ML - 深度学习之美十四章-概念摘要(1~7)
原文链接:https://yq.aliyun.com/topic/111
本文是对原文内容中部分概念的摘取记录,可能有轻微改动,但不影响原文表达。
01 - 一入侯门“深”似海,深度学习深几许
什么是“学习”?
“如果一个系统,能够通过执行某个过程,就此改进了它的性能,那么这个过程就是学习”。
学习的核心目的,就是改善性能。
什么是机器学习?
定义1:
对于计算机系统而言,通过运用数据及某种特定的方法(比如统计的方法或推理的方法),来提升机器系统的性能,就是机器学习。
定义2:
对于某类任务(Task,简称T)和某项性能评价准则(Performance,简称P),如果一个计算机程序在T上,以P作为性能的度量,随着很多经验(Experience,简称E)不断自我完善,那么我们称这个计算机程序在从经验E中学习了。
学习问题的三个特征:
- 任务的类型
- 衡量任务性能提升的标准
- 获取经验的来源
统计机器学习
统计机器学习的对象,其实就是数据。
对于计算机系统而言,所有的“经验”都是以数据的形式存在的。
作为学习的对象,数据的类型是多样的,可以是各种数字、文字、图像、音频、视频,也可以是它们的各种组合。
统计机器学习,就是从数据出发,提取数据的特征,抽象出数据的模型,发现数据中的知识,最后又回到数据的分析与预测当中去。
传统的机器学习方式
传统的机器学习方式,通常是用人类的先验知识,把原始数据预处理成各种特征(feature),然后对特征进行分类。
然而,这种分类的效果,高度取决于特征选取的好坏。
传统的机器学习专家们,把大部分时间都花在如何寻找更加合适的特征上。
因此,传统的机器学习,其实可以有个更合适的称呼:特征工程(feature engineering)。
特征是由人找出来的,自然也就为人所能理解,性能好坏,机器学习专家们可以“冷暖自知”,灵活调整。
深度学习
深度学习在本质上属于可统计不可推理的统计机器学习范畴。
很多时候呈现出来的就是一个黑箱(Black Box)系统,其性能很好,却不知道为何而好,缺乏解释性。
深度学习中的“end-to-end(端到端):输入的是原始数据(始端),然后输出的直接就是最终目标(末端),中间过程不可知。
深度学习的学习对象同样是数据,但与传统机器学习所不同的是,它需要大量的数据,也就是“大数据(Big Data)”。
深度学习的产生
阶段1:特征表示学习(feature representation learning)
- 神经网络自己学习如何抓取数据的特征
- 效果好,对数据的拟合也更加灵活好用
- 代价:机器自己学习出来的特征存在于机器空间,完全超越了人类理解的范畴,成为了“黑盒”,人们只能依据经验调试神经网络的学习性能,不断地尝试性地进行大量重复的网络参数调整
阶段2:深度学习
- 网络进一步加深,出现了多层次的“表示学习”,学习的性能提升到另一个高度。
- 这种多层次的“表示学习”,人们称之为“Deep Learning(深度学习)”。
机器学习与深度学习的简明对比
