


强化学习TD3论文阅读及实验
简介
论文名称:Addressing Function Approximation Error in Actor-Critic Methods
论文地址:https://arxiv.org/abs/1802.09477
论文来源:ICML 2018
针对问题
在value-based强化学习方法,如DQN中,值函数近似误差可能会导致过估计(overestimated)和次优策略。此外,在actor-critic架构的算法中也会存在此类问题。
本文研究
本文提出了Twin Delayed DDPG (TD3)算法,通过引入三个关键技巧来解决这个问题:
-
Clipped Double Q-Learning
-
Delayed Policy Updates
-
Target Policy Smoothing
Clipped Double Q-Learning
尽管之前有许多方法来解决overestimation的问题,但是它们在actor-critic架构中是无效的。
在Double DQN中,将“动作的选择与动作的评估都由target网络来定”这个操作进行“解耦”来减少overestimation,即使用current network来获取a',使用target network来计算Q(s',a')。在actor-critic架构中也可以使用类似的思想:
但是实际上,由于actor-critic策略更新很缓慢,导致current net与target net非常相似,即\(\pi_\phi(s')\)与\(\pi_{\phi'}(s')\)选择的动作非常相似,从而无法达到“解耦”的目的。
然而原始的Double Q-learning方法却好的效果:
本文也通过实验证明了Double Q-learning的方法确实比Double DQN的方法更能解决overestimation,具体如下:
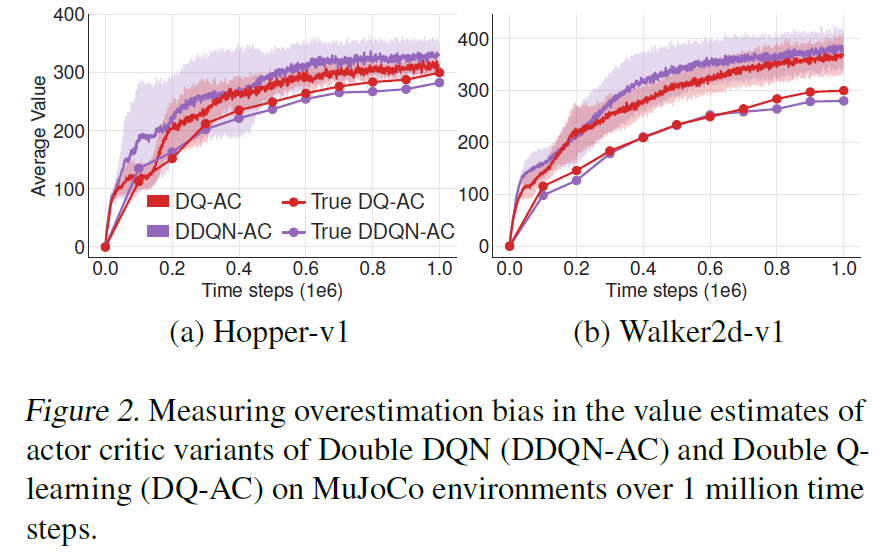
但是直接使用Double Q-learning也是不行的,因为两个critic也不是完全独立的,它们在更新自己时也会用到对方的critic,并且都使用的同一个经验池,也会导致对某些状态的过估计。为了解决这个问题,本文提出了Clipped Double Q-Learning,即取两个Q中小的作为target:
虽然这个会导致对状态价值的underestimation,但是这远比overestimation要好。
