
面向自动驾驶的高精地图及数据采集生产体系
前言:又到春招季!作为国民级出行服务平台,高德业务快速发展,大量校招/社招名额开放,欢迎大家投递简历,详情见文末。为帮助大家更了解高德技术,我们策划了#春招专栏#的系列文章,组织各业务团队的高年级同学以业务科普+技术应用实践为主要内容为大家做相关介绍。
本文是#春招专栏#系列的第 2 篇,根据高德高精地图业务总经理向哲在AT技术讲坛分享的《面向自动驾驶的高精地图及采集生产体系》内容整理而成。在不影响原意的情况下对内容略作删节。
AT技术讲坛(Amap Technology Tribune)是高德发起的一档技术交流活动,每期围绕一个主题,我们会邀请阿里集团内外的专家以演讲、QA、开放讨论的方式,与大家做技术交流。
向哲本次主要分享了两方面的内容:
1.面向自动驾驶的高精地图是什么;
2.当下的高精地图数据采集生产体系建设现状和思考。
高精地图是自动驾驶汽车不可或缺的核心条件,它需要准确表达现实世界各类要素的空间位置和相对关系,因此高精地图的生产对采集资料的精度要求很高。
工业级的自动驾驶分类
向哲结合自动驾驶在工业级的应用现状开始讲起。

目前工业级自动驾驶大致可以分为两类,第一类是以特斯拉、小鹏等造车新势力为用户生产的具备“辅助驾驶功能”的智能车为代表。用户在使用这些自动驾驶功能时,要随时接管驾驶,驾车过程中出现的法律问题责任主要在人类。
高德和市场上主流的造车新势力厂商在高精地图方面有深度合作。以小鹏汽车为例,它的辅助驾驶功能使用了高德所提供的高精地图能力。目前用户可以享受到什么样的辅助驾驶能力呢?基本已经实现了高速公路上点到点的自动驾驶功能。
比如,从北京开车走高速到广州,途中会遇到若干段高速的切换,即从一段高速通过匝道换到另一段高速,以及在高速上的变道超车。小鹏汽车的NGP辅助驾驶能力具备了以上两种能力,基本具备了从北京到广州的全程自动驾驶功能。
但在行车过程中,司机要随时盯着路况,在自动换道等时候如果有剐蹭的风险要人工接管驾驶,继续手动驾驶完成换道。这意味着,驾驶过程中,司机要随时准备接管驾驶。