“机器学习”的核心要素,那就是通过对数据运用,依据统计或推理的方法,让计算机系统的性能得到提升。
而深度学习,则是把由人工选取对象特征,变更为通过神经网络自己选取特征,为了提升学习的性能,神经网络的表示学习的层次较多(较深)。
02 - 人工“碳”索意犹尽,智能“硅”来未可知
深度学习的算法
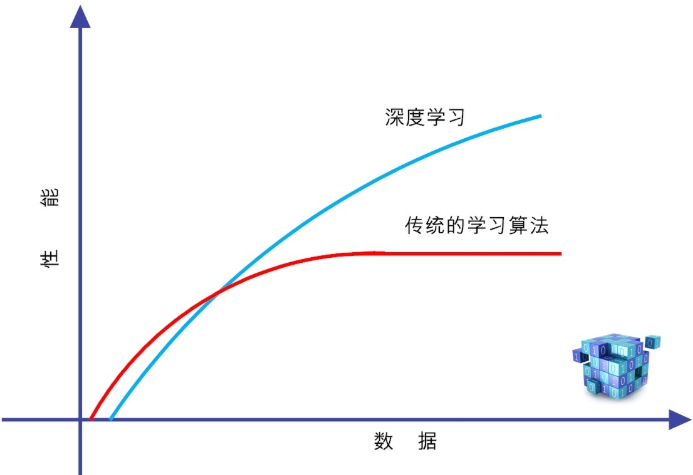
深度学习是高度数据依赖型的算法,它的性能通常随着数据量的增加而不断增强,也就是说它的可扩展性(Scalability)显著优于传统的机器学习算法。
如果训练数据比较少,深度学习的性能并不见得就比传统机器学习好。
其潜在的原因在于,作为复杂系统代表的深度学习算法,只有数据量足够多,才能通过训练,在深度神经网络中,“恰如其分”地将把蕴含于数据之中的复杂模式表征出来。
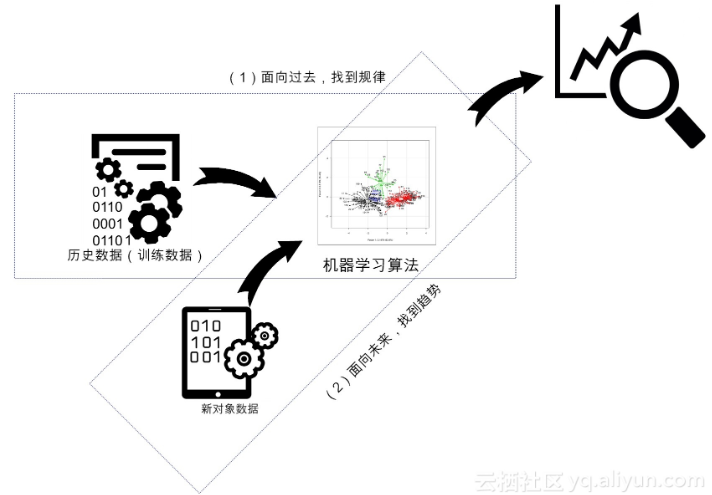
机器学习的两层作用
- (1)面向过去(对收集到的历史数据,用作训练),发现潜藏在数据之下的模式,
描述性分析(Descriptive Analysis),主要使用了“归纳”。
对历史对象的归纳,可以让人们获得新洞察、新知识, - (2)面向未来,基于已经构建的模型,对于新输入数据对象实施预测,
预测性分析(Predictive Analysis),更侧重于“演绎”。
对新对象实施演绎和预测,可以使机器更加智能,或者说让机器的某些性能得以提高。
二者相辅相成,均不可或缺。
机器学习的三步法
机器学习在本质就是寻找一个好用的函数,具体说来,机器学习要想做得好,需要走好三大步:
- (1)如何找一系列函数来实现预期的功能,这是建模问题。
- (2)如何找出一组合理的评价标准,来评估函数的好坏,这是评价问题。
- (3) 如何快速找到性能最佳的函数,这是优化问题。
什么是神经网络?
“神经网络,是一种由具有自适应性的简单单元构成的广泛并行互联的网络,它的组织结构能够模拟生物神经系统对真实世界所作出的交互反应。”
人工智能领域的两大主流门派
符号主义
- 理念:知识是信息的一种表达形式,人工智能的核心任务,就是处理好知识表示、知识推理和知识运用。
- 核心方法论:自顶向下设计规则,然后通过各种推理,逐步解决问题。
连接主义
- 理念:人的思维就是某些神经元的组合,因此可以在网络层次上模拟人的认知功能,用人脑的并行处理模式,来表征认知过程。
- 核心方法论:试图编写一个通用模型,然后通过数据训练,不断改善模型中的参数,直到输出的结果符合预期。
- 这种受神经科学的启发的网络,被称之人工神经网络(Artificial Neural Network,简称ANN),演化升级后,就是深度学习。
通用近似定理(Universal Approximation Theorem)
只需一个包含足够多神经元的隐藏层,多层前馈网络能以任意精度逼近任意复杂度的连续函数。
换句话说,神经网络可在理论上解决任何问题。
03 - 神经网络不胜语, M-P模型似可寻
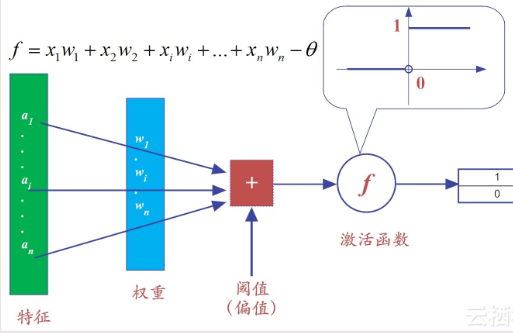
什么是M-P神经元模型?
