
python实现模糊操作
目录:
(一)模糊或平滑与滤波的介绍
(二)均值模糊
(1) 原理
(2)代码实现-----均值模糊函数blur()
(三)中值模糊------mediaBlur函数
(四)高斯模糊------GaussianBlur函数
(五)方框滤波------boxFliter函数
(六)双边滤波------bilateralFilter()函数
(七)自定义模糊filter2D
(1)介绍
(2)实现中值模糊
(3)实现锐化处理
(八)边缘保留滤波------EPF
(1)高斯双边
(2)均值迁移
正文:
(一)模糊或平滑或滤波的介绍
平滑 也称 模糊, 是一项简单且使用频率很高的图像处理方法。平滑处理的用途有很多, 但是在本教程中我们仅仅关注它减少噪声的功用。从滤波角度来讲,一般主要的目的都是为了实现对图像噪声的消除,增强图像的效果。
-
平滑处理时需要用到一个 滤波器 。 最常用的滤波器是 线性 滤波器,线性滤波处理的输出像素值 (i.e.
![g(i,j)]() ) 是输入像素值 (i.e.
) 是输入像素值 (i.e. ![f(i+k,j+l)]() )的加权和 :
)的加权和 :![g(i,j) = \sum_{k,l} f(i+k, j+l) h(k,l)]()
![h(k,l)]() 称为 核, 它仅仅是一个加权系数。
称为 核, 它仅仅是一个加权系数。不妨把 滤波器 想象成一个包含加权系数的窗口,当使用这个滤波器平滑处理图像时,就把这个窗口滑过图像。
-
滤波器的种类有很多, 这里仅仅提及最常用的。
 ) 是输入像素值 (i.e.
) 是输入像素值 (i.e.  )的加权和 :
)的加权和 :
 称为 核, 它仅仅是一个加权系数。
称为 核, 它仅仅是一个加权系数。(二)均值模糊
(1) 原理
-
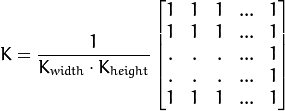
最简单的滤波器, 输出像素值是核窗口内像素值的 均值 ( 所有像素加权系数相等)
-
核如下:
![K = \dfrac{1}{K_{width} \cdot K_{height}} \begin{bmatrix} 1 & 1 & 1 & ... & 1 \\ 1 & 1 & 1 & ... & 1 \\ . & . & . & ... & 1 \\ . & . & . & ... & 1 \\ 1 & 1 & 1 & ... & 1 \end{bmatrix}]()
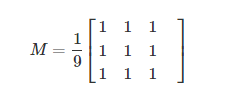
比如一个3*3的模板其实就可以如下表示:
(2)代码实现-----均值模糊函数blur()
均值模糊函数blur(),定义:blur(src,ksize,dst=None, anchor=None, borderType=None)。定义是有5个参数,但最后三个均为none,所以也就2个参数
src:要处理的原图像,ksize: 周围关联的像素的范围。
def blur_demo(image): #均值模糊 dst = cv.blur(image,(3,3)) #ksize是卷积核大小3行3列,列数越大模糊越大 cv.imshow("blur_demo",dst)
(三)中值模糊------mediaBlur函数
