一步步学习操作系统(1)——参照ucos,在STM32上实现一个简单的多任务(“啰里啰嗦版”)
2015-04-06 21:42 Ansersion 阅读(11710) 评论(0) 收藏 举报该篇为“啰里啰嗦版”,另有相应的“精简版”供参考
“不到长城非好汉;不做OS,枉为程序员”
OS之于程序员,如同梵蒂冈之于天主教徒,那永远都是块神圣的领土。若今生不能亲历之,实乃憾事!
但是,圣域不是想进就能进的呀……
OS融合了大量的计算机的基础知识,各个知识领域之间交织紧密,初来乍到者一不小心就会绕出个死结。
我的方法是:死结就死结,不管三七二十一,直接剪断,先走下去再说,回头我们再把这个剪断的死结再接上。
我们知道,“多任务”一般在介绍OS的书籍中,是属于中间或者靠后的部分,又或者分散在各个章节中。而我决定上手就说它。
一、整体纵览:
1、硬件:
STM32F103RC
2、IDE:
MDK5
3、文件架构:
(1)标准文件:
startup_stm32f10x_hd.s:STM32官方启动文件(注意:这是针对stm32硬件配置的文件,型号要是不同,你的可能和我不一样哦)
(2)自编文件——这才是我们的重头戏哦(共5个文件:1x".asm"+2x".c"+2x".h"):
main.c:主函数和任务定义;
os_cpu_a.asm:中断与任务切换;
myos.c:硬件初始化与任务切换时的堆栈保存;
include.h和myos.h:两个头文件。
二、逐文解析:
1、main.c
顺着main函数这条主线,我们看到最终的OS其实就是执行了7行代码,共5个函数:
1、OSInit();
2、OSTaskCreate(Task1, (void*)0, (OS_STK*)&Task1Stk[TASK_STACK_SIZE-1]);
3、OSTaskCreate(Task2, (void*)0, (OS_STK*)&Task2Stk[TASK_STACK_SIZE-1]);
4、OSTaskCreate(Task3, (void*)0, (OS_STK*)&Task3Stk[TASK_STACK_SIZE-1]);
5、SysTickInit(5);
6、LedInit();
7、OSStart();
简单说说main函数功能:
当OSStart()执行之后,Task1、Task2、Task3轮流执行,即Task1()、Task2()、Task3()三个函数轮流执行:
Task1()->Task2()->Task3()->Task1()->Task2()->Task3()->Task1()->......
每个任务(或函数)执行相等的时间片,并有SysTick中断来触发PendSV中断,从而实现任务切换。
OSStart()执行之后,永不返回。
各个函数基本做了些什么,代码后面都附加了注解。
其中需要注意的地方是:OSStart()。
这个函数一旦执行了就不会返还,有点像死循环(但不是死循环哦,后来会明白的)。
仔细想想后,确实也应当如此,如果main函数return掉了的话,程序也就结束啦!
“main函数结束”就意味着CPU现在只会喝喝茶、看看报了,什么抢劫、着火它都装作没看见。
main函数就这么短,那么上面七个函数的实现在哪里呢?
这时你肯定想到"#include"了吧!
“太好了!#include只有一行!”
那我们去include.h那里看看吧。
1 #include "include.h" 2 extern OS_TCB OSTCBTbl[OS_MAX_TASKS]; // (OS Task Control Block Table) 3 extern OS_STK TASK_IDLE_STK[TASK_STACK_SIZE]; //("TaskIdle" Stack) 4 extern OS_TCB *OSTCBCur; // Pointer to the current running task(OS Task Control Block Current) 5 extern OS_TCB *OSTCBNext; // Pointer to the next running task(OS Task Control Block Next) 6 extern INT8U OSTaskNext; // Index of the next task 7 extern INT32U TaskTickLeft; // Refer to the time ticks left for the current task 8 extern INT32U TimeMS; // For system time record 9 extern INT32U TaskTimeSlice; // For system time record 10 11 OS_STK Task1Stk[TASK_STACK_SIZE]; // initialize stack for task1 12 OS_STK Task2Stk[TASK_STACK_SIZE]; // initialize stack for task2 13 OS_STK Task3Stk[TASK_STACK_SIZE]; // initialize stack for task3 14 15 void Task1(void *p_arg); // flip the led1 every 0.5s 16 void Task2(void *p_arg); // flip the led2 every 1.0s 17 void Task3(void *p_arg); // do nothing 18 19 int main(void) 20 { 21 22 23 OSInit(); // OS initialization 24 OSTaskCreate(Task1, (void*)0, (OS_STK*)&Task1Stk[TASK_STACK_SIZE-1]); // create task 1 25 OSTaskCreate(Task2, (void*)0, (OS_STK*)&Task2Stk[TASK_STACK_SIZE-1]); // create task 2 26 OSTaskCreate(Task3, (void*)0, (OS_STK*)&Task3Stk[TASK_STACK_SIZE-1]); // create task 3 27 SysTickInit(5); // configure the SysTick as 5ms 28 LedInit(); // leds initialization 29 OSStart(); // start os! 30 31 return 0; // never come here 32 } 33 34 void Task1(void *p_arg) 35 { 36 while(1) { 37 delayMs(100); // delay 100 * 5ms = 0.5s 38 LED1TURN(); // flip the switch of led1 39 } 40 } 41 void Task2(void *p_arg) 42 { 43 while(1) { 44 delayMs(200); // delay 200 * 5ms = 1.0s 45 LED2TURN(); // flip the switch of led2 46 } 47 } 48 49 void Task3(void *p_arg) 50 { 51 while(1) { 52 } 53 }
小白兔笔记:
(1)“啥是extern变量啊?”