另外,在途经收费站的时候,司机也需要手动接管汽车的驾驶,因为目前高精地图还没做到收费站里的车道级信息。在接近收费站的时候,语音助手会提示司机,前方收费站道路没有高精地图,需要手动接管驾驶。以上的自动驾驶能力都会应用到小鹏所有P7车型上。
第二类工业级自动驾驶就是典型的L4。例如谷歌在做的在城市里自动驾驶的出租车,物流干线货车等,跟第一类自动驾驶相比,这类L4自动驾驶理论上在车上是没有司机的。虽然现在在验证阶段,司机席还有司机。据向哲预测,这类L4无人驾驶出租车要想走进普通人的生活中还要有4~5年的时间。
以上的两类自动驾驶都强依赖于高精地图。
高精地图与自动驾驶
高精地图是自动驾驶车辆“脑子”里的地图,能够让车辆知道接下来"看不见"的路况是什么样的。自动驾驶的四个关键功能:感知、高精定位、决策规划、车辆控制。这里面至少有三个功能都强依赖于高精地图。

感知:人类驾驶汽车时要观察周边的车道线、交通牌、杆等信息。智能车上的传感器会感知道路周边的物体信息。高精地图提供了上帝视角的超视觉感知能力。尤其是在车前方有大货车等遮挡物导致人眼和传感器无法看清前方车道线等信息的时候,高精地图数据可以告知车辆前方道路信息。
高精定位:自动驾驶的汽车要精确知道车在地图中的位置,前提就要依靠高精地图所提供的底图。自动驾驶的车要知道自己在地图中的位置,基于两个能力,一是基于GPS、惯导、千寻等定位能力所提供的绝对位置信息。绝对位置信息跟地图经纬坐标相匹配,可以判定得到车辆在地图中的具体位置(依赖于传感器进行绝对位置定位的能力)。
但仅有绝对位置定位还不够,在特殊区域,例如高楼、峡谷等会发生遮挡信号的时候,绝对定位精度会变差,自动驾驶需要借助于观察周围的车道线、信号牌、杆子进行的相对定位来辅助,需要跟高精地图中的地图数据进行匹配判断。在实际项目中,高德通过和主流车厂的深度合作,一起来判断通过哪些技术能获得更加精准的相对定位能力。
决策规划:自动驾驶要符合驾驶规则,所以要高度依赖车道线、交通限制设施、红绿灯等道路元素的。
以上的几个功能都是彼此支撑关系。
面向自动驾驶的高精地图
几个关键要素:道路层、车道层、定位对象、动态层。
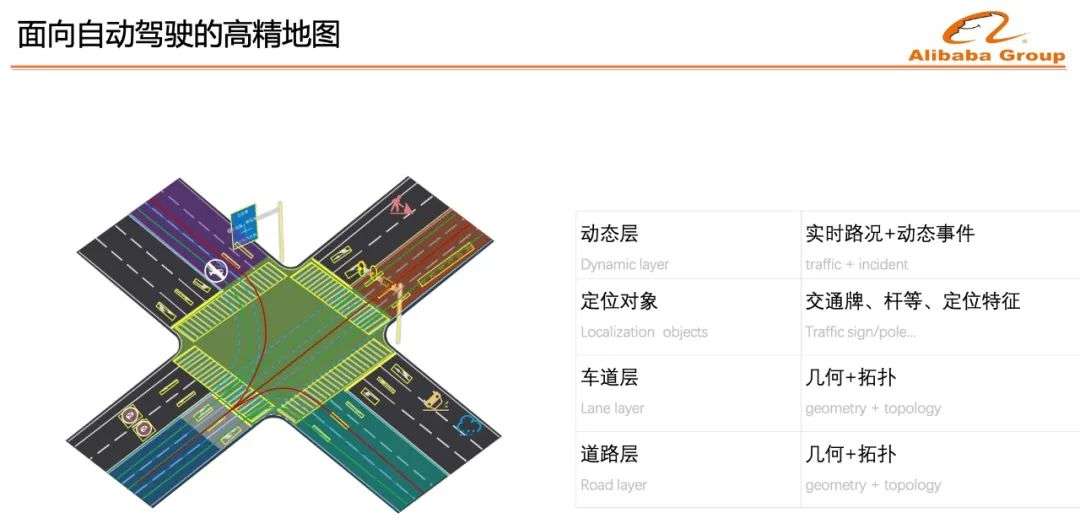