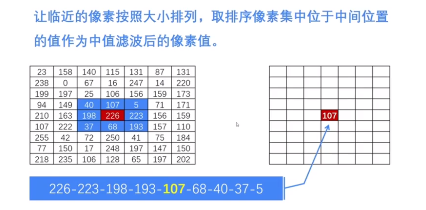
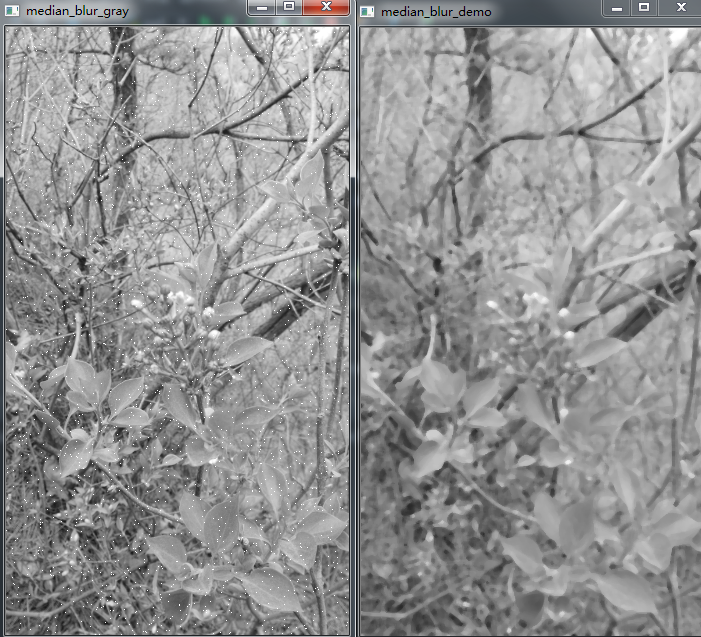
中值滤波模板就是用卷积框中像素的中值代替中心值,达到去噪声的目的。这个模板一般用于去除椒盐噪声。中值滤波对于这些白点噪声的去除是非常的好的。
前面的滤波器都是用计算得到的一个新值来取代中心像素的值,而中值滤波是用中心像素周围(也可以使他本身)的值来取代他,卷积核的大小也是个奇数。
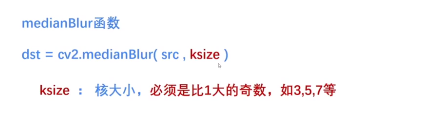
中值模糊函数medianBlur(): 定义:medianBlur(src, ksize, dst=None)。ksize与blur()函数不同,不是矩阵,而是一个数字,例如为5,就表示了5*5方阵
1 def median_blur_demo(image): #中值模糊,对于椒盐噪声的去噪效果好,去掉图片中的一些黑点等 2 gray = cv.cvtColor(image,cv.COLOR_BGR2GRAY) 3 for i in range(2000): # 添加点噪声,白色 4 temp_x = np.random.randint(0, gray.shape[0]) 5 temp_y = np.random.randint(0, gray.shape[1]) 6 gray[temp_x][temp_y] = 255 7 8 cv.imshow("median_blur_gray", gray) 9 dst = cv.medianBlur(gray,5) #ksize是卷积核大小1行3列,列数越大模糊越大 10 cv.imshow("median_blur_demo",dst)
(四)高斯模糊------GaussianBlur函数
https://www.cnblogs.com/april0315/p/13593743.html
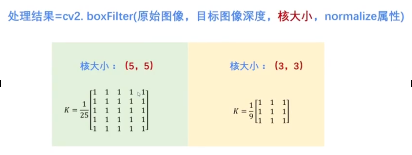
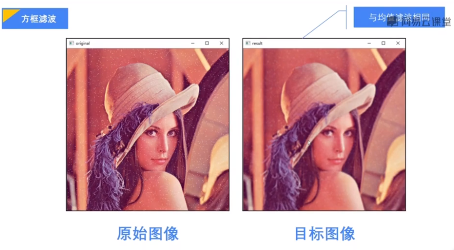
(五)方框滤波
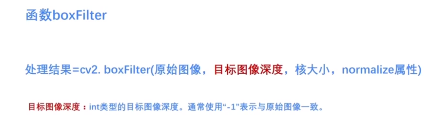
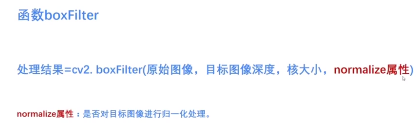
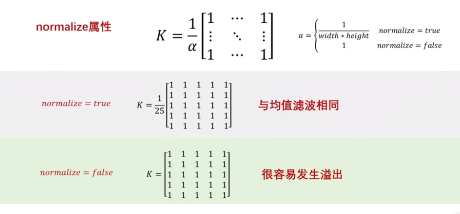
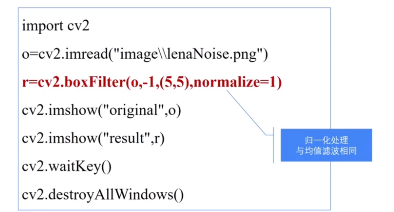 默认是归一化处理的,也就是normalize没有这个参数时
默认是归一化处理的,也就是normalize没有这个参数时
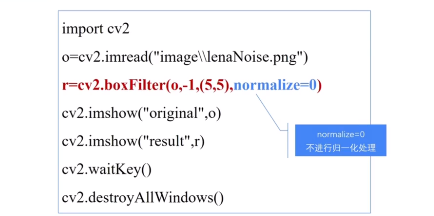 5*5核很容易发生溢出(每个像素点的值都保留在255),最后图片为白色,2*2的核可能不会。
5*5核很容易发生溢出(每个像素点的值都保留在255),最后图片为白色,2*2的核可能不会。
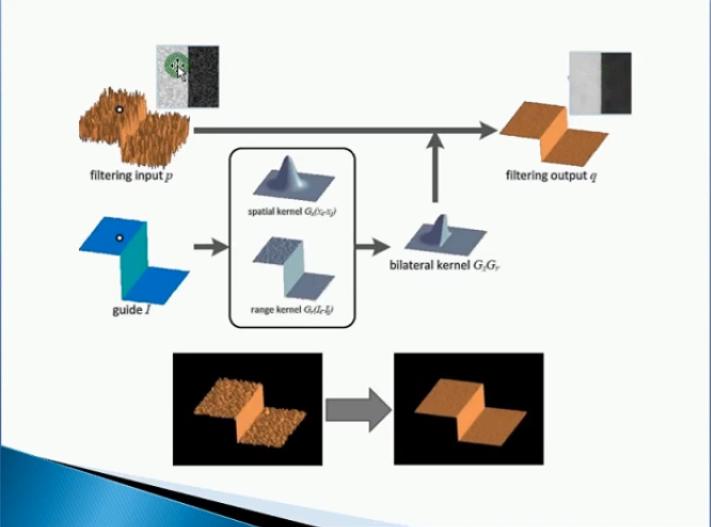
(六)双边滤波------bilateralFilter()函数
定义:bilateralFilter(src, d, sigmaColor, sigmaSpace, dst=None, borderType=None)
d:邻域直径
