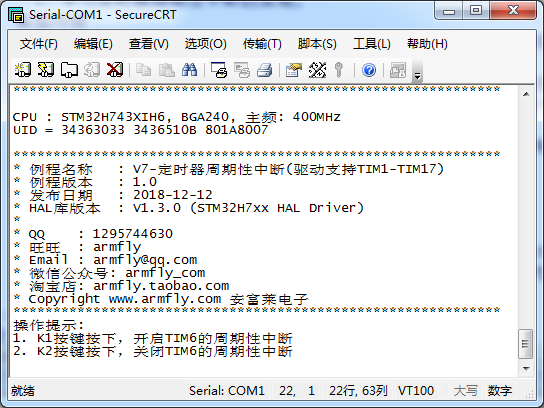
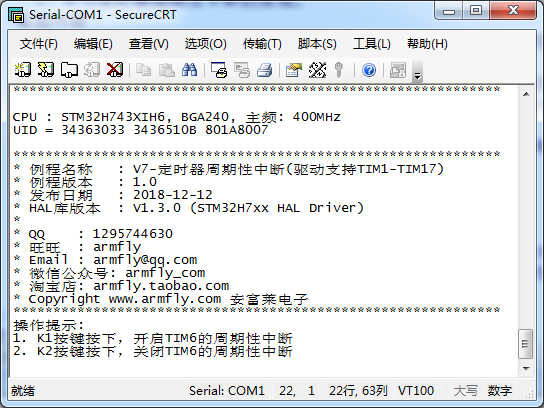
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
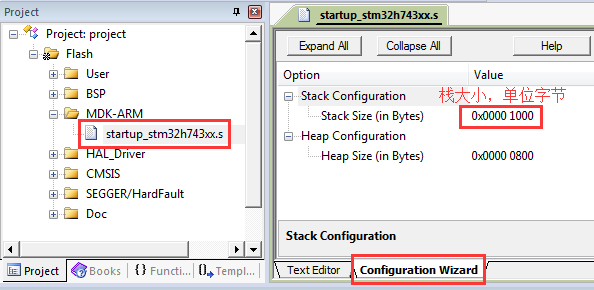
系统栈大小分配:
RAM空间用的DTCM:
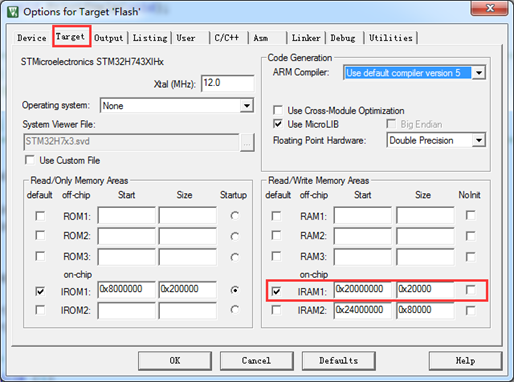
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* 配置MPU */ MPU_Config(); /* 使能L1 Cache */ CPU_CACHE_Enable(); /* STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到400MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */ bsp_InitLed(); /* 初始化LED */ }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
/* ********************************************************************************************************* * 函 数 名: MPU_Config * 功能说明: 配置MPU * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void MPU_Config( void ) { MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */ HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x24000000; MPU_InitStruct.Size = MPU_REGION_SIZE_512KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER0; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x60000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER1; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */ HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT); } /* ********************************************************************************************************* * 函 数 名: CPU_CACHE_Enable * 功能说明: 使能L1 Cache * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void CPU_CACHE_Enable(void) { /* 使能 I-Cache */ SCB_EnableICache(); /* 使能 D-Cache */ SCB_EnableDCache(); }
定时器中断服务程序:
定时器6的中断服务程序如下,主要实现了LED4翻转和FMC扩展引脚23的翻转:
/* ********************************************************************************************************* * 函 数 名: TIM6_DAC_IRQHandler * 功能说明: TIM6定时中断服务程序 * 返 回 值: 无 ********************************************************************************************************* */ void TIM6_DAC_IRQHandler(void) { if((TIM6->SR & TIM_FLAG_UPDATE) != RESET) { /* 清除更新标志 */ TIM6->SR = ~ TIM_FLAG_UPDATE; /* 翻转LED4和FMC扩展引脚23 */ bsp_LedToggle(4); HC574_TogglePin(GPIO_PIN_23); } }
主功能:
主程序实现如下操作:
- K1按键按下,开启TIM6的周期性中断。
- K2按键按下,关闭TIM6的周期性中断。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ bsp_SetTIMforInt(TIM6, 20, 2, 0); /* 设置为20Hz频率, 周期0.05秒定时中断*/ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔50ms 进来一次 */ bsp_LedToggle(2); } /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */ ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下 */ TIM6->DIER |= TIM_IT_UPDATE; break; case KEY_DOWN_K2: /* K2键按下 */ TIM6->DIER &= ~TIM_IT_UPDATE; break; default: /* 其它的键值不处理 */ break; } } } }
33.7 实验例程说明(IAR)
配套例子:
V7-018_定时器周期性中断(驱动支持TIM1-TIM17)
实验目的:
- 学习定时器周期性中断实现,支持TIM1-TIM17所有定时器。
实验内容:
- 系统上电后驱动了1个软件定时器,每100ms翻转一次LED2,同时启动1个TIM6周期性中断,每50ms执行一次,在中断服务程序里面翻转LED4和FMC扩展引脚23。
- STM32H7支持TIM1-TIM8,TIM12-TIM17共14个定时器,而中间的TIM9,TIM10,TIM11是不存在的。
- STM32H7的进出中断的速度能跑到12.5MHz,所有程序在TCM和Flash运行没差别,实际应用中最好别超过1MHz。