"快去复习复习c语言教程吧。"
(2)"OS_TCB、OS_MAX_TASKS什么的都是些啥?“
"myos.h"里都有它们的定义。
(3)”'OSTCBCur'都是些啥怪名字?"
“针对词义复杂的变量,注意看定义那行注释,后面的括号会有对变量的简短说明,如:
extern OS_TCB *OSTCBCur; // Pointer to the current running task(OS Task Control Block Current)
2、include.h
“我去!这不是欺骗我感情吗?main函数倒是1个#include,怎么到了这里却又来了三个!”
等等!先别灰心嘛,容我慢慢道来。
我们知道,main里的
#include "include.h"
其实就等于:
#include <stdlib.h>
#include "myos.h"
#include "stm32f10x.h"
但是我们为什么要那么费劲再弄一个"inlcude.h"文件呢?
假设我们想给这个OS再加个内存管理的功能,于是要添加几个".c"文件,而这些文件也要包含上面那几个"#include",那么我们不是要再把那几个“#include”都写一遍吗?
不过,有了这个include.h之后,这些".c"文件只要
#include "include.h"就可以了。
多加了1个"include.h",但却清爽了n个”xxxxx.c"文件。
当然,这只是好处之一,其他的就不多说了,毕竟我们的主题是OS嘛。
1 #ifndef INCLUDE_H 2 #define INCLUDE_H 3 4 #include <stdlib.h> 5 #include "myos.h" 6 #include "stm32f10x.h" //stm32官方头文件 7 8 #endif
小白兔笔记:
(1)“#ifndef INCLUDE_H之类的东西是什么意思?”
这是为了防止多重包含头文件。
既然你问了这个问题,估计你也听不懂啥是”多重包含头文件“。
这是和编译器有关的约定,简单点说,不这么写,编译器”可能“——我说”可能“——找你茬。
(2)”stm32f10x.h“是官方根据stm32的各种硬件配置编写的头文件,可要找准着你的你自己的硬件配置使用哦!
3、myos.h
1 #ifndef MYOS_H 2 #define MYOS_H 3 #include "stm32f10x.h" 4 5 /**********CPU DEPENDENT************/ 6 #define TASK_TIME_SLICE 5 // 5ms for every task to run every time 7 8 typedef unsigned char INT8U; // Unsigned 8 bit quantity 9 typedef unsigned short INT16U; // Unsigned 16 bit quantity 10 typedef unsigned int INT32U; // Unsigned 32 bit quantity 11 12 typedef unsigned int OS_STK; // Each stack entry is 32-bit wide(OS Stack) 13 14 // assembling functions 15 void OS_ENTER_CRITICAL(void); // Enter Critical area, that is to disable interruptions 16 void OS_EXIT_CRITICAL(void); // Exit Critical area, that is to enable interruptions 17 void OSCtxSw(void); // Task Switching Function(OS Context Switch) 18 void OSStart(void); 19 20 OS_STK* OSTaskStkInit(void (*task)(void *p_arg), // task function 21 void *p_arg, // (pointer of arguments) 22 OS_STK *p_tos); // (pointer to the top of stack) 23 /**********CPU INDEPENDENT************/ 24 25 #define OS_MAX_TASKS 16 26 27 #define TASK_STATE_CREATING 0 28 #define TASK_STATE_RUNNING 1 29 #define TASK_STATE_PAUSING 2 30 31 #define TASK_STACK_SIZE 64 32 33 #define LED1TURN() (GPIOA->ODR ^= 1<<8) // reverse the voltage of LED1 !!!HARDWARE RELATED 34 #define LED2TURN() (GPIOD->ODR ^= 1<<2) // reverse the voltage of LED2 !!!HARDWARE RELATED 35 36 37 typedef struct os_tcb { 38 OS_STK *OSTCBStkPtr; // (OS Task Control Block Stack Pointer) 39 INT8U OSTCBStat; // (OS Task Control Block Status) 40 } OS_TCB; // (OS Task Control Block) 41 42 void OSInit(void); // (OS Initialization) 43 void LedInit(void); 44 45 void OS_TaskIdle(void *p_arg); 46 void OSInitTaskIdle(void); // (OS Initialization of "TaskIdle") 47 void OSTaskCreate(void (*task)(void *p_arg), // task function 48 void *p_arg, // (pointer of arguments) 49 OS_STK *p_tos); // (pointer to the top of stack) 50 void OSTCBSet(OS_TCB *p_tcb, OS_STK *p_tos, INT8U task_state); 51 52 53 void SysTickInit(INT8U Nms); // (System Tick Initialization) 54 void SysTick_Handler(void); // The interrupt function 55 56 INT32U GetTime(void); 57 void delayMs(volatile INT32U ms); // The argument can't be too large 58 59 #endif
这是最后一个头文件了,也是一个简单易懂的文件。同时也是最后的平原,过了这个平原,我们可就要翻雪山啦!
(1)简单说说2个函数:
void OS_ENTER_CRITICAL(void);
void OS_EXIT_CRITICAL(void);
有一种东西叫“临界区”(CRITICAL),这些所谓“临界区”指的是一些变量所在的内存,可以直接理解成“就是些特殊变量”。
要访问这些变量必须得关掉“中断”,访问结束后再开启“中断”,开关“中断”就是这两个函数的任务了。
猜猜看哪个是开“中断”,哪个是关“中断”呢?