sigmaColor:颜色标准差
sigmaSpace:空间标准差
1 src2 = cv.bilateralFilter(src1, 5, 5, 2) 2 cv.imshow("双边滤波", src2)
(七)自定义模糊filter2D(上面是封装在2D滤波器之上)
(1)介绍
Opencv提供的一个通用的2D滤波函数为cv2.filter2D(),
滤波函数的使用需要一个核模板,对图像的滤波操作过程为:将和模板放在图像的一个像素A上,求与之对应的图像上的每个像素点的和,
核不同,得到的结果不同,而滤波的使用核心也是对于这个核模板的使用,需要注意的是,该滤波函数是单通道运算的,
也就是说对于彩色图像的滤波,需要将彩色图像的各个通道提取出来,对各个通道分别滤波才行。
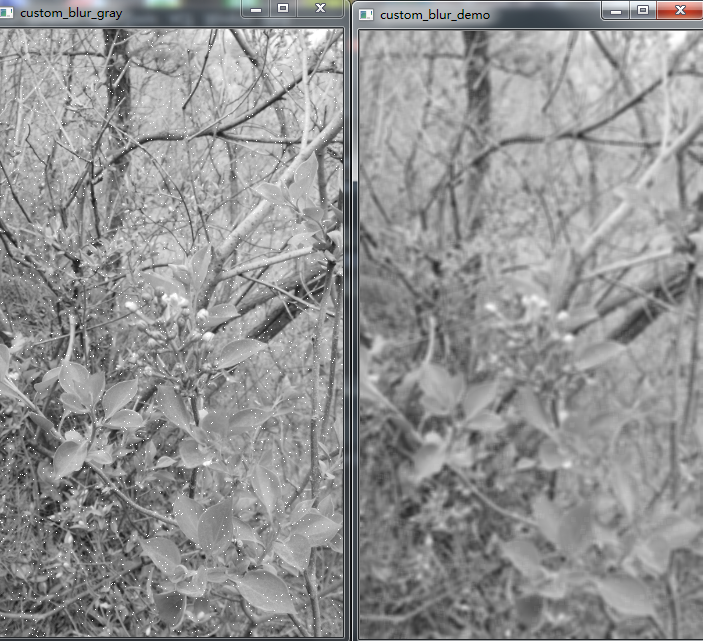
(2)实现中值模糊
1 def custom_blur_demo(image): #自定义模糊 2 kernel = np.ones([5,5],np.float32)/25 #声明二维数组5*5,初始化1,保证值不溢出,除以数组大小,实现中值模糊 自定义卷积核的算子 3 dst = cv.filter2D(image,-1,kernel) 4 cv.imshow("custom_blur_demo",dst)
上述生成的5*5核模板其实就是一个均值滤波。,当我们是/25就是中值滤波,归一化处理
(3)实现锐化处理
1 def custom_blur_demo(image): #自定义模糊 2 kernel = np.array([[0,-1,0],[-1,5,-1],[0,-1,0]],np.float32) #实现锐化处理,提高图像的对比度,提高立体感,轮廓更加清晰 3 dst = cv.filter2D(image,-1,kernel) 4 cv.imshow("custom_blur_demo",dst)

(八)边缘保留滤波------EPF
opencv实现EPF有两种传统方法,高斯双边和均值迁移
(1)高斯双边
差异越大,越会完整保留
1 def bi_demo(image): 2 dst = cv.bilateralFilter(image,0,100,15) #第二个参数d是distinct,我们若是输入了d,会根据其去算第3或4个参数,我们最好是使用第3或4个参数反算d,先设为0 3 cv.imshow("bi_demo",dst) 4 5 src = cv.imread("./1.png") #读取图片 6 cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应 7 cv.imshow("input image",src) #通过名字将图像和窗口联系 8 bi_demo(src) 9 cv.waitKey(0) #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作 10 cv.destroyAllWindows() #销毁所有窗口

def bilateralFilter(src, d, sigmaColor, sigmaSpace, dst=None, borderType=None): # real signature unknown; restored from __doc__
