
在Linux驱动之按键驱动编写(查询方式)已经写了一个查询方式的按键驱动,但是查询方式太占用CPU,接下来利用中断方式编写一个驱动程序,使得CPU占有率降低,在按键空闲时调用read系统调用的进程可以休眠,还是以以下步骤编写:
5、编写Makefile,编译驱动代码与测试代码,在开发板上运行
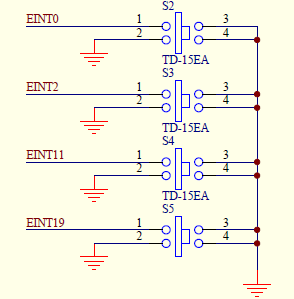
打开原理图,确定需要控制的IO端口为GPF0、GPF2、GPG3、GPG11。可以看到它的中断号为IRQ_EINT0、IRQ_EINT2、IRQ_EINT11、IRQ_EINT19
2、查看芯片手册,确定IO端口的寄存器地址,可以看到因为用了两组GPIO端口,所以它的基地址分别为0x56000050、0x56000060。中断方式的寄存器基地址为0x56000088、0x5600008c、0x56000090



1)、编写出口、入口函数。代码如下,具体说明参考Linux驱动之LED驱动编写
static int second_drv_init(void) { Secondmajor = register_chrdev(0, "buttons", &second_drv_ops);//注册驱动程序 if(Secondmajor < 0) printk("failes 1 buttons_drv register\n"); second_drv_class = class_create(THIS_MODULE, "buttons");//创建类 if(second_drv_class < 0) printk("failes 2 buttons_drv register\n"); second_drv_class_dev = class_device_create(second_drv_class, NULL, MKDEV(Secondmajor,0), NULL,"buttons");//创建设备节点 if(second_drv_class_dev < 0) printk("failes 3 buttons_drv register\n"); gpfcon = ioremap(0x56000050, 16);//重映射 gpfdat = gpfcon + 1; gpgcon = ioremap(0x56000060, 16);//重映射 gpgdat = gpgcon + 1; printk("register buttons_drv\n"); return 0; } static void second_drv_exit(void) { unregister_chrdev(Secondmajor,"buttons"); class_device_unregister(second_drv_class_dev); class_destroy(second_drv_class); iounmap(gpfcon); iounmap(gpgcon); printk("unregister buttons_drv\n"); } module_init(second_drv_init); module_exit(second_drv_exit);
2)、 添加file_operations 结构体,这个是字符设备驱动的核心结构,所有的应用层调用的函数最终都会调用这个结构下面定义的函数
static struct file_operations third_drv_ops = { .owner = THIS_MODULE, .open = third_drv_open, .read = third_drv_read, .release = third_drv_close,//增加关闭函数 };
3)、分别编写file_operations 结构体下的open、read、release 函数。其中open函数主要将相应的IO端口配置成中断功能,并且向内核注册中断;read函数主要是在按键引脚电平未改变时休眠,然后按键引脚电平改变后,将按键值传给应用程序处理。(按键值的处理在中断处理程序中);relase函数的功能主要是从内核释放掉open函数注册的中断。程序如下:
static int third_drv_open (struct inode * inode, struct file * file) { int ret; ret = request_irq(IRQ_EINT0, buttons_irq, IRQT_BOTHEDGE, "s1", (void * )&pins_desc[0]);//注册一个外部中断S1,双边沿触发,dev_id为&pins_desc[0] if(ret) { printk("open failed 1\n"); return -1; } ret = request_irq(IRQ_EINT2, buttons_irq, IRQT_BOTHEDGE, "s2", (void * )& pins_desc[1]);//注册一个外部中断S2,双边沿触发,dev_id为&pins_desc[1] if(ret) { printk("open failed 2\n"); return -1; } ret = request_irq(IRQ_EINT11, buttons_irq, IRQT_BOTHEDGE, "s3", (void * )&pins_desc[2]);//注册一个外部中断S3,双边沿触发,dev_id为&pins_desc[2] if(ret) { printk("open failed 3\n"); return -1; } ret = request_irq(IRQ_EINT19, buttons_irq, IRQT_BOTHEDGE, "s4", (void * )&pins_desc[3]);//注册一个外部中断S4,双边沿触发,dev_id为&pins_desc[3] if(ret) { printk("open failed 4\n"); return -1; } return 0; } static int third_drv_close(struct inode * inode, struct file * file) { free_irq(IRQ_EINT0 ,(void * )&pins_desc[0]);//释放中断,根据IRQ_EINT0找到irq_desc结构。