【FPGA学习】- MIO控制LED实验
实验:对MIO操作点亮PS端LED灯
硬件工作
与《SDK实验篇("Hello World")》中硬件工作相同,不再叙述。
软件工作
点击“launch SDK”,新建一个模板为“hello world”的C语言工程。参考官方给出的模板代码,进行编码工作。
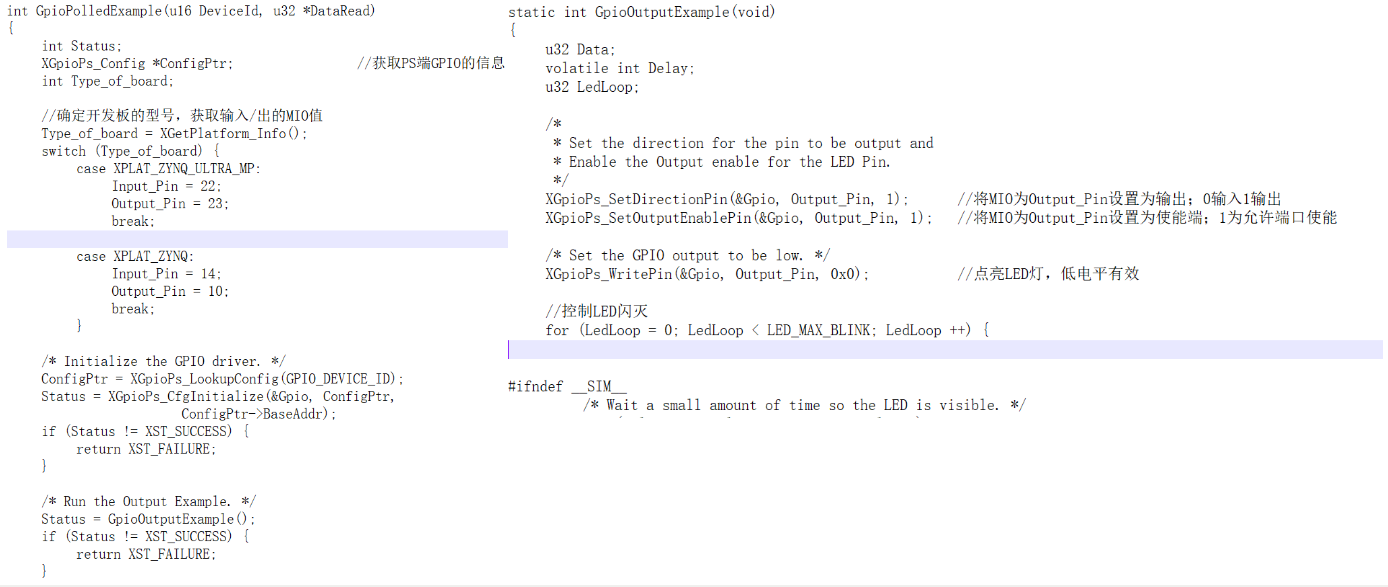
在“system.mss”中导入参考代码gpiops。首先,分析代码。主代码中的流程为获取输入/输出MIO值,初始化GPIO,运行输出代码。输出代码中设置输出端口,使能输出端口,之后点亮LED灯并控制其闪灭。
所以,基于以上代码流程,进行修改代码。代码执行流程如下。

通过查阅相关的开发文档,我们知道在该开发板上PS端的LED的MIO为0和13,所以在代码中不需要获取MIO值。

实现代码。
/***************************** Include Files ********************************/ #include "xparameters.h" #include "platform.h" #include "xgpiops.h" #include "xstatus.h" #include "xplatform_info.h" #include <xil_printf.h> #include "sleep.h" /************************** Constant Definitions ****************************/ #define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID #define printf xil_printf /* Smalller foot-print printf */ /************************** Variable Definitions **************************/ XGpioPs Gpio; /* The driver instance for GPIO Device. */ /****************************** Main Function *****************************/ int main(void){ init_platform(); //通过调用init_platform函数配置定时器和建立中断以初始化平台 int Status; XGpioPs_Config *ConfigPtr; printf("MIO LED test: \n\r"); /* Initialize the GPIO driver. */ ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID); Status = XGpioPs_CfgInitialize(&Gpio, ConfigPtr, ConfigPtr->BaseAddr); if (Status != XST_SUCCESS) { return XST_FAILURE; } /* * Set the direction for the pin to be output and * Enable the Output enable for the LED Pin. */ XGpioPs_SetDirectionPin(&Gpio, 0, 1); XGpioPs_SetDirectionPin(&Gpio, 13, 1); XGpioPs_SetOutputEnablePin(&Gpio, 0, 1); XGpioPs_SetOutputEnablePin(&Gpio, 13, 1);
//通过循环函数和sleep函数实现LED灯的闪灭控制。 while(1){ /* Set the GPIO output to be low. */ XGpioPs_WritePin(&Gpio, 0, 0x0); XGpioPs_WritePin(&Gpio, 13, 0x0); sleep(1); /* Set the GPIO output to be high. */ XGpioPs_WritePin(&Gpio, 0, 0x1); XGpioPs_WritePin(&Gpio, 13, 0x1); sleep(1); } cleanup_platform(); return 0; }
实验结果。
实验:MIO通过按键来控制PS端LED灯的闪灭。
硬件工作
与《SDK实验篇("Hello World")》中硬件工作相同,不再叙述。
软件工作
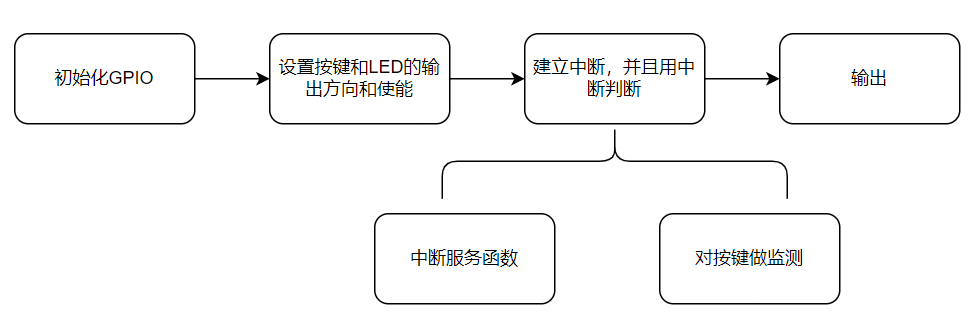
本次实验基于中断实验和MIO控制LED实验。基本的流程大致如下。
实现代码。
/***************************** Include Files ********************************/ #include "xparameters.h" #include "xgpiops.h" #include "xscugic.h" #include "xil_exception.h" #include "xplatform_info.h" #include <xil_printf.h> #include "sleep.h" /************************** Constant Definitions ****************************/ #define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID #define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID #define GPIO_INTERRUPT_ID XPAR_XGPIOPS_0_INTR #define printf xil_printf /* Smalller foot-print printf */ #define MIO_KEY 50 #define MIO_LED 0 /************************** Function Prototypes ******************************/ static void IntrHandler(void *CallBackRef); static int SetupInterruptSystem(XScuGic *Intc, XGpioPs *Gpio, u16 GpioIntrId); /************************** Variable Definitions *****************************/ static XGpioPs Gpio; /* The Instance of the GPIO Driver */ static XScuGic Intc; /* The Instance of the Interrupt Controller Driver */ static u32 Key_Press; static u32 Key_value; /*****************************************************************************/ /** * * Main function. * * @param None * * @return * - XST_SUCCESS if the example has completed successfully. * - XST_FAILURE if the example has failed. * * @note None * ******************************************************************************/ int main(void){ int Status; XGpioPs_Config *ConfigPtr; printf("GPIO Interrupt Test \r\n"); /* Initialize the GPIO driver. */ ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID); Status = XGpioPs_CfgInitialize(&Gpio, ConfigPtr, ConfigPtr->BaseAddr); if (Status != XST_SUCCESS) { return XST_FAILURE; } /* * Set the direction for the pin to be input */ XGpioPs_SetDirectionPin(&Gpio, MIO_KEY, 0); /* * Set the direction for the pin to be output and * Enable the Output enable for the LED Pin. */ XGpioPs_SetDirectionPin(&Gpio, MIO_LED, 1); XGpioPs_SetOutputEnablePin(&Gpio, MIO_LED, 1); /* Set the GPIO output to be low. */ XGpioPs_WritePin(&Gpio, MIO_LED, 0x0); /* * Setup the interrupts such that interrupt processing can occur. */ SetupInterruptSystem(&Intc, &Gpio, GPIO_INTERRUPT_ID); while(1){ if(Key_Press){ usleep(20000); if(XGpioPs_ReadPin(&Gpio, MIO_KEY) == 0){ Key_value = ~Key_value; XGpioPs_WritePin(&Gpio, MIO_LED, Key_value); } Key_Press = FALSE; XGpioPs_IntrClearPin(&Gpio, MIO_KEY); //清除按键 KEY 中断 XGpioPs_IntrEnablePin(&Gpio, MIO_KEY); //使能按键 KEY 中断 } } return XST_SUCCESS; } /****************************************************************************/ /** * This function is the user layer callback function for the interrupts of * the GPIO device. It checks if the key have been pressed to stop the * interrupt processing and exit from the project. * * @param CallBackRef is a pointer to the upper layer callback reference. * @param Status is the Interrupt status of the GPIO bank. * * @return None. * * @note None. * ******************************************************************************/ static