道路层:HD(高精地图)和SD(普通地图)的数据是紧密匹配的。目前几乎所有自动驾驶都是先由用户告诉智能系统,我要从某地开往某地,这两个地点之间的驾驶路线规划由SD道路数据来支持。HD数据并不孤立,要和SD数据连接。SD数据能力是高德的传统强项,加上业界领先的HD能力,这种匹配高德一定是业界做的最好的。这也是汽车厂商在选择地图服务商时很看重的一点。
车道层:所有的自动驾驶底层的对车辆的控制都依赖于高精地图数据。
定位对象:高德跟车厂密切合作,车厂基于哪些技术来做相对定位,选择哪些参考对象,精度做到什么水平等等,双方一起沟通联合研发。
动态层:未来的高精地图一定会含动态层,实时数据,某条车道在某个时刻发生哪些动态交通事件。
高精地图在城市普通路的挑战
目前高德的高精度地图已经完成了对高速和城市快速路段超30万公里道路的采集,正在进入稳定的定期更新状态。相比高速城快,更难的题在城市普通路。
城市高精地图数据的一个关键挑战在于路口,很多路口的地面缺乏交通线绘制。自动驾驶的汽车在路口间转向的时候,车辆驶过地面没有交通线(油漆),这时候就要依赖于高精地图事先做好的数据。当然,要考虑的当然不只是路口的地面交通线,还要考虑大量其他交通元素。但城市普通路的自动驾驶肯定是地图服务商和造车新势力未来会投入很大精力的重要场景。
高精地图的采集和生成
常规的高精地图生产可以概括为“采集”、“生产”、“产品化”三个阶段。

采集车是由多种先进测量传感器精密集成的移动采集系统,一般会包含Lidar、惯导、相机等设备,根据采集场景不同搭载不同型号的传感器设备。高德高精团队经过多年深耕,自研了高精采集车系统,具有精度高、速度快、数据产生周期短、自动化程度高、安全性高、信息全等特点。
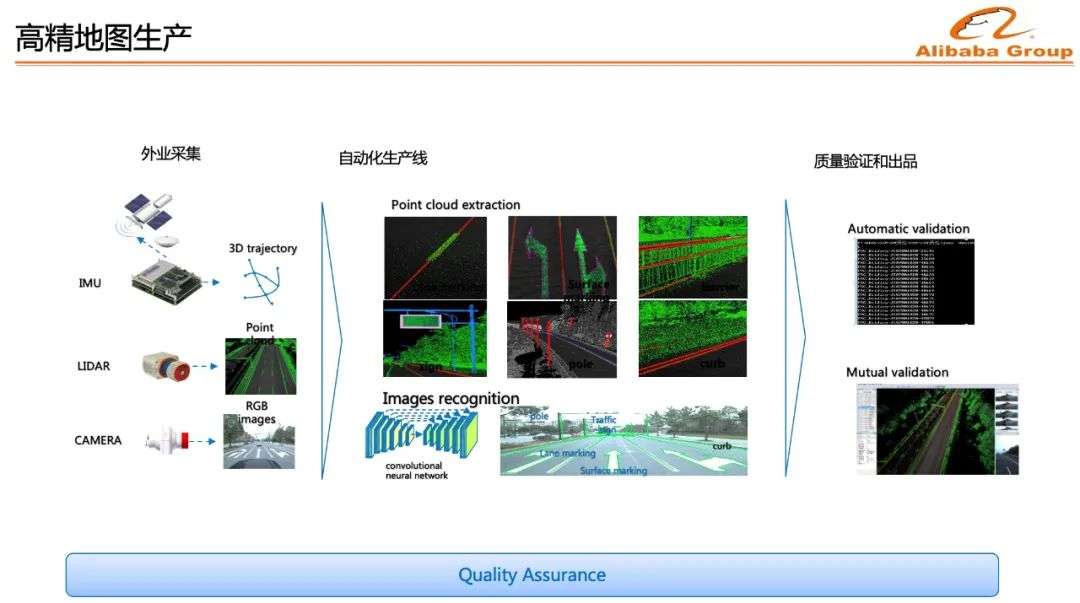
采集设备把外部现实世界里含精度的数据采集回来以后,还要通过图像识别、精度处理、人工处理等步骤才能“变成”可以用的高精地图数据。
“鲜”的高精地图
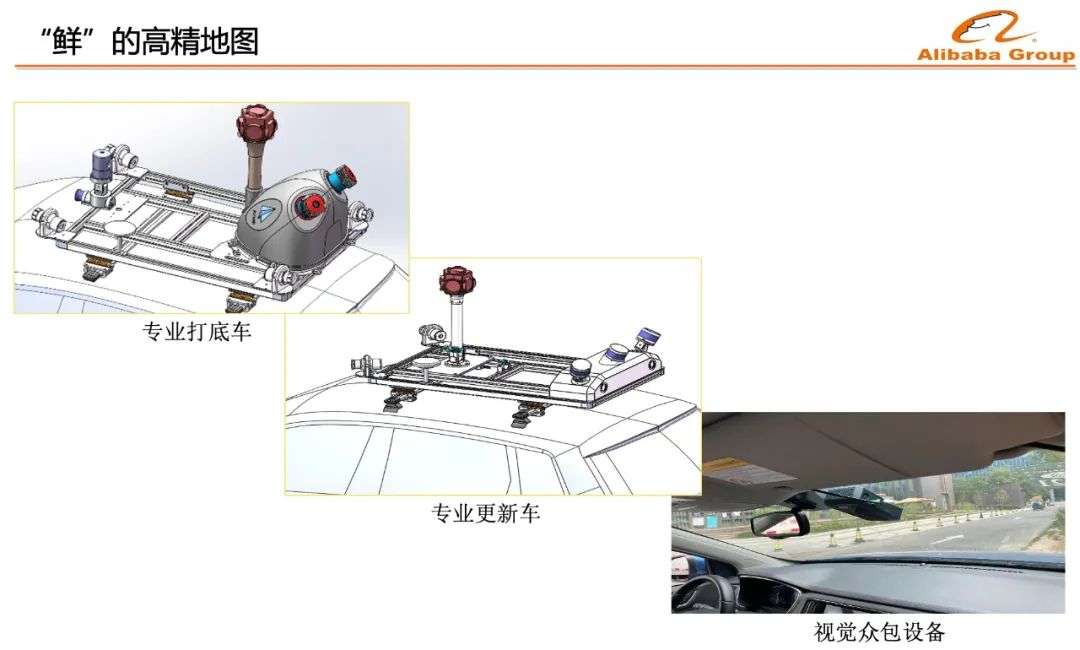
现实生活中的道路数据处在不停的变化之中,如何才能做到“鲜”的高精地图。