- 中断入口函数名称不要写错,有些中断的入口函数名称比较特殊,详情可看V7开发板用户手册。
实验操作:
- K1按键按下,开启TIM6的周期性中断。
- K2按键按下,关闭TIM6的周期性中断。
FMC扩展引脚23的位置:
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
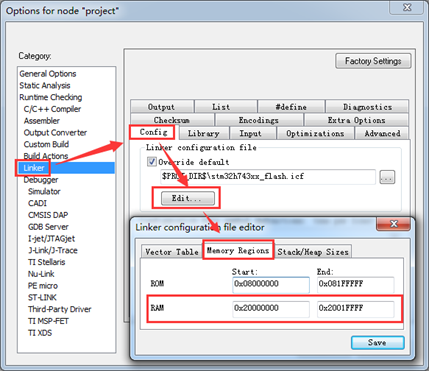
系统栈大小分配:

RAM空间用的DTCM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* 配置MPU */ MPU_Config(); /* 使能L1 Cache */ CPU_CACHE_Enable(); /* STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到400MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */ bsp_InitLed(); /* 初始化LED */ }
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
/* ********************************************************************************************************* * 函 数 名: MPU_Config * 功能说明: 配置MPU * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void MPU_Config( void ) { MPU_Region_InitTypeDef MPU_InitStruct; /* 禁止 MPU */ HAL_MPU_Disable(); /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x24000000; MPU_InitStruct.Size = MPU_REGION_SIZE_512KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER0; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x60000000; MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER1; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /*使能 MPU */ HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT); } /* ********************************************************************************************************* * 函 数 名: CPU_CACHE_Enable * 功能说明: 使能L1 Cache * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ static void CPU_CACHE_Enable(void) { /* 使能 I-Cache */ SCB_EnableICache(); /* 使能 D-Cache */ SCB_EnableDCache(); }
定时器中断服务程序:
定时器6的中断服务程序如下,主要实现了LED4翻转和FMC扩展引脚23的翻转:
/* ********************************************************************************************************* * 函 数 名: TIM6_DAC_IRQHandler * 功能说明: TIM6定时中断服务程序 * 返 回 值: 无 ********************************************************************************************************* */ void TIM6_DAC_IRQHandler(void) { if((TIM6->SR & TIM_FLAG_UPDATE) != RESET) { /* 清除更新标志 */ TIM6->SR = ~ TIM_FLAG_UPDATE; /* 翻转LED4和FMC扩展引脚23 */ bsp_LedToggle(4); HC574_TogglePin(GPIO_PIN_23); } }
主功能:
主程序实现如下操作:
- K1按键按下,开启TIM6的周期性中断。
- K2按键按下,关闭TIM6的周期性中断。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { uint8_t ucKeyCode; /* 按键代码 */ bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ PrintfHelp(); /* 打印操作提示 */ bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ bsp_SetTIMforInt(TIM6, 20, 2, 0); /* 设置为20Hz频率, 周期0.05秒定时中断*/ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔50ms 进来一次 */ bsp_LedToggle(2); } /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */ ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下 */ TIM6->DIER |= TIM_IT_UPDATE; break; case KEY_DOWN_K2: /* K2键按下 */ TIM6->DIER &= ~TIM_IT_UPDATE; break; default: /* 其它的键值不处理 */ break; } } } }
33.8 总结
本章节就为大家讲解这么多,相对比较容易掌握,望初学者熟练运用。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号