此外,对于policy net只使用一个,即通过\(Q_{\theta_1}\)来更新\(\pi_\phi\)。那么当\(Q_{\theta'_2}>Q_{\theta'_1}\)时,就会选\(Q_{\theta'_1}\)来更新\(Q_{\theta_1}\),也就是标准的更新,没有额外偏差。当\(Q_{\theta'_2}<Q_{\theta'_1}\)时,就会选\(Q_{\theta'_2}\)来更新\(Q_{\theta_1}\),表示产生了过估计,用Double Q-learning的思想来解决。
Delayed Policy Updates
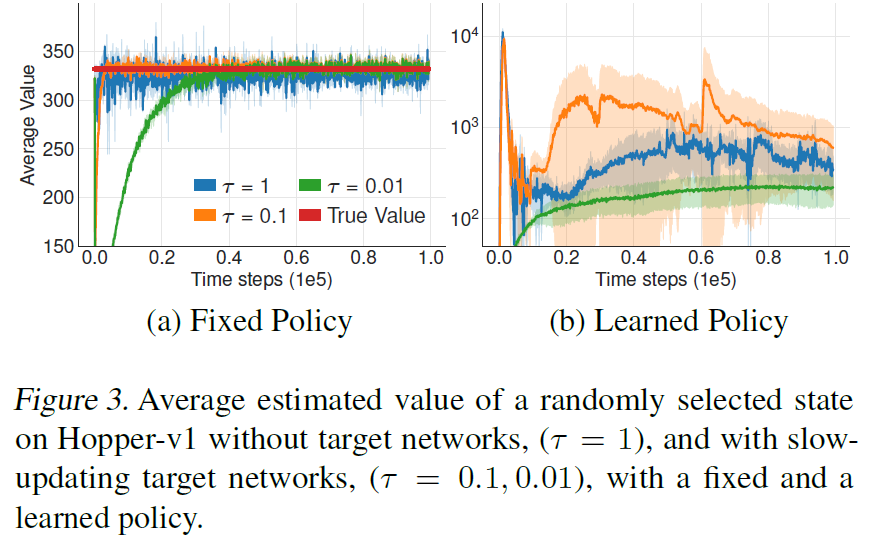
上面解决了高方差引起的overestimation bias,那高方差本身如何解决呢?使用Target net确实可以减少Q值的方差,但是Target net更新的快慢也会影响方差,本文通过如下实验说明了使用更快的Target更新速度(黄色和蓝色线),会导致高的方差(对Q值的估计波动大)。这种高方差的Q估计会影响policy net的更新,导致策略网络无法收敛。原因是DDPG的policy net也是根据Q来更新的,如果Q一直大幅抖动变化,那么policy net就不知道到底哪个Q是好的,也就是一会Q大,一会Q小的时候,policy net不知道去逼近哪一个了。
因此本文的方法是,让policy net和Target net在Q net更新之后延迟更新,一来保证了Target net更新不那么快,二来使得Q net有一定收敛度之后(方差不那么大之后),再来更新policy net。
Target Policy Smoothing
确定性策略可能会对Target net的局部最优过拟合,因此在计算Target net时给a'加上噪声,使其current net在Target net周围的一定范围内更新。
注意区分几个noise:
- 采样时,为了增加探索,给
actor的结果加上noise。 - 更新
critic而计算Target Q时,为了避免过拟合与局部最优,给actor的结果加上noise。 - 更新
actor时,因为就是要找使Q值最大的action,所以不需要加noise。
伪代码

实验效果
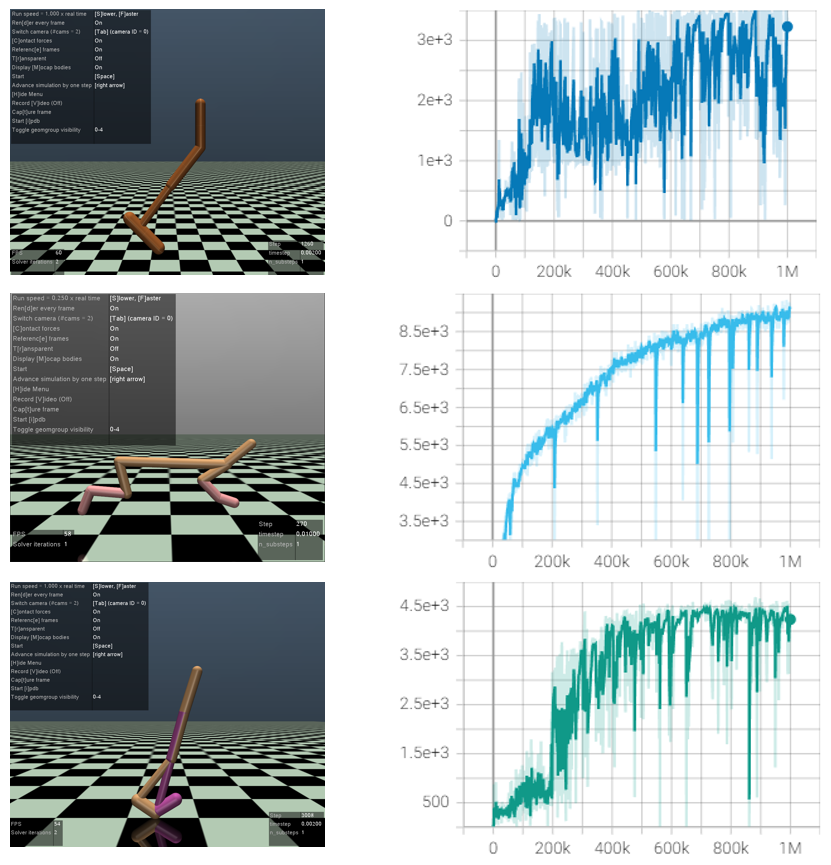
代码参照Github
在Mujoco的Hopper-v2,HalfCheetah-v2和Walker2d-v2上各训练100万步的训练曲线如下:
注:本文部分内容仅个人见解,如有错误也欢迎读者批评指正。
参考
https://zhuanlan.zhihu.com/p/111334500
https://spinningup.openai.com/en/latest/algorithms/td3.html
https://blog.csdn.net/weixin_39059031/article/details/104654259