根据pins_desc[0]找到irq_desc->action结构 free_irq(IRQ_EINT2 ,(void * )& pins_desc[1]);//释放中断,根据IRQ_EINT2找到irq_desc结构。根据pins_desc[2]找到irq_desc->action结构 free_irq(IRQ_EINT11 ,(void * )&pins_desc[2]);//释放中断,根据IRQ_EINT11找到irq_desc结构。根据pins_desc[3]找到irq_desc->action结构 free_irq(IRQ_EINT19 ,(void * )&pins_desc[3]);//释放中断,根据IRQ_EINT19找到irq_desc结构。根据pins_desc[4]找到irq_desc->action结构 return 0; } static ssize_t third_drv_read(struct file * file, char __user * userbuf, size_t count, loff_t * off) { int ret; if(count != 1) { printk("read error\n"); return -1; } wait_event_interruptible(button_waitq, ev_press);//将当前进程放入等待队列button_waitq中,并且释放CPU进入睡眠状态 ret = copy_to_user(userbuf, &key_val, 1);//将取得的按键值传给上层应用 ev_press = 0;//按键已经处理可以继续睡眠 if(ret) { printk("copy error\n"); return -1; } return 1; }
4)、中断处理函数的编写,中断处理函数利用注册中断时传入的dev_id这个值来判断是哪个按键发生了中断,dev_iq被赋值为pin_desc结构,如下:
struct pin_desc { unsigned int pin; //是哪个按键 unsigned int key_val; //按键的按键值 }; static struct pin_desc pins_desc[4] = { {S3C2410_GPF0,0x01}, {S3C2410_GPF2,0x02}, {S3C2410_GPG3,0x03}, {S3C2410_GPG11,0x04} };
取得哪个引脚发生的中断信息后,取得相应的引脚电平,然后确定按键值。接着将值传给key_val,再唤醒调用read的进程,将值直接拷贝给应用程序。具体函数如下
static unsigned int key_val;//全局变量 /* *0x01、0x02、0x03、0x04表示按键被按下 */ /* *0x81、0x82、0x83、0x84表示按键被松开 */ /* *利用dev_id的值为pins_desc来判断是哪一个按键被按下或松开 */ static irqreturn_t buttons_irq(int irq, void *dev_id) { unsigned int pin_val; struct pin_desc * pin_desc = (struct pin_desc *)dev_id;//取得哪个按键被按下的状态,dev_id是action->dev_id,即在注册中断时传入的&pin_desc[num] pin_val = s3c2410_gpio_getpin(pin_desc->pin); //取得按键对应的IO口的电平状态 if(pin_val) //按键松开 key_val = 0x80 | pin_desc->key_val; else key_val = pin_desc->key_val; wake_up_interruptible(&button_waitq); /* 唤醒休眠的进程,即调用read函数的进程 */ ev_press = 1; return IRQ_HANDLED; }
5)、整体代码
#include <linux/module.h> #include <linux/kernel.h> #include <linux/fs.h> #include <linux/init.h> #include <asm/io.h> //含有iomap函数iounmap函数 #include <asm/uaccess.h>//含有copy_from_user函数 #include <linux/device.h>//含有类相关的处理函数 #include <asm/arch/regs-gpio.h>//含有S3C2410_GPF0等相关的 #include <linux/irq.h> //含有IRQ_HANDLED\IRQ_TYPE_EDGE_RISING #include <asm-arm/irq.h> //含有IRQT_BOTHEDGE触发类型 #include <linux/interrupt.h> //含有request_irq、free_irq函数 //#include <asm-arm\arch-s3c2410\irqs.h> static struct class *third_drv_class;//类 static struct class_device *third_drv_class_dev;//类下面的设备 