(2)系统时钟中断void SysTick_Handler(void)的由来:
来自官方启动文件startup_stm32f10x_hd.s。
小白兔笔记:
小白兔表示“感觉不会再爱了……”
4、os_cpu_a.asm和myos.c:
上文说过,这两个文件关系暧昧,扯开来只讲其中一个很没味道,这里先把它们都贴出来:
os_cpu_a.asm(“;”后的注释是对应"C"语言的解释):
1 IMPORT OSTCBCur 2 IMPORT OSTCBNext 3 4 EXPORT OS_ENTER_CRITICAL 5 EXPORT OS_EXIT_CRITICAL 6 EXPORT OSStart 7 EXPORT PendSV_Handler 8 EXPORT OSCtxSw 9 10 NVIC_INT_CTRL EQU 0xE000ED04 ; Address of NVIC Interruptions Control Register 11 NVIC_PENDSVSET EQU 0x10000000 ; Enable PendSV 12 NVIC_SYSPRI14 EQU 0xE000ED22 ; System priority register (priority 14). 13 NVIC_PENDSV_PRI EQU 0xFF ; PendSV priority value (lowest). 14 15 PRESERVE8 ; align 8 16 17 AREA |.text|, CODE, READONLY 18 THUMB 19 20 ;/******************OS_ENTER_CRITICAL************/ 21 OS_ENTER_CRITICAL 22 CPSID I ; Enable interruptions(Change Processor States: Interrupts Disable) 23 BX LR ; Return 24 25 ;/******************OS_EXIT_CRITICAL************/ 26 OS_EXIT_CRITICAL 27 CPSIE I ; Disable interruptions 28 BX LR ; Return 29 30 ;/******************OSStart************/ 31 OSStart 32 ; disable interruptions 33 CPSID I ; OS_ENTER_CRITICAL(); 34 ; initialize PendSV 35 ; Set the PendSV exception priority 36 LDR R0, =NVIC_SYSPRI14 ; R0 = NVIC_SYSPRI14; 37 LDR R1, =NVIC_PENDSV_PRI ; R1 = NVIC_PENDSV_PRI; 38 STRB R1, [R0] ; *R0 = R1; 39 40 ; initialize PSP as 0 41 ; MOV R4, #0 42 LDR R4, =0x0 ; R4 = 0; 43 MSR PSP, R4 ; PSP = R4; 44 45 ; trigger PendSV 46 LDR R4, =NVIC_INT_CTRL ; R4 = NVIC_INT_CTRL; 47 LDR R5, =NVIC_PENDSVSET ; R5 = NVIC_PENDSVSET; 48 STR R5, [R4] ; *R4 = R5; 49 50 ; enable interruptions 51 CPSIE I ; OS_EXIT_CRITICAL(); 52 53 ; should never get here 54 ; a endless loop 55 OSStartHang 56 B OSStartHang 57 58 ;/******************PendSV_Handler************/ 59 PendSV_Handler 60 CPSID I ; OS_ENTER_CRITICAL(); 61 ; judge if PSP is 0 which means the task is first invoked 62 MRS R0, PSP ; R0 = PSP; 63 CBZ R0, PendSV_Handler_NoSave ; if(R0 == 0) goto PendSV_Handler_NoSave; 64 65 ; R12, R3, R2, R1 66 SUB R0, R0, #0x20 ; R0 = R0 - 0x20; 67 68 ; store R4 69 STR R4 , [R0] ; *R0 = R4; 70 ADD R0, R0, #0x4 ; R0 = R0 + 0x4; 71 ; store R5 72 STR R5 , [R0] ; *R0 = R5; 73 ADD R0, R0, #0x4 ; R0 = R0 + 0x4; 74 ; store R6 75 STR R6 , [R0] ; *R0 = R6; 76 ADD R0, R0, #0x4 ; R0 = R0 + 0x4; 77 ; store R7 78 STR R7 , [R0] ; *R0 = R7; 79 ADD R0, R0, #0x4 ; R0 = R0 + 0x4; 80 ; store R8 81 STR R8 , [R0] ; *R0 = R8; 82 ADD R0, R0, #0x4 ; R0 = R0 + 0x4; 83 ; store R9 84 STR R9, [R0] ; *R0 = R4; 85 ADD R0, R0, #0x4 ; R0 = R0 + 0x4; 86 ; store R10 87 STR R10, [R0] ; *R0 = R10; 88 ADD R0, R0, #0x4 ; R0 = R0 + 0x4; 89 ; store R11 90 STR R11, [R0] ; *R0 = R11; 91 ADD R0, R0, #0x4 ; R0 = R0 + 0x4; 92 93 SUB R0, R0, #0x20 ; R0 = R0 - 0x20; 94 95 ; easy method 96 ;SUB R0, R0, #0x20 97 ;STM R0, {R4-R11} 98 99 LDR R1, =OSTCBCur ; R1 = OSTCBCur; 100 LDR R1, [R1] ; R1 = *R1;(R1 = OSTCBCur->OSTCBStkPtr) 101 STR R0, [R1] ; *R1 = R0;(*(OSTCBCur->OSTCBStkPrt) = R0) 102 103 PendSV_Handler_NoSave 104 LDR R0, =OSTCBCur ; R0 = OSTCBCur; 105 LDR R1, =OSTCBNext ; R1 = OSTCBNext; 106 LDR R2, [R1] ; R2 = OSTCBNext->OSTCBStkPtr; 107 STR R2, [R0] ; *R0 = R2;(OSTCBCur->OSTCBStkPtr = OSTCBNext->OSTCBStkPtr) 108 109 LDR R0, [R2] ; R0 = *R2;(R0 = OSTCBNext->OSTCBStkPtr) 110 ; LDM R0, {R4-R11} 111 ; load R4 112 LDR R4, [R0] ; R4 = *R0;(R4 = *(OSTCBNext->OSTCBStkPtr)) 113 ADD R0, R0, #0x4 ; R0 = R0 + 0x4;(OSTCBNext->OSTCBStkPtr++) 114 ; load R5 115 LDR R5, [R0] ; R5 = *R0;(R5 = *(OSTCBNext->OSTCBStkPtr)) 116 ADD R0, R0, #0x4 ; R0 = R0 + 0x4;(OSTCBNext->OSTCBStkPtr++) 117 ; load R6 118 LDR R6, [R0] ; R6 = *R0;(R6 = *(OSTCBNext->OSTCBStkPtr)) 119 ADD R0, R0, #0x4 ; R0 = R0 + 0x4;(OSTCBNext->OSTCBStkPtr++) 120 ; load R7 121 LDR R7 , [R0] ; R7 = *R0;(R7 = *(OSTCBNext->OSTCBStkPtr)) 122 ADD R0, R0, #0x4 ; R0 = R0 + 0x4;(OSTCBNext->OSTCBStkPtr++) 123 ; load R8 124 LDR R8 , [R0] ; R8 = *R0;(R8 = *(OSTCBNext->OSTCBStkPtr)) 125 ADD R0, R0, #0x4 ; R0 = R0 + 0x4;(OSTCBNext->OSTCBStkPtr++) 126 ; load R9 127 LDR R9 , [R0] ; R9 = *R0;(R9 = *(OSTCBNext->OSTCBStkPtr)) 128 ADD R0, R0, #0x4 ; R0 = R0 + 0x4;(OSTCBNext->OSTCBStkPtr++) 129 ; load R10 130 LDR R10 , [R0] ; R10 = *R0;(R10 = *(OSTCBNext->OSTCBStkPtr)) 131 ADD R0, R0, #0x4 ; R0 = R0 + 0x4;(OSTCBNext->OSTCBStkPtr++) 132 ; load R11 133 LDR R11 , [R0] ; R11 = *R0;(R11 = *(OSTCBNext->OSTCBStkPtr)) 134 ADD R0, R0, #0x4 ; R0 = R0 + 0x4;(OSTCBNext->OSTCBStkPtr++) 135 136 MSR PSP, R0 ; PSP = R0;(PSP = OSTCBNext->OSTCBStkPtr) 137 ; P42 138 ; P139 (key word: EXC_RETURN) 139 ; use PSP 140 ORR LR, LR, #0x04 ; LR = LR | 0x04; 141 CPSIE I ; OS_EXIT_CRITICAL(); 142 BX LR ; return; 143 144 OSCtxSw ;OS context switch 145 PUSH {R4, R5} 146 LDR R4, =NVIC_INT_CTRL ; R4 = NVIC_INT_CTRL 147 LDR R5, =NVIC_PENDSVSET ; R5 = NVIC_PENDSVSET 148 STR R5, [R4] ; *R4 = R5 149 POP {R4, R5} 150 BX LR ; return; 151 152 align 4 153 end
myos.c:
1 #include "myos.h" 2 #include "stm32f10x.h" 3 4 5 OS_TCB OSTCBTbl[OS_MAX_TASKS]; // (OS Task Control Block Table) 6 OS_STK TASK_IDLE_STK[TASK_STACK_SIZE]; //("TaskIdle" Stack) 7 OS_TCB *OSTCBCur; // Pointer to the current running task(OS Task Control Block Current) 8 OS_TCB *OSTCBNext; // Pointer to the next running task(OS Task Control Block Next) 9 INT8U OSTaskNext; // Index of the next task 10 INT32U TaskTickLeft; // Refer to the time ticks left for the current task 11 INT32U TimeMS; 12 INT32U TaskTimeSlice; 13 char * Systick_priority = (char *)0xe000ed23; 14 // Initialize the stack of a task, it is of much relationship with the specific CPU 15 OS_STK* OSTaskStkInit(void (*task)(void *p_arg), 16 void *p_arg, 17 OS_STK *p_tos) 18 { 19 OS_STK *stk; 20 stk = p_tos; 21 22 *(stk) = (INT32U)0x01000000L; // xPSR 23 *(--stk) = (INT32U)task; // Entry Point 24 25 // Don't be serious with the value below. They are of random 26 *(--stk) = (INT32U)0xFFFFFFFEL; // R14 (LR) 27 *(--stk) = (INT32U)0x12121212L; // R12 28 *(--stk) = (INT32U)0x03030303L; // R3 29 *(--stk) = (INT32U)0x02020202L; // R2 30 *(--stk) = (INT32U)0x01010101L; // R1 31 32 // pointer of the argument 33 *(--stk) = (INT32U)p_arg; // R0 34 35 // Don't be serious with the value below. They are of random 36 *(--stk) = (INT32U)0x11111111L; // R11 37 *(--stk) = (INT32U)0x10101010L; // R10 38 *(--stk) = (INT32U)0x09090909L; // R9 39 *(--stk) = (INT32U)0x08080808L; // R8 