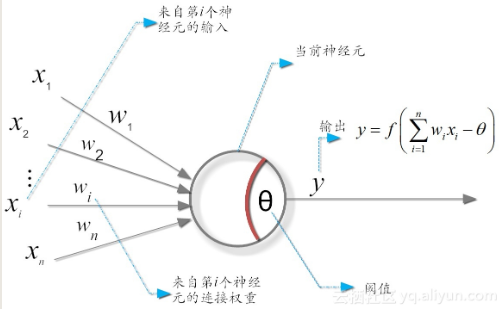
在这个模型中,神经元接收来自n个其它神经元传递过来的输入信号。
这些信号的表达,通常通过神经元之间连接的权重(weight)大小来表示。
神经元将接收到的输入值按照某种权重叠加起来,并将当前神经元的阈值进行比较。
然后通过“激活函数(activation function)”向外表达输出(这在概念上就叫感知机)。
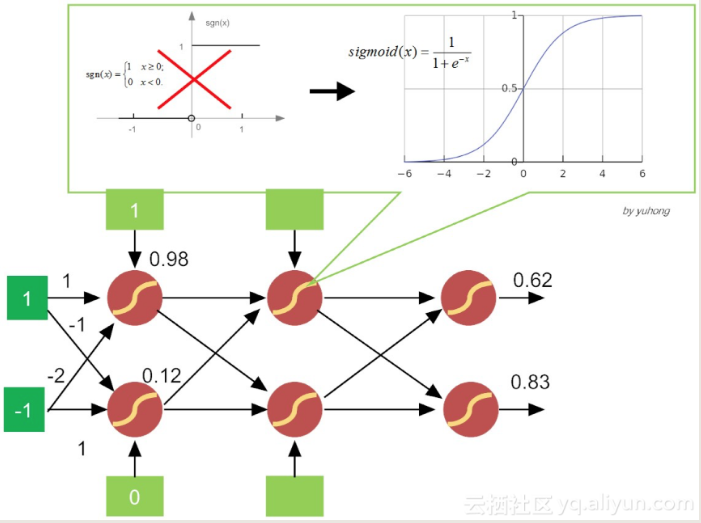
激活函数(activation functions)
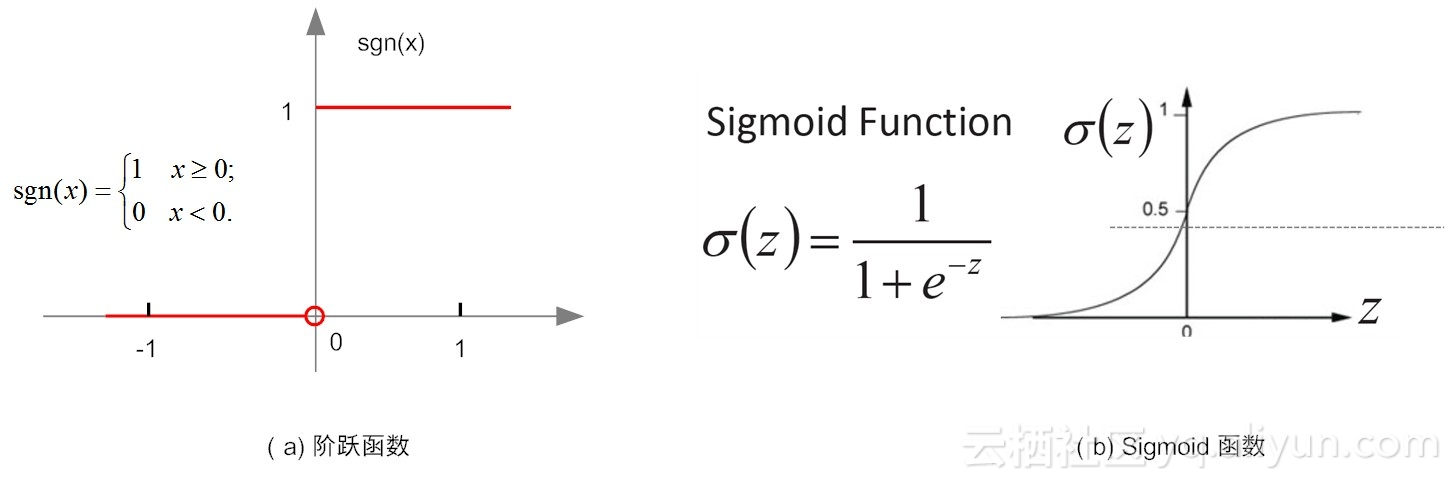
在实际使用中,阶跃函数具有不光滑、不连续等众多不“友好”的特性。
为什么说它“不友好”呢,这是因为在训练网络权重时,通常依赖对某个权重求偏导、寻极值,而不光滑、不连续等通常意味着该函数无法“连续可导”。
通常用Sigmoid函数来代替阶跃函数。这个函数可以把较大变化范围内输入值(x)挤压输出在(0,1)范围之内,故此这个函数又称为“挤压函数(Squashing function)”。
激活函数 (activation function)的定义:一种函数(例如 ReLU 或 S 型函数),用于对上一层的所有输入求加权和,然后生成一个输出值(通常为非线性值),并将其传递给下一层。
卷积函数(convolutional function)
通俗来讲,所谓卷积,就是一个功能和另一个功能在时间的维度上的“叠加”作用。
假设:
- 时间维度上的函数f
- 操作函数g
- 函数h
如果,“h = f * g”,那么卷积得到的函数h一般要比f和g都光滑。
利用这一性质,对于任意的可积函数f,都可简单地构造出一列逼近于f的光滑函数列,这种方法被称之为函数的光滑化或正则化。
在时间的维度上的“叠加作用”,如果函数是离散的,就用求累积和来刻画。如果函数是连续的,就求积分来表达。
“M-P”感知机模型
简单来说,感知机模型,就是一个由两层神经元构成的网络结构,输入层接收外界的输入,通过激活函数(阈值)变换,把信号传送至输出层。
因此也称之为“阈值逻辑单元(threshold logic unit)”,正是这种简单的逻辑单元,慢慢演进,越来越复杂,就构成了深度学习网络。
04 - “机器学习”三重门,“中庸之道”趋若人
机器学习的三种主要形式:监督学习、非监督学习和半监督学习。它们之间核心区别在于是否(部分)使用了标签数据。
监督学习(Supervised Learning)
监督学习基本上就是“分类(classification)”的代名词。
从有标签的训练数据中学习,然后给定某个新数据,预测它的标签(given data, predict labels)。这里的标签(label),其实就是某个事物的分类。
简单来说,监督学习的工作,就是通过有标签的数据训练,获得一个模型,然后通过构建的模型,给新数据添加上特定的标签。