static int thirdmajor; static unsigned long *gpfcon = NULL; static unsigned long *gpfdat = NULL; static unsigned long *gpgcon = NULL; static unsigned long *gpgdat = NULL; struct pin_desc { unsigned int pin; //是哪个按键 unsigned int key_val; //按键的按键值 }; static struct pin_desc pins_desc[4] = { {S3C2410_GPF0,0x01}, {S3C2410_GPF2,0x02}, {S3C2410_GPG3,0x03}, {S3C2410_GPG11,0x04} }; unsigned int ev_press; DECLARE_WAIT_QUEUE_HEAD(button_waitq);//注册一个等待队列button_waitq static unsigned int key_val;//全局变量 /* *0x01、0x02、0x03、0x04表示按键被按下 */ /* *0x81、0x82、0x83、0x84表示按键被松开 */ /* *利用dev_id的值为pins_desc来判断是哪一个按键被按下或松开 */ static irqreturn_t buttons_irq(int irq, void *dev_id) { unsigned int pin_val; struct pin_desc * pin_desc = (struct pin_desc *)dev_id;//取得哪个按键被按下的状态,dev_id是action->dev_id,即在注册中断时传入的&pin_desc[num] pin_val = s3c2410_gpio_getpin(pin_desc->pin); //取得按键对应的IO口的电平状态 if(pin_val) //按键松开 key_val = 0x80 | pin_desc->key_val; else key_val = pin_desc->key_val; wake_up_interruptible(&button_waitq); /* 唤醒休眠的进程,即调用read函数的进程 */ ev_press = 1; return IRQ_HANDLED; } static int third_drv_open (struct inode * inode, struct file * file) { int ret; ret = request_irq(IRQ_EINT0, buttons_irq, IRQT_BOTHEDGE, "s1", (void * )&pins_desc[0]);//注册一个外部中断S1,双边沿触发,dev_id为&pins_desc[0] if(ret) { printk("open failed 1\n"); return -1; } ret = request_irq(IRQ_EINT2, buttons_irq, IRQT_BOTHEDGE, "s2", (void * )& pins_desc[1]);//注册一个外部中断S2,双边沿触发,dev_id为&pins_desc[1] if(ret) { printk("open failed 2\n"); return -1; } ret = request_irq(IRQ_EINT11, buttons_irq, IRQT_BOTHEDGE, "s3", (void * )&pins_desc[2]);//注册一个外部中断S3,双边沿触发,dev_id为&pins_desc[2] if(ret) { printk("open failed 3\n"); return -1; } ret = request_irq(IRQ_EINT19, buttons_irq, IRQT_BOTHEDGE, "s4", (void * )&pins_desc[3]);//注册一个外部中断S4,双边沿触发,dev_id为&pins_desc[3] if(ret) { printk("open failed 4\n"); return -1; } return 0; } static int third_drv_close(struct inode * inode, struct file * file) { free_irq(IRQ_EINT0 ,(void * )&pins_desc[0]);//释放中断,根据IRQ_EINT0找到irq_desc结构。根据pins_desc[0]找到irq_desc->action结构 free_irq(IRQ_EINT2 ,(void * )& pins_desc[1]);//释放中断,根据IRQ_EINT2找到irq_desc结构。根据pins_desc[2]找到irq_desc->action结构 free_irq(IRQ_EINT11 ,(void * )&pins_desc[2]);//释放中断,根据IRQ_EINT11找到irq_desc结构。根据pins_desc[3]找到irq_desc->action结构 free_irq(IRQ_EINT19 ,(void * )&pins_desc[3]);//释放中断,根据IRQ_EINT19找到irq_desc结构。