40 *(--stk) = (INT32U)0x07070707L; // R7 41 *(--stk) = (INT32U)0x06060606L; // R6 42 *(--stk) = (INT32U)0x05050505L; // R5 43 *(--stk) = (INT32U)0x04040404L; // R4 44 return stk; 45 } 46 47 // Only to initialize the Task Control Block Table 48 void OSInit(void) 49 { 50 INT8U i; 51 OS_ENTER_CRITICAL(); 52 for(i = 0; i < OS_MAX_TASKS; i++) { 53 OSTCBTbl[i].OSTCBStkPtr = (OS_STK*)0; 54 OSTCBTbl[i].OSTCBStat = TASK_STATE_CREATING; 55 } 56 OSInitTaskIdle(); 57 OSTCBCur = &OSTCBTbl[0]; 58 OSTCBNext = &OSTCBTbl[0]; 59 OS_EXIT_CRITICAL(); 60 } 61 62 void OSInitTaskIdle(void) 63 { 64 OS_ENTER_CRITICAL(); 65 OSTCBTbl[0].OSTCBStkPtr = OSTaskStkInit(OS_TaskIdle, (void *)0, (OS_STK*)&TASK_IDLE_STK[TASK_STACK_SIZE - 1]); 66 OSTCBTbl[0].OSTCBStat = TASK_STATE_RUNNING; 67 OS_EXIT_CRITICAL(); 68 } 69 70 void OSTaskCreate(void (*task)(void *p_arg), 71 void *p_arg, 72 OS_STK *p_tos) 73 { 74 OS_STK * tmp; 75 INT8U i = 1; 76 OS_ENTER_CRITICAL(); 77 while(OSTCBTbl[i].OSTCBStkPtr != (OS_STK*)0) { 78 i++; 79 } 80 tmp = OSTaskStkInit(task, p_arg, p_tos); 81 OSTCBSet(&OSTCBTbl[i], tmp, TASK_STATE_CREATING); 82 OS_EXIT_CRITICAL(); 83 } 84 85 void OSTCBSet(OS_TCB *p_tcb, OS_STK *p_tos, INT8U task_state) 86 { 87 p_tcb->OSTCBStkPtr = p_tos; 88 p_tcb->OSTCBStat = task_state; 89 } 90 91 void OS_TaskIdle(void *p_arg) 92 { 93 p_arg = p_arg; // No use of p_arg, only for avoiding "warning" here. 94 for(;;) { 95 // OS_ENTER_CRITICAL(); 96 // Nothing to do 97 // OS_EXIT_CRITICAL(); 98 } 99 } 100 101 // void SysTick_Handler(void) 102 // { 103 // // OS_ENTER_CRITICAL(); 104 // // OS_EXIT_CRITICAL(); 105 // } 106 void SysTick_Handler(void) 107 { 108 OS_ENTER_CRITICAL(); 109 if((--TaskTimeSlice) == 0){ 110 TaskTimeSlice = TASK_TIME_SLICE; 111 OSTCBCur = OSTCBNext; 112 OSCtxSw(); 113 OSTaskNext++; 114 while(OSTCBTbl[OSTaskNext].OSTCBStkPtr == (OS_STK*)0) { 115 OSTaskNext++; 116 if(OSTaskNext >= OS_MAX_TASKS) { 117 OSTaskNext = 0; 118 } 119 } 120 OSTCBNext = &OSTCBTbl[OSTaskNext]; 121 TaskTimeSlice = TASK_TIME_SLICE; 122 } 123 TimeMS++; 124 OS_EXIT_CRITICAL(); 125 } 126 127 void SysTickInit(INT8U Nms) 128 { 129 130 OS_ENTER_CRITICAL(); 131 132 TimeMS = 0; 133 TaskTimeSlice = TASK_TIME_SLICE; 134 135 SysTick->LOAD = 1000 * Nms - 1; 136 *Systick_priority = 0x00; 137 SysTick->VAL = 0; 138 SysTick->CTRL = 0x3; 139 OS_EXIT_CRITICAL(); 140 } 141 142 INT32U GetTime(void) 143 { 144 return TimeMS; 145 } 146 147 void delayMs(volatile INT32U ms) 148 { 149 INT32U tmp; 150 tmp = GetTime() + ms; 151 while(1){ 152 if(tmp < GetTime()) break; 153 } 154 } 155 156 void LedInit(void) 157 { 158 RCC->APB2ENR |= 1<<2; 159 RCC->APB2ENR |= 1<<5; 160 //GPIOE->CRH&=0X0000FFFF; 161 //GPIOE->CRH|=0X33330000; 162 163 GPIOA->CRH &= 0xfffffff0; 164 GPIOA->CRH |= 0x00000003; 165 //GPIOA->ODR &= 0xfffffeff; 166 GPIOA->ODR |= 1<<8; 167 168 GPIOD->CRL &= 0xfffff0ff; 169 GPIOD->CRL |= 0x00000300; 170 //GPIOD->ODR &= 0xfffffffd; 171 GPIOD->ODR |= 1<<2; 172 173 //LED1TURN(); 174 LED2TURN(); 175 176 }
现在我们将按照下列过程展开叙述:
初始化OS--》创建任务--》初始化OS时间单位--》初始化LED灯--》启动OS;
“咦?怎么感觉这些步骤似曾相识呢?”
当然“相识”啦,这个就是main函数的那几行代码的意义啊!快看快看,第一行是OSInit(),这个函数到底做了些什么呢?