事实上,整个机器学习的目标,都是使学习得到的模型,能很好地适用于“新样本”,而不是仅仅在训练样本上工作得很好。
通过训练得到的模型,适用于新样本的能力,称之为“泛化(generalization)能力”。
非监督学习(Unsupervised Learning)
非监督学习,本质上,就是“聚类(cluster)”的近义词
与监督学习相反的是,非监督学习所处的学习环境,都是非标签的数据。
简单来说,给定数据,从数据中学,能学到什么,就看数据本身具备什么特性了(given data, learn about that data)。
一旦归纳出“类”或“群”的特征,如果再要来一个新数据,就根据它距离哪个“类”或“群”较近,就“预测”它属于哪个“类”或“群”,从而完成新数据的“分类”或“分群”功能。
这里的“类”也好,“群”也罢,事先是不知道的。
半监督学习(Semi-supervised Learning):
这类学习方式,既用到了标签数据,又用到了非标签数据。
事实上,半监督学习就是以“已知之认知(标签化的分类信息)”,扩大“未知之领域(通过聚类思想将未知事物归类为已知事物)”。
但这里隐含了一个基本假设——“聚类假设(cluster assumption)”,其核心要义就是:“相似的样本,拥有相似的输出”。
05 - Hello World感知机,懂你我心才安息
感知机( Perceptrons )
基本上来说,感知机是一切神经网络学习的起点,是神经网络学习的“Hello World”。
所谓的感知机,其实就是一个由两层神经元构成的网络结构。
在输入层接收外界的输入,通过激活函数(含阈值)的变换,把信号传送至输出层,因此也称之为“阈值逻辑单元(threshold logic unit)”。
感知机学习属于“有监督学习”(即分类算法)。
这里,使用了最为简单的阶跃函数(step function)。在阶跃函数中,输出规则非常简单:当x>0时,f(x)输出为1,否则输出0。
感知机的学习与训练
所谓神经网络的学习规则,就是调整权值和阈值的规则(这个结论对于深度学习而言,依然是适用的)。
在有监督的学习规则中,需要根据输出与期望值的“落差”,经过多轮重试,反复调整神经网络的权值,直至这个“落差”收敛到能够忍受的范围之内,训练才告结束。
更一般地,当给定训练数据,神经网络中的参数(权值和阈值)都可以通过不断地“纠偏”学习得到。
学习率的作用是“缓和”每一步权值调整强度的。
如果学习率太小,网络调参的次数就太多,从而收敛很慢。
如果学习率太大,会错过了网络的参数的最优解。
本身的大小比较难以确定的,合适的学习率大小,在某种程度上,还依赖于人工经验。
感知机的表征能力
由于感知机只有输出层神经元可以进行激活函数的处理,也就是说它只拥有单层的功能元神经元(functional neuron),因此它的学习能力是相对有限的。