根据pins_desc[4]找到irq_desc->action结构 return 0; } static ssize_t third_drv_read(struct file * file, char __user * userbuf, size_t count, loff_t * off) { int ret; if(count != 1) { printk("read error\n"); return -1; } wait_event_interruptible(button_waitq, ev_press);//将当前进程放入等待队列button_waitq中,并且释放CPU进入睡眠状态 ret = copy_to_user(userbuf, &key_val, 1);//将取得的按键值传给上层应用 ev_press = 0;//按键已经处理可以继续睡眠 if(ret) { printk("copy error\n"); return -1; } return 1; } static struct file_operations third_drv_ops = { .owner = THIS_MODULE, .open = third_drv_open, .read = third_drv_read, .release = third_drv_close,//增加关闭函数 }; static int third_drv_init(void) { thirdmajor = register_chrdev(0, "buttons", &third_drv_ops);//注册驱动程序 if(thirdmajor < 0) printk("failes 1 buttons_drv register\n"); third_drv_class = class_create(THIS_MODULE, "buttons");//创建类 if(third_drv_class < 0) printk("failes 2 buttons_drv register\n"); third_drv_class_dev = class_device_create(third_drv_class, NULL, MKDEV(thirdmajor,0), NULL,"buttons");//创建设备节点 if(third_drv_class_dev < 0) printk("failes 3 buttons_drv register\n"); gpfcon = ioremap(0x56000050, 16);//重映射 gpfdat = gpfcon + 1; gpgcon = ioremap(0x56000060, 16);//重映射 gpgdat = gpgcon + 1; printk("register buttons_drv\n"); return 0; } static void third_drv_exit(void) { unregister_chrdev(thirdmajor,"buttons"); class_device_unregister(third_drv_class_dev); class_destroy(third_drv_class); iounmap(gpfcon); iounmap(gpgcon); printk("unregister buttons_drv\n"); } module_init(third_drv_init); module_exit(third_drv_exit); MODULE_LICENSE("GPL");
测试程序实现四个按键中有一个按键按下时,打印出这个按键的按键值。./third_test。直接看代码
#include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <stdio.h> /* *usage ./buttonstest */ int main(int argc, char **argv) { int fd; char* filename="dev/buttons"; unsigned char key_val; unsigned long cnt=0; fd = open(filename, O_RDWR);//打开dev/firstdrv设备文件 if (fd < 0)//小于0说明没有成功 { printf("error, can't open %s\n", filename); return 0; } if(argc !=1) { printf("Usage : %s ",argv[0]); return 0; } while(1) { read(fd, &key_val, 1); printf("key_val: %x\n",key_val); } return 0; }
5、编写Makefile,编译驱动代码与测试代码,在开发板上运行
Makefile源码如下:
KERN_DIR = /work/system/linux-2.6.22.6 all: make -C $(KERN_DIR) M=`pwd` modules //M='pwd'表示当前目录。这句话的意思是利用内核目录下的Makefile规则来编译当前目录下的模块 clean: make -C $(KERN_DIR) M=`pwd` modules clean rm -rf modules.order obj-m +=third_drv.o//调用内核目录下Makefile编译时需要用到这个参数
1)、然后在当前目录下make后编译出third_drv.ko文件
2)、arm-linux-gcc -o third_test third_test.c编译出third_test测试程序
3)、cp third_drv.ko third_test /work/nfs_root将编译出来的文件拷贝到开发板挂接的网络文件系统上
4)、执行insmod third_drv.ko加载驱动。
5)、./third_test测试程序,按下按键,成功打印按键值,用top命令查看应用程序发现third_test程序占用了0%的CPU资源,驱动程序相比查询方式的驱动改善了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号