(1)初始化OS:
OSInit将完成以下工作:
I. 初始化全局变量OSTCBTbl结构体数组;
II. 创建一个“Idle task”;
III.初始化OSTCBCur和OSTCBNext。
1 void OSInit(void) 2 { 3 INT8U i; 4 OS_ENTER_CRITICAL(); 5 for(i = 0; i < OS_MAX_TASKS; i++) { 6 OSTCBTbl[i].OSTCBStkPtr = (OS_STK*)0; 7 OSTCBTbl[i].OSTCBStat = TASK_STATE_CREATING; 8 } 9 OSInitTaskIdle(); 10 OSTCBCur = &OSTCBTbl[0]; 11 OSTCBNext = &OSTCBTbl[0]; 12 OS_EXIT_CRITICAL(); 13 }
首先是第4行,就是进入“临界区”啦,也就是关中断。
接着是第5~8行的循环,其实就是初始化全局变量OSTCBTbl这个结构体数组,关键是这个结构体的指针OSTCBStkPtr,它之后会指向每个任务对应的堆栈,
此处全部初始化为“0”。当任务被创建时,它就会指向实际的内存地址,作为任务的堆栈:
第9行,创建一个“Idle Task”。此处不继续深挖它,我们后面会深讲创建一个任务的具体过程,之后就自然能看懂该函数的具体内容了。
此处要有一个概念,也就是我们在这里已经创建了一个”Task“了,即便我们后来一个“task”也不创建,CPU也会执行“Idle task”的。
然后是第10~11行,使OSTCBCur和OSTCBNext都指向“Idle task”,OSTCBCur指“OS Task Control Block Current”,
OSTCBNext当然是指“OS Task Control Block Next”咯,这两个指针是后来用于进行“任务切换”的,不知你可否体会呢^_^?
最后是第12行,离开临界区,也就是开中断。
(2)创建任务:
OSTaskCreate会完成以下工作:
I. 找到一个“空闲的”OSTCBTbl;
II. 初始化参数“p_tos”所指向的内存,并将其作为任务堆栈,最重要的是,使堆栈记录参数task所指向的函数的入口地址;
III. 设置新的OSTCBTbl的状态为TASK_STATE_CREATING
(这个状态变量在本OS中算是个bug,但好在没有用到这个变量,所以就暂且没管,所以你也可以暂且不管)
1 void OSTaskCreate(void (*task)(void *p_arg), 2 void *p_arg, 3 OS_STK *p_tos) 4 { 5 OS_STK * tmp; 6 INT8U i = 1; 7 OS_ENTER_CRITICAL(); 8 while(OSTCBTbl[i].OSTCBStkPtr != (OS_STK*)0) { 9 i++; 10 } 11 tmp = OSTaskStkInit(task, p_arg, p_tos); 12 OSTCBSet(&OSTCBTbl[i], tmp, TASK_STATE_CREATING); 13 OS_EXIT_CRITICAL(); 14 }
不得不提醒“小白兔们”,现在我们已经来到了这座OS之山最险峻的地方了!!!
如果实在坚持不下去了,就先休息休息。有时候,就差那么点“心领神会”,施主若是与OS有缘,那么缘分总会来的。
首先讲第8~9行的循环是什么意思:
在“OS初始化”中,我们把OSTCBTbl这个结构体数组的OSTCBStkPtr指针都初始化成了“0”,当然这些被初始化的“OSTCBTbl”都是“空闲的”,也就是没有被分配给具体任务,所以它指向堆栈地址的指针肯定是“0”,如果不是空闲的,它就应当指向具体的堆栈地址。此处循环的跳出条件就是找到某个OSTCBTbl的堆栈指针为“0”,也就是找到空闲的OSTCBTbl,此时的“i”为其偏移量。记住,“我们要创建一个新task,所以我们就需要一个空闲的OSTCBTbl来记录这个task的堆栈信息。”这样就能明白这个循环的目的了。
接着是第11行,也就是最难的地方了。
“OSTaskStkInit”,就是这个函数,它会完成以下工作:
I. 因为参数p_tos指向堆栈栈顶(Pointer Top Of Stack),所以我们要将其依次递减,并初始化其下的一段内存中的内容。
OSTaskCreate(Task1, (void*)0, (OS_STK*)&Task1Stk[TASK_STACK_SIZE-1]);
这是main函数调用的部分,这个参数指向的正是栈顶!