可以解决原子布尔函数中的“与、或、非”等问题都是线性可分的(linearly separable)的问题。
但却连简单的“异或”功能都无法实现。
06 - 损失函数减肥用,神经网络调权重
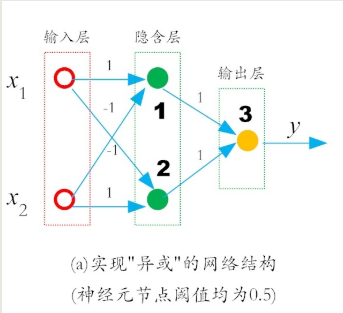
通过多层网络解决“异或”问题
复杂的网络,表征能力就比较强,可以通过多层网络解决“异或”问题。
在输入层和输出层之间,添加一层神经元,将其称之为隐含层(hidden layer,亦有简称为“隐层”)。
这样一来,隐含层和输出层中的神经元都拥有激活函数。
通过设置各个神经元的阈值和权值,就能够实现“异或”功能。
多层前馈神经网络(multi-layer feedforward neural networks
每一层神经元仅仅与下一层的神经元全连接。
而在同一层,神经元彼此不连接,而且跨层的神经元,彼此间也不相连。
这种被简化的神经网络结构,被称之为“多层前馈神经网络”。
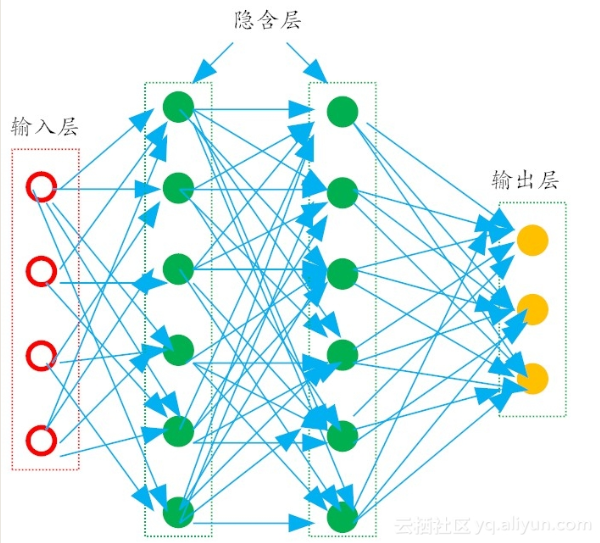
在多层前馈神经网络中,
- 输入层神经元主要用于接收外加的输入信息。
- 在隐含层和输出层中,都有内置的激活函数,可对输入信号进行加工处理。
- 最终的结果,由输出层“呈现”出来。
激活函数可以是阶跃函数、Sigmod函数,还可以是现在深度学习常用的ReLU(Rectified Linear Unit)和sofmax等。
简单来说,神经网络的学习过程,就是通过根据训练数据,来调整神经元之间的连接权值(connection weight)以及每个功能神经元的输出阈值。
连接权值和输出阈值,这是整个神经网络的灵魂所在,需要通过反复训练,方可得到合适的值。
换言之,神经网络需要学习的东西,就蕴含在连接权值和阈值之中。
分布式表征(Distributed Representation)
简单来说,就是当我们表达一个概念时,神经元和概念之间不是一对一对应映射(map)存储的,它们之间的关系是多对多。
具体而言,就是一个概念可以用多个神经元共同定义表达,同时一个神经元也可以参与多个不同概念的表达,只不过所占的权重不同罢了。
分布式表征表示有很多优点。其中最重要的一点,莫过于当部分神经元发生故障时,信息的表达不会出现覆灭性的破坏
损失函数(loss function)
也称为代价函数(cost function)来度量实际输出值和原先预期值二者之间的“落差”程度。
利用损失函数可以反向配置网络中的权值(weight),让损失(loss)最小。
损失函数值越小,说明实际输出和预期输出的差值就越小,也就说明构建的模型越好。
神经网络学习的本质,其实就是利用“损失函数(loss function)”,来调节网络中的权重(weight)。
常见的损失函数
- 0-1损失函数(0-1 loss function)
- 绝对损失函数(absolute loss function)