d, sigmaColor, sigmaSpace-------0,越大,越小
值域和空域的两个方差sigma可以简单的设置为相等,小于10,无太大效果,大于150效果太强,像卡通片似的。
滤波器尺寸d:大于5将较慢(5 forreal-time),d=9,for off-lineapplications,d 是像素邻域“直径”。计算的半径,半径之内的像数都会被纳入计算,如果提供-1,会从后面的参数sigmaSpace中自动计算。
Sigma_color颜色空间过滤器的sigma值,这个参数的值越大,表明该像素邻域内有越宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
Sigma_space坐标空间中滤波器的sigma值,如果该值较大,则意味着颜色相近的较远的像素将相互影响,从而使更大的区域中足够相似的颜色获取相同的颜色。当d>0时,d指定了邻域大小且与sigmaSpace五官,否则d正比于sigmaSpace. 双边滤波的内在想法是:在图像的值域(range)上做传统滤波器在空域(domain)上做的工作。空域滤波对空间上邻近的点进行加权平均,加权系数随着距离的增加而减少;值域滤波则是对像素值相近的点进行加权平均,加权系数随着值差的增大而减少。
对于第三个参数:d来说一般来说,要想得到比较好的结果,3、4、5参数最好都指定。
第三个参数如果设定值大于5,那计算会很慢,所以一般设置都等于5,如果少数情况需要去除比较大的噪声,那么d=9。要取得较好的平滑效果,最好在9附近
d或者Sigma_space设置的越大,包含的范围越大,耗时越长
(2)均值迁移
def pyrMeanShiftFiltering(src, sp, sr, dst=None, maxLevel=None, termcrit=None): # real signature unknown; restored from __doc__
1 def shift_demo(image): 2 dst = cv.pyrMeanShiftFiltering(image,10,50) #第二个参数d是distinct,我们若是输入了d,会根据其去算第3或4个参数,我们最好是使用第3或4个参数反算d,先设为0 3 cv.imshow("shift_demo",dst)
第一个参数src,输入图像,8位,三通道的彩色图像,并不要求必须是RGB格式,HSV、YUV等Opencv中的彩色图像格式均可;
第二个参数sp,定义的漂移物理空间半径大小; #越大,细节丢失越多
第三个参数sr,定义的漂移色彩空间半径大小;
第四个参数dst,输出图像,跟输入src有同样的大小和数据格式;
第五个参数maxLevel,定义金字塔的最大层数;
第六个参数termcrit,定义的漂移迭代终止条件,可以设置为迭代次数满足终止,迭代目标与中心点偏差满足终止,或者两者的结合;
参考:
https://www.cnblogs.com/ssyfj/p/9267648.html
https://blog.csdn.net/u011321546/article/details/79578029

 浙公网安备 33010602011771号
浙公网安备 33010602011771号