首先,最开始的时候要用成本相对昂贵的专业打底车,在全国道路范围内测量和采集高精地图数据。这种采集要同时保证相对精度和绝对精度。然后,用相对廉价的专业更新车来采集路面信息的局部变化(相对变化)图识,例如重新刷过地面标识,新竖立的牌、杆等。同时,我们也用更廉价的众包设备做更快速的采集更新。
为实现对既有数据的快速更新,提升数据数据鲜度。高德的高精团队,搭建了专业打底车、专业更新车、众包更新三级能力的采集体系,结合在一起解决精度、鲜度的问题。在真实业务场景里需要在精度和鲜度找到平衡,反复的迭代。
要解决高精地图数据的“高精度”、“大规模”、“足够鲜”等诸多挑战,需要在很多技术点上进行突破。
比如:如何设计制造不同成本、不同精度、不同部署能力的采集测绘设备;
如何协同不同类设备协同进行采集,同时满足精度、鲜度上的产品要求;
如何设计和应用算法,提升采集资料的绝对精度、相对精度,并保证多次采集资料之间彼此对齐严丝合缝;
如何综合应用图像和点云做好识别,提升生产的自动化水平。
高德高精地图团队的同学分别专注在不同方向上,并以开放的心态接受业务挑战,共同讨论和设计方案,也取得了很多成绩。
凭借这份国内精度最高、覆盖最广的高精地图,高德成功拿下了国内外多款主流车厂的商业订单,开始为智能驾驶车型提供高精定位、超视距感知、车道级导航等服务。作为高德在自动驾驶生态中重点突破的领域,高德高精地图业务发展快,机会多,希望大家一起加入。
关于高精地图业务中心
高精地图是高德最具创新性的业务之一,致力于用传感器丈量世界,用算法理解世界,用数据重新定义世界。我们几乎涵盖最热门前沿学科,高精地图和自动驾驶是多学科交叉的应用工程体系。基于感知理解,三维重建,融合定位,计算几何技术自动化生成高精数字化三维地图。利用边缘计算,大数据处理,云服务,进行实时海量数据地图重建。通过5G/V2X信息交换,实现地图对象间的数据互通,构建一张活地图。我们不仅仅是数据制作者,更是新生活的定义者。加入我们,未来“由”你。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号