- 平方损失函数(quadratic loss function)
- 对数损失函数(logarithmic loss function):便于使用最大似然估计的方法来求极值
反向调节网络参数
两大类方法:
误差反向传播(Error Back propagation,简称BP)
简单说来,就是首先随机设定初值,然后计算当前网络的输出,然后根据网络输出与预期输出之间的差值,采用迭代的算法,反方向地去改变前面各层的参数,直至网络收敛稳定。
BP反向传播算法直接把纠错的运算量,降低到只和神经元数目本身成正比的程度。
但实际用起来它还是有些问题。
比如说,在一个层数较多网络中,当它的残差反向传播到最前面的层(即输入层),其影响已经变得非常之小,甚至出现梯度扩散(gradient-diffusion),严重影响训练精度。
逐层初始化”(layer-wise pre-training)训练机制
当前主流的、“深度学习”常用的方法。
不同于BP的“从后至前”的训练参数方法,“深度学习”采取的是一种从“从前至后”的逐层训练方法。
07 - 山重水复疑无路,最快下降问梯度
Sigmoid
激活函数从简单粗暴的“阶跃函数”变成了比较平滑的挤压函数Sigmoid。
激活函数为什么要换成Sigmoid呢?
因为感知机的激活函数是阶跃函数,不利于函数求导,进而求损失函数的极小值。
当分类对象是线性可分,且学习率(learning rate)足够小时,由感知机还堪胜任,由其构建的网络,还可以训练达到收敛。
但分类对象不是线性可分时,感知机就有点“黔驴技穷”了。
因此,通常感知机并不能推广到一般前馈网络中。
选择最佳的参数
如何从众多网络参数(神经元之间的链接权值和阈值)中选择最佳的参数呢?
最简单粗暴的方法,当然就是枚举所有可能值了!
但这种暴力调参找最优参数,不适用稍微复杂(层次多、神经元多)的网络,既不优雅,也不高效,故实不可取!
delta法则(delta rule)方法可以让目标收敛到最佳解的近似值。
核心思想在于,使用梯度下降(gradient descent)的方法找极值。
具体说来,就是在假设空间中搜索可能的权值向量,并以“最佳”的姿态,来拟合训练集合中的样本,也就是使损失函数达到最小值!
梯度递减(gradient descent)
也称为梯度下降。
一种通过计算并且减小梯度将损失降至最低的技术,它以训练数据为条件,来计算损失相对于模型参数的梯度。
通俗来说,梯度下降法以迭代方式调整参数,逐渐找到权重和偏差的最佳组合,从而将损失降至最低。
行动是绝望的解药!
欢迎转载和引用,但请在明显处保留原文链接和原作者信息!
本博客内容多为个人工作与学习的记录,少数内容来自于网络并略有修改,已尽力标明原文链接和转载说明。如有冒犯,即刻删除!
以所舍,求所得,有所获,方所成。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号