1 OS_STK* OSTaskStkInit(void (*task)(void *p_arg), 2 void *p_arg, 3 OS_STK *p_tos) 4 { 5 OS_STK *stk; 6 stk = p_tos; 7 8 *(stk) = (INT32U)0x01000000L; // xPSR 9 *(--stk) = (INT32U)task; // Entry Point 10 11 // Don't be serious with the value below. They are of random 12 *(--stk) = (INT32U)0xFFFFFFFEL; // R14 (LR) 13 *(--stk) = (INT32U)0x12121212L; // R12 14 *(--stk) = (INT32U)0x03030303L; // R3 15 *(--stk) = (INT32U)0x02020202L; // R2 16 *(--stk) = (INT32U)0x01010101L; // R1 17 18 // pointer of the argument 19 *(--stk) = (INT32U)p_arg; // R0 20 21 // Don't be serious with the value below. They are of random 22 *(--stk) = (INT32U)0x11111111L; // R11 23 *(--stk) = (INT32U)0x10101010L; // R10 24 *(--stk) = (INT32U)0x09090909L; // R9 25 *(--stk) = (INT32U)0x08080808L; // R8 26 *(--stk) = (INT32U)0x07070707L; // R7 27 *(--stk) = (INT32U)0x06060606L; // R6 28 *(--stk) = (INT32U)0x05050505L; // R5 29 *(--stk) = (INT32U)0x04040404L; // R4 30 return stk; 31 }
关键是为何要这样初始化呢?第一次看的话,先从下文找点感觉,看完全部后,还需回来体味体味。
首先,参照《Cortex-M3权威指南(中文版)》P135,表9.1
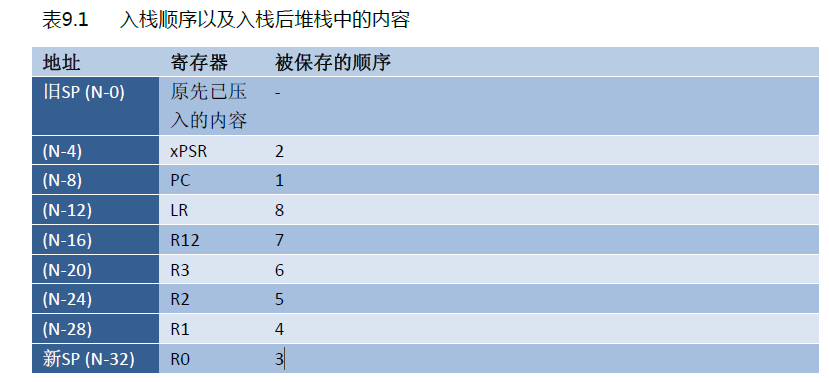
中断发生时,CPU会将以上寄存器按上述顺序压入PSP中,当我们只有一个main任务需要执行时,PSP就足够帮我们保留现场的了,以至于在中断返回时,从PSP去取出先前的main任务的寄存器内容就可以了(你是不是能看出上表与我们的函数内容的对应关系呢?)。
但是“多任务”当然就不止一个main任务了,假设我们有3个任务,task1,task2,task3:
task1--》task2;PSP会保留task1的寄存器信息;
task2--》task3;PSP会再保留task2的寄存器信息,但是task1的寄存器信息就被覆盖掉了!
task3-----????-----task1
那么接下来就悲剧了。
当然,这个函数只是先给以后会用到的堆栈初始化,至于具体值并不重要,除了第8、9、19行:
第8行指定的是一个程序正常运行时,状态寄存器PSR该有的值;
第9行指定的是任务的入口地址。这个当然重要啦!因为我们的任务就是这个地址所指向的函数。
第19行指定的是任务函数参数的所在地址,因为我们一直赋值为“0”,所以暂且没有太多意义。
至于其他初始化的值,比如
(INT32U)0x08080808L;
这都无关紧要,随你怎么设置都行。
最后第30行,函数返回堆栈指针,该指针现在指向地址的内容为0x04040404L,依照注释,就是以后存储R4寄存器内容的地址。
回到 OSTaskCreate函数第12行,它使得先前找到的OSTCBTbl不再“空闲了”。
(3)初始化SysTick中断和LED:
在main函数中
SysTickInit(5);
LedInit();
都是与硬件相关的,唯一需要说明的是“SysTickInit(5)”当中的“5”没有太多含义,只是越大,中断发生的时间间隔就越大,具体依照硬件时钟而定。
(4)main函数最后一行:
OSStart()
该函数一旦执行,将永不返回。注意,接下来我们要和汇编交手了,从汇编部分(os_cpu_a.asm)第31行开始。
这里要请大家注意,每行汇编语言后都有对应的C语言注释,对照着看更容易理解。
第32行:
CPSID I
参照《Cortex-M3权威指南(中文版)》P42,该命令即为关中断,相当于给PRIMASK写“1”。
(注:CPSID指的是属于CPS(Control Processor State)指令的Interrupt Disable指令)
第36~38行:
LDR R0, =NVIC_SYSPRI14
LDR R1, =NVIC_PENDSV_PRI
STRB R1, [R0]
设置PendSV中断优先级。
第42~43行:
LDR R4, =0x0
MSR PSP, R4
初始PSP寄存器,使之为0。这个“0”表示的是我们的OS才启动,还没有任务被运行,后面很快就有说明。
第46~48行:
LDR R4, =NVIC_INT_CTRL
LDR R5, =NVIC_PENDSVSET
STR R5, [R4]
触发PendSV中断。
“什么!触发中断了!哎呀哎呀,怎么办?中断函数在哪儿?”
小白兔请先别着急,由于先前我们已经关掉中断了,所以程序还会继续往下执行,直到我们再开启中断。
由于我们真正的目的就是要开启PendSV中断,所以下一步我们要开中断啦!
第51行:
CPSIE I
开中断。由于PendSV被触发了,所以接下来CPU跳到PendSV的中断处理函数处执行。也就是os_cpu_a.asm的第59行。
第60行是关中断。
第62~63行:
MRS R0, PSP
CBZ R0, PendSV_Handler_NoSave
比较PSP是否为0,若是0就跳转到PendSV_Handler_NoSave处执行,由于OSStart先前将PSP初始化为0,所以就直接调到PendSV_Handler_NoSave处执行咯。
第104~107行
LDR R0, =OSTCBCur
LDR R1, =OSTCBNext
LDR R2, [R1]
STR R2, [R0]
将OSTCBNext所指向地址的前4个字节,赋给OSTCBCur所指向地址的前4个字节,而这4个字节正是两个指针所指向结构体的OSTCBStkPtr变量!