void IntrHandler(void *CallBackRef) { XGpioPs *Gpio = (XGpioPs *)CallBackRef; /* Push the KEY */ if (XGpioPs_IntrGetStatusPin(Gpio, MIO_KEY)){ Key_Press = TRUE; XGpioPs_IntrDisablePin(Gpio, MIO_KEY); //屏蔽按键 KEY 中断 } } /*****************************************************************************/ /** * * This function sets up the interrupt system for the example. It enables falling * edge interrupts for all the pins of bank 0 in the GPIO device. * * @param GicInstancePtr is a pointer to the XScuGic driver Instance. * @param GpioInstancePtr contains a pointer to the instance of the GPIO * component which is going to be connected to the interrupt * controller. * @param GpioIntrId is the interrupt Id and is typically * XPAR_<GICPS>_<GPIOPS_instance>_VEC_ID value from * xparameters.h. * * @return XST_SUCCESS if successful, otherwise XST_FAILURE. * * @note None. * ****************************************************************************/ static int SetupInterruptSystem(XScuGic *GicInstancePtr, XGpioPs *Gpio, u16 GpioIntrId) { int Status; XScuGic_Config *IntcConfig; /* Instance of the interrupt controller */ Xil_ExceptionInit(); /* * Initialize the interrupt controller driver so that it is ready to * use. */ IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID); if (NULL == IntcConfig) { return XST_FAILURE; } Status = XScuGic_CfgInitialize(GicInstancePtr, IntcConfig, IntcConfig->CpuBaseAddress); if (Status != XST_SUCCESS) { return XST_FAILURE; } /* * Connect the interrupt controller interrupt handler to the hardware * interrupt handling logic in the processor. */ Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT, (Xil_ExceptionHandler)XScuGic_InterruptHandler, GicInstancePtr); /* * Connect the device driver handler that will be called when an * interrupt for the device occurs, the handler defined above performs * the specific interrupt processing for the device. */ Status = XScuGic_Connect(GicInstancePtr, GpioIntrId, (Xil_ExceptionHandler)IntrHandler, (void *)Gpio); if (Status != XST_SUCCESS) { return Status; } /* Enable the interrupt for the GPIO device. */ XScuGic_Enable(GicInstancePtr, GpioIntrId); XGpioPs_SetIntrTypePin(Gpio, MIO_KEY, XGPIOPS_IRQ_TYPE_EDGE_FALLING); XGpioPs_IntrEnablePin(Gpio, MIO_KEY); /* Enable interrupts in the Processor. */ Xil_ExceptionEnableMask(XIL_EXCEPTION_IRQ); return XST_SUCCESS; }
实验结果。
参考资料
[1] Zynq-7000 SoC Technical Reference Manual (UG585),https://docs.xilinx.com/v/u/en-US/ug585-Zynq-7000-TRM
[2] 黑金FPGA开发教程
[3] 正点原子FPGA开发教程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号