这段代码做的就是将下个任务的堆栈指针(OSTCBNext)赋给当前任务的堆栈指针(OSTCBCur),因为PendSV中断所做的事情就是进行任务切换。
我们知道,一开始OSTCBCur和OSTCBNext一开始都是指向“Idle Task”的,所以下一个要运行的任务就是“Idle Task”。
第109行:
LDR R0, [R2]
将所要切换的堆栈指针地址赋给R0。
第112~134行:
LDR R4, [R0]
ADD R0, R0, #0x4
LDR R5, [R0]
ADD R0, R0, #0x4
……
LDR R11 , [R0]
ADD R0, R0, #0x4
将堆栈指针R0所指向的堆栈内容赋给R4~R11。问个问题,“这些值都是多少你知道吗?”
“好了,这时候你是不是想问个问题,R0~R3怎么不给它们也赋值呢?”
回到先前那个要大家需要体味的地方
参照《Cortex-M3权威MSR PSP, R0指南(中文版)》P135,表9.1
还有接下来第136行:
MSR PSP, R0
我只说一句:CPU会自动从PSP保存和加载8个量至R0~R3,R12,LR,程序入口(这个是理解的关键)和xPSR,我们无需动手。
第140行:
ORR LR, LR, #0x04
参照《Cortex-M3权威MSR PSP, R0指南(中文版)》P139,这行是为了在回到任务后,确保继续使用PSP堆栈。
第141行开中断,此时一般还不会有中断介入,但我们要记住,现在我们还处在PendSV中断中,第142从PendSV中断返回,返回后CPU则去新的任务处执行了。
让我们再回到OS_cpu_a.asm的第62~63行,当PSP不为零,也就是已经有任务运行了,那么我们就需要先保存这个将被切换出去的任务的寄存器信息。
现在PSP指向的堆栈地址如图所示:
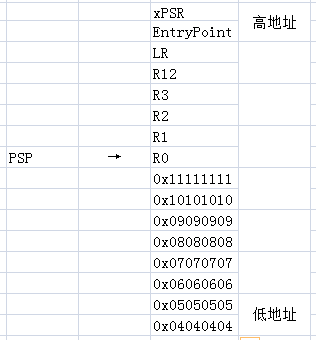
完成第62~66行命令之后,我们得到:
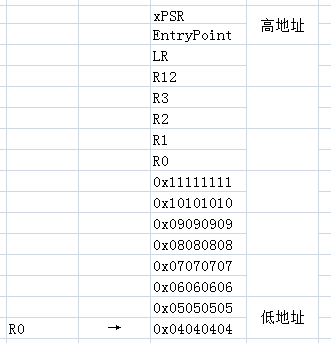
该图中有两个”R0",并不是很得体,我还是解释一下,左边的R0指的是PendSV中断下正在使用的R0寄存器,右边的R0指的是被中断的任务的R0寄存机所存储的值。
保护现场,保护现场啦!将R4~R11全部存储起来。
“为什么R0~R3不用保护呢?”
因为……你看啊,其实CPU自己已经在PendSV中断发生时,“擅自”把它们存储了,就在上图啊!
完成第69~91行命令之后,再将R0减去0x20,堆栈就变成这样啦:
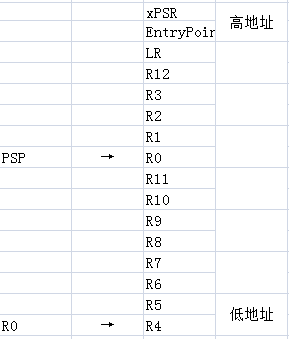
然后是第99~101行:
把R0的值赋给OSTCBCur的OSTCBStkPtr指针,这下我们就放心了,所有有关任务的信息都被存放在了相应的OSTCBTbl中了。
接下来就是该切换进入新任务了。
(5)谁来触发PendSV,实现切换任务
如果到此为止,那么CPU只会一直没完没了的执行第一个任务:Idle Task。OSStart确实完成了一次任务切换,但也仅仅就“一次”。
main函数已经没得指望了,它早就撒手不管了,那么谁来再次触发PendSV,从而执行Task1、Task2呢?
别忘了,我们还有一个关键角色没有登场呢:SysTick中断。
让我们回到myos.c的106行的SysTick的中断服务函数:SysTick_Handler。
这个函数逻辑很简单:每发生一次SysTick中断,就将TimeTaskSlice递减,当TimeTaskSlice为0时,就进行切换任务的工作,并将TimeTaskSlice的值还原。
每一次中断发生,TimeMS都会加1,从而记录整个系统的时间。
第111行:
OSTCBCur = OSTCBNext;
将当前任务指针指向下一个任务。
第112行:
OSCtxSw();
这是个汇编实现的函数,在os_cpu_a.asm的第144~150行。
非常简单,它就是在触发PendSV中断!!!
当然,这个触发不会立即发生,因为现在还处于关中断状态。
第113行:
OSTaskNext++;
之前忘记介绍了,这是个全局整型变量,用来记录下一个任务的偏移量的。由于我们的任务没有优先级,只是轮换执行,所以将OSTaskNext向后偏移一个就行了。
但是,如果我们偏移到了最后一个任务怎么办呢?我们得从第一个任务重新开始才是,所以就有了第144~149的循环部分。
第120行:
OSTCBNext = &OSTCBTbl[OSTaskNext];
设置新的下一个要运行的任务的任务指针。
第121行有点多余,不要也行。
第124行开中断,这行命令执行完之后,PendSV就会被触发,接着就是去执行新的任务咯。
至此,关于本OS的关键代码部分就解析完毕了。
真心希望大家多提意见,鄙人将感激涕零!
ansersion@sina.com

 浙公网安备 33010602011771号
浙公